
对话南佛罗里达大学孙宇教授:当大语言模型用于机器人任务规划丨IJAIRR




基于知识网络的机器人任务规划
如何规划一个知识库中完全不存在的任务?
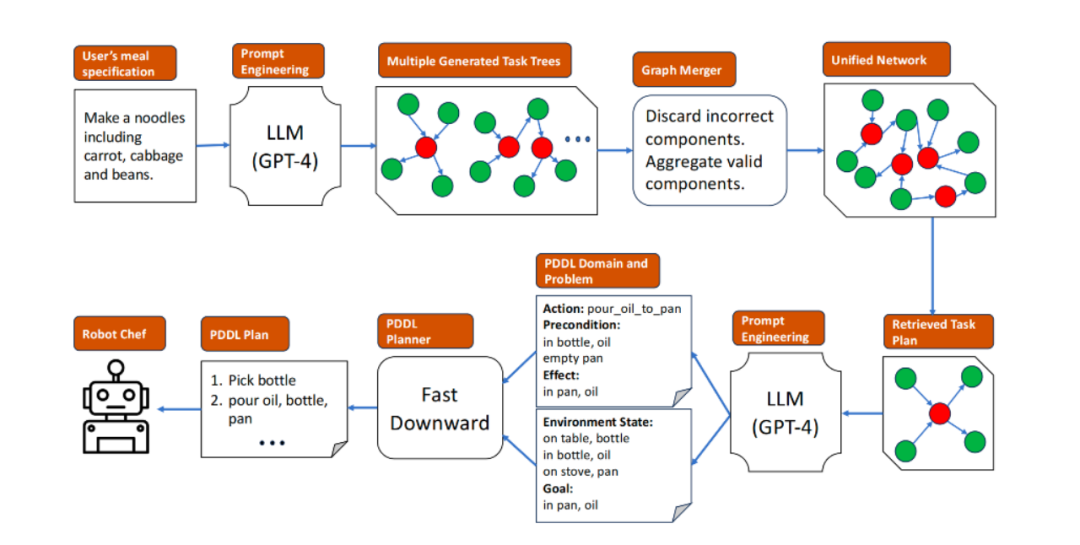
大语言模型与知识网络的相互补充



专访纽约城市大学田英利教授:用多通道、多模态的方法「看懂」手语

专访GAIR研究院院长朱晓蕊:以Web3技术为引擎,推动「去中心化科学期刊」的新时代

人工智能与机器人研究国际期刊(IJAIRR)正式成立,重点关注AI、机器人及基础科学交叉学科丨 GAIR 2023

评论