
CNN卷积神经网络入门超详细解析
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
来源:CSDN
作者:越前浩波
一、神经网络
首先了解什么是神经网络,大家可以先看下以下两篇博客,一篇为纯理论讲解,一篇为实战加理论,在此就不过多详细介绍。
机器学习之神经网络学习及其模型(https://blog.csdn.net/weixin_44023658/article/details/105691321)
入门讲解:使用numpy实现简单的神经网络(BP算法)
(https://blog.csdn.net/weixin_44023658/article/details/105694079)
二、卷积神经网络之层级结构
要了解卷积神经网络首先要了解它的各个层级结构,如下图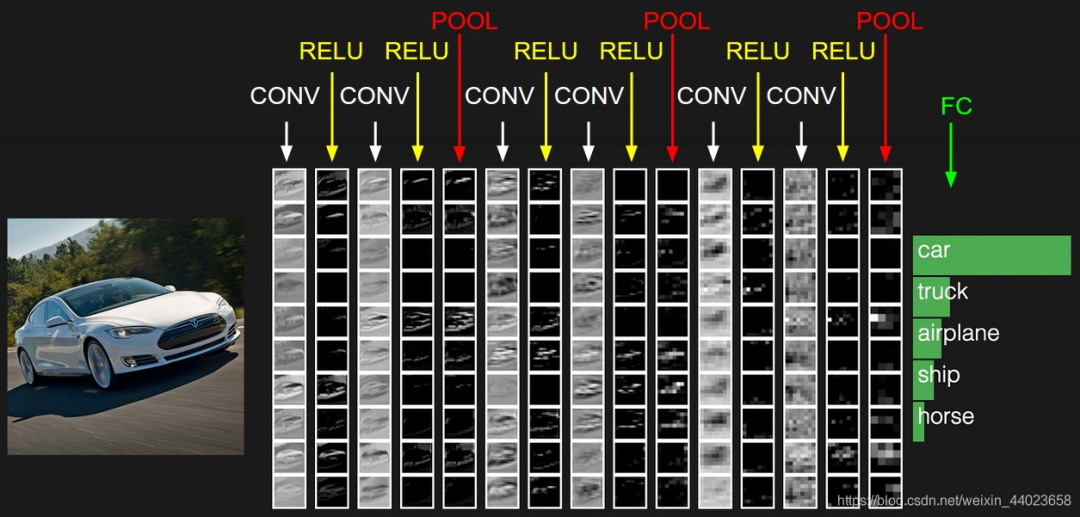 上图中CNN要做的事情是:给定一张图片,是车还是马未知,是什么车也未知,现在需要模型判断这张图片里具体是一个什么东西,总之输出一个结果:如果是车 那是什么车
上图中CNN要做的事情是:给定一张图片,是车还是马未知,是什么车也未知,现在需要模型判断这张图片里具体是一个什么东西,总之输出一个结果:如果是车 那是什么车
所以
上图从左到右依次为→
数据输入层:对数据做一些处理,比如去均值(把输入数据各个维度都中心化为0,避免数据过多偏差,影响训练效果)、归一化(把所有的数据都归一到同样的范围)、PCA/白化等等。CNN只对训练集做“去均值”这一步。
CONV:卷积计算层,线性乘积 求和。
RELU:激励层,上文2.2节中有提到:ReLU是激活函数的一种
POOL:池化层,简言之,即取区域平均或最大
FC:全连接层
这几个部分中,卷积计算层是CNN的核心,下文将重点阐述此部分。
三、CNN之卷积计算层
1、 CNN如何进行识别
简言之,当我们给定一个"X"的图案,计算机如何识别这个图案就是“X”呢?一个可能的办法就是计算机存储一张标准的“X”图案,然后把需要识别的未知图案跟标准"X"图案进行比对,如果二者一致,则判定未知图案即是一个"X"图案。
这样即便未知图案可能有一些平移或稍稍变形,依然能辨别出它是一个X图案。所以,CNN是把未知图案和标准X图案一个局部一个局部的对比,如下图所示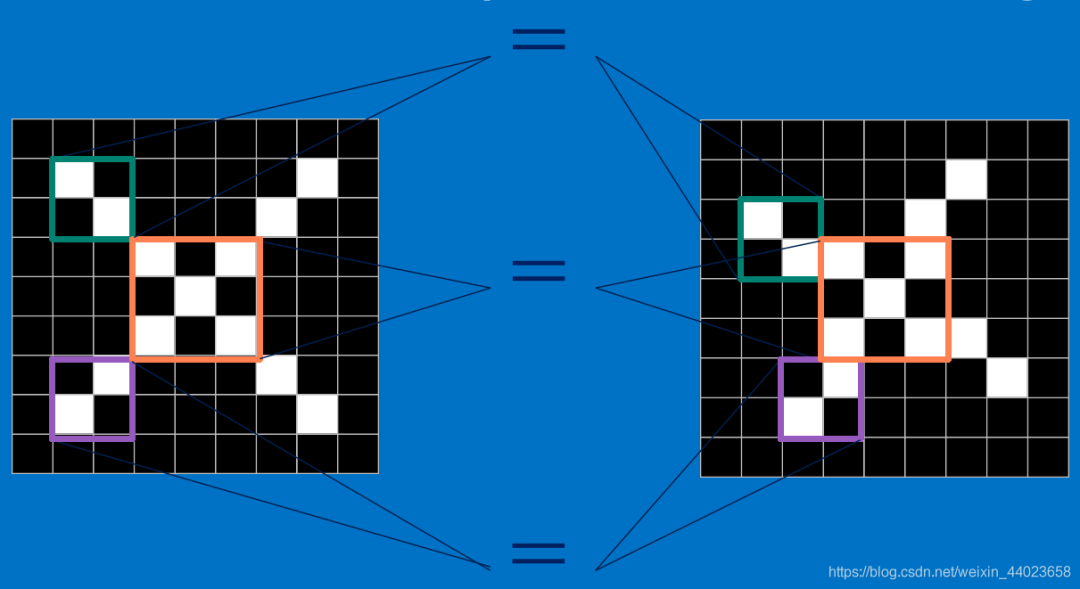 而未知图案的局部和标准X图案的局部一个一个比对时的计算过程,便是卷积操作。卷积计算结果为1表示匹配,否则不匹配。
而未知图案的局部和标准X图案的局部一个一个比对时的计算过程,便是卷积操作。卷积计算结果为1表示匹配,否则不匹配。
具体来说,为了确定一幅图像是包含有"X"还是"O",我们需要判断它是否含有"X"或者"O",并且假设必须两者选其一,不是"X"就是"O"。 理想的情况如下图所示:
理想的情况如下图所示: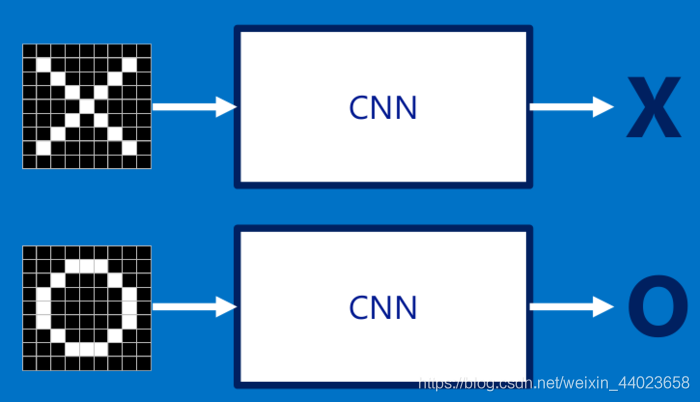 标准的"X"和"O",字母位于图像的正中央,并且比例合适,无变形
标准的"X"和"O",字母位于图像的正中央,并且比例合适,无变形
对于计算机来说,只要图像稍稍有一点变化,不是标准的,那在识别过程中就会遇到困难: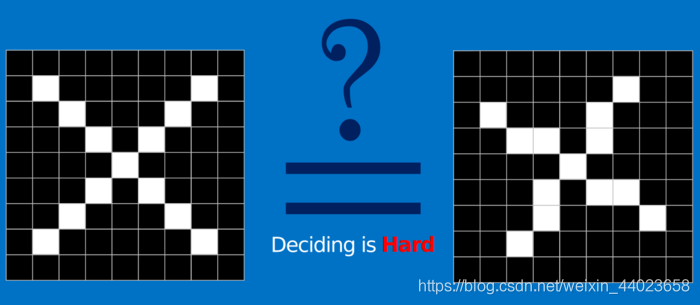 计算机要解决上面这个问题,一个比较直接的做法就是先保存一张"X"和"O"的标准图像(就像前面给出的例子),然后将其他的新给出的图像来和这两张标准图像进行对比,看看到底和哪一张图更匹配,就判断为哪个字母。
计算机要解决上面这个问题,一个比较直接的做法就是先保存一张"X"和"O"的标准图像(就像前面给出的例子),然后将其他的新给出的图像来和这两张标准图像进行对比,看看到底和哪一张图更匹配,就判断为哪个字母。
但是这么做的话,精准度较低,因为在在计算机的“视觉”中,一幅图看起来就像是一个二维的像素数组(可以想象成一个棋盘),每一个位置对应一个数字。在我们这个例子当中,像素值"1"代表白色,像素值"-1"代表黑色。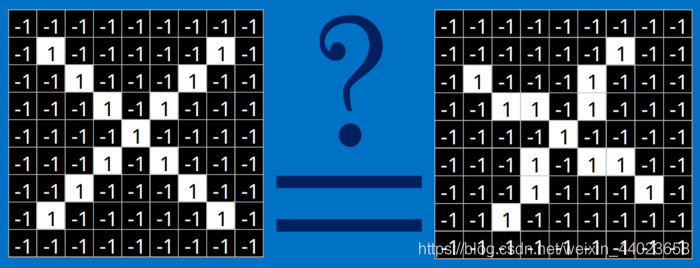 当比较两幅图的时候,如果有任何一个像素值不匹配,那么这两幅图就不匹配,至少对于计算机来说是这样的。
当比较两幅图的时候,如果有任何一个像素值不匹配,那么这两幅图就不匹配,至少对于计算机来说是这样的。
所以,上述事例中,计算机认为两幅图中的白色像素除了中间的3*3的小方格里面是相同的,其他四个角上都不同: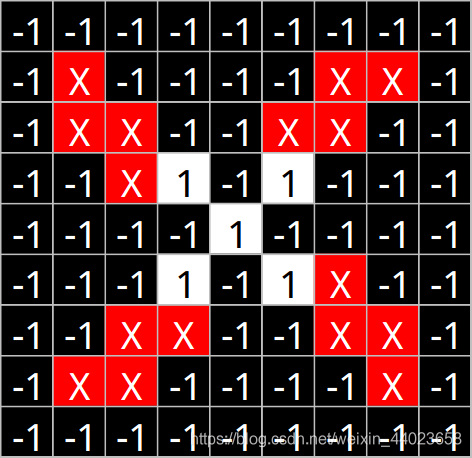
从表面上看,计算机会判别右边那幅图不是"X",两幅图不同,则得出结论: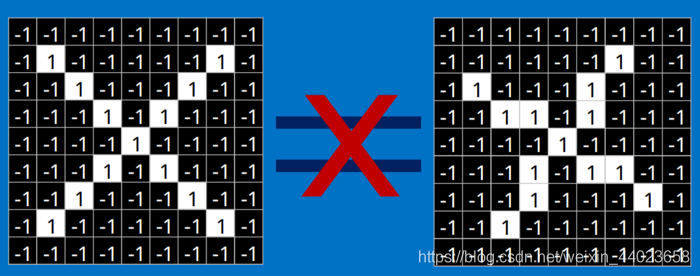 但是这么做,显得太不合理,理想的状况下,我们希望对于那些仅仅只是做了一些像平移,缩放,旋转,微变形等简单变换的图像,计算机仍然能够识别出图中的"X"和"O"。
但是这么做,显得太不合理,理想的状况下,我们希望对于那些仅仅只是做了一些像平移,缩放,旋转,微变形等简单变换的图像,计算机仍然能够识别出图中的"X"和"O"。
如下图所示,我们希望计算机依然能够很快并且很准的识别出图像: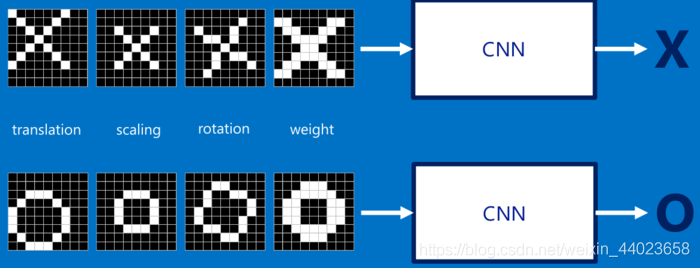 于是就有了CNN。
于是就有了CNN。
2、特征提取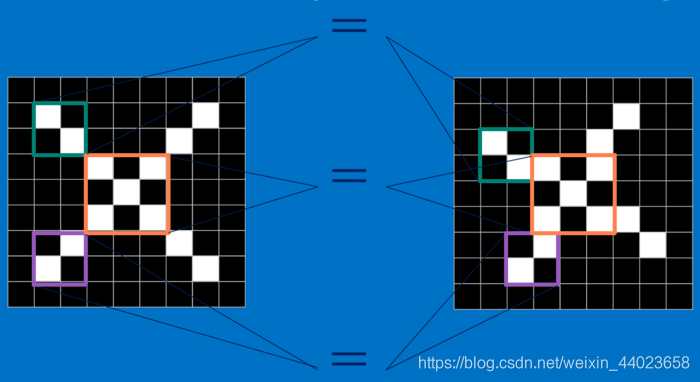 不同于计算机,对于CNN来说,是通过一块一块地来进行比对,比对的这个“小块”我们称之为Features(特征)。在两幅图中大致相同的位置找到一些粗糙的特征进行匹配,相比传统的整幅图逐一比对的方法,CNN能够更好的看到两幅图的相似性。
不同于计算机,对于CNN来说,是通过一块一块地来进行比对,比对的这个“小块”我们称之为Features(特征)。在两幅图中大致相同的位置找到一些粗糙的特征进行匹配,相比传统的整幅图逐一比对的方法,CNN能够更好的看到两幅图的相似性。
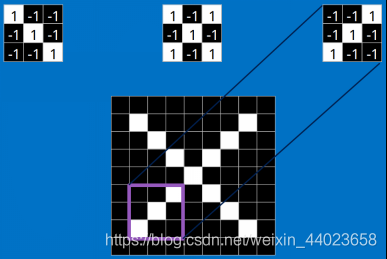
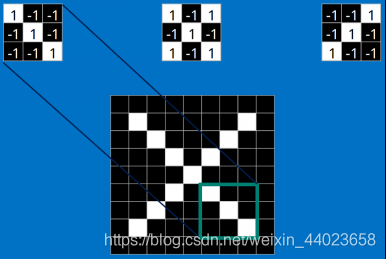
每一个feature就像是一个小图(就是一个比较小的有值的二维数组)。不同的Feature匹配图像中不同的特征。在字母"X"的例子中,那些由对角线和交叉线组成的features基本上能够识别出大多数"X"所具有的重要特征。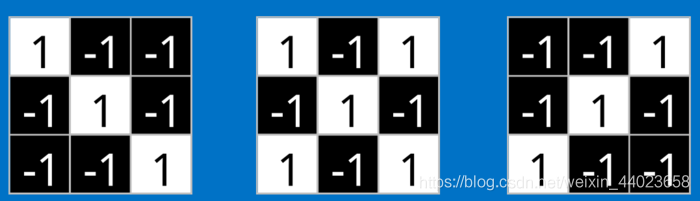 这些features很有可能就是匹配任何含有字母"X"的图中字母X的四个角和它的中心。那么具体到底是怎么匹配的呢?如下所示:
这些features很有可能就是匹配任何含有字母"X"的图中字母X的四个角和它的中心。那么具体到底是怎么匹配的呢?如下所示:
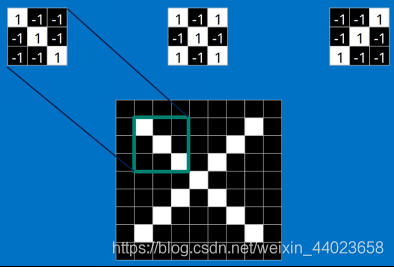
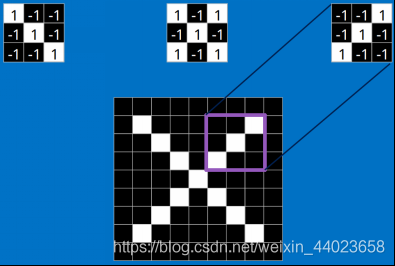
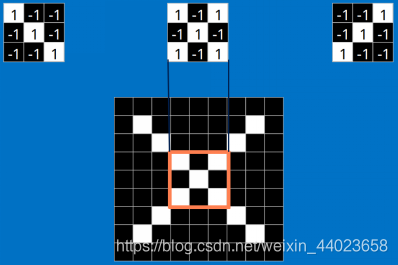
看到这里是不是已经有了一些头绪,但其实目前只是第一步,现在知道了这些Features是怎么在原图上面进行匹配的,但是还不知道如何通过Features进行数学计算,比如这个下面3*3的小块到底如何计算的。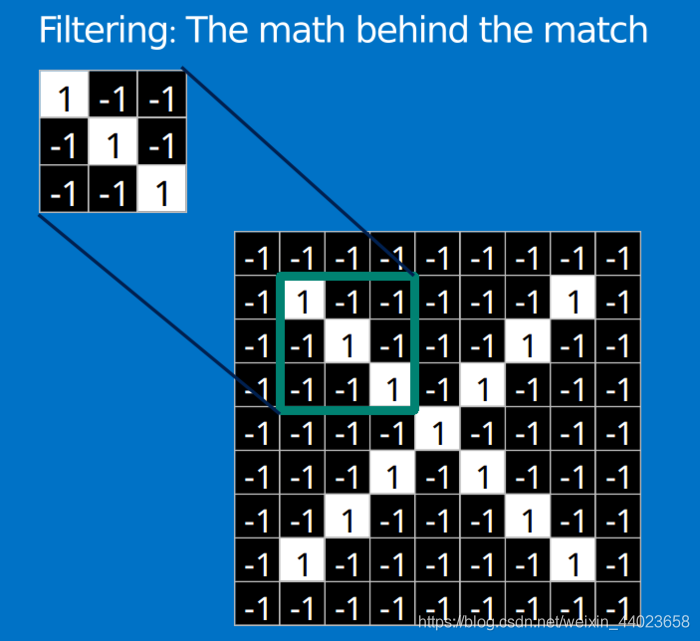 这里面的数学操作,就是我们常说的“卷积”操作。
这里面的数学操作,就是我们常说的“卷积”操作。
下面会介绍卷积操作的详细步骤。
2、什么是卷积
对图像(不同的数据窗口数据)和滤波矩阵(一组固定的权重:因为每个神经元的多个权重固定,所以又可以看做一个恒定的滤波器filter)做内积(逐个元素相乘再求和)的操作就是所谓的『卷积』操作,也是卷积神经网络的名字来源。
非严格意义上来讲,下图中红框框起来的部分便可以理解为一个滤波器,即带着一组固定权重的神经元。多个滤波器叠加成了卷积层。
举个具体的例子,比如下图中,图中左边部分是原始输入数据,图中中间部分是滤波器filter,图中右边是输出的新的二维数据。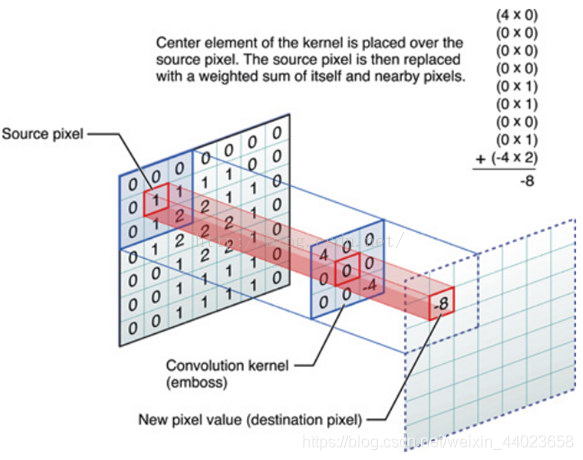 中间滤波器filter与数据窗口做内积,其具体计算过程则是:40 + 00 + 00 + 00 + 01 + 01 + 00 + 01 + -4*2 = -8
中间滤波器filter与数据窗口做内积,其具体计算过程则是:40 + 00 + 00 + 00 + 01 + 01 + 00 + 01 + -4*2 = -8
3、 图像上的卷积
在下图对应的计算过程中,输入是一定区域大小(width*height)的数据,和滤波器filter(带着一组固定权重的神经元)做内积后等到新的二维数据。
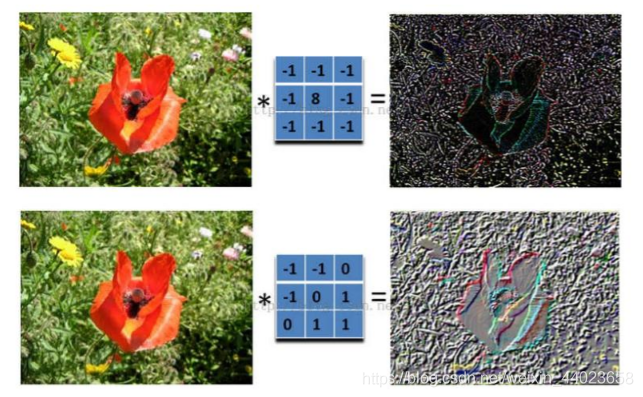
左边是图像输入,中间部分就是滤波器filter(带着一组固定权重的神经元),不同的滤波器filter会得到不同的输出数据,比如颜色深浅、轮廓。相当于如果想提取图像的不同特征,则用不同的滤波器filter,提取想要的关于图像的特定信息:颜色深浅或轮廓。
如下图所示:
 4、 动态卷积图演示
4、 动态卷积图演示
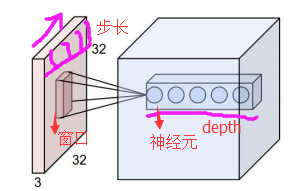
在CNN中,滤波器filter(带着一组固定权重的神经元)对局部输入数据进行卷积计算。每计算完一个数据窗口内的局部数据后,数据窗口不断平移滑动,直到计算完所有数据。这个过程中,有这么几个参数:
a. 深度depth:神经元个数,决定输出的depth厚度。同时代表滤波器个数。
b. 步长stride:决定滑动多少步可以到边缘。
c.填充值zero-padding:在外围边缘补充若干圈0,方便从初始位置以步长为单位可以刚好滑倒末尾位置,通俗地讲就是为了总长能被步长整除。
cs231n课程中有一张卷积动图,如下图所示: 通过上图我们可以看到:
通过上图我们可以看到:
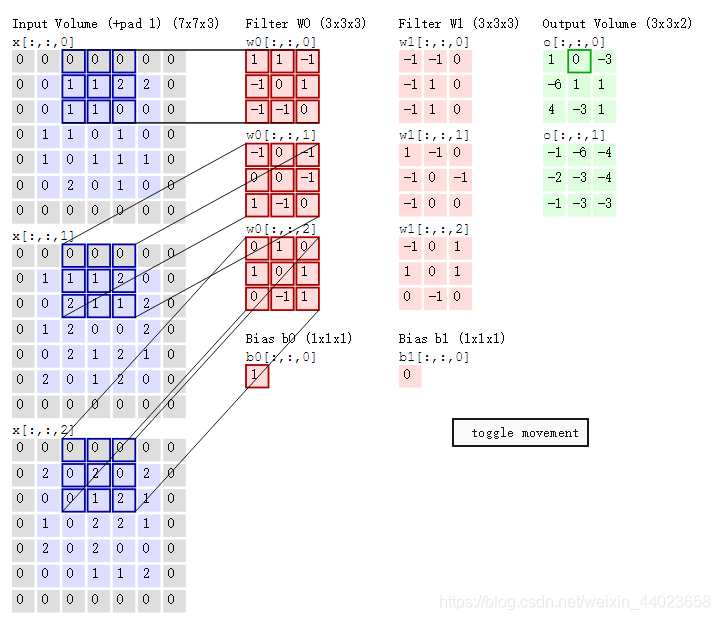
两个神经元,即depth=2,意味着有两个滤波器。数据窗口每次移动两个步长取3*3的局部数据,即stride=2;zero-padding=1,然后分别以两个滤波器filter为轴滑动数组进行卷积计算,得到两组不同的结果。
如果初看上图,可能不一定能马上理解,但结合上文的内容后,便可以更清晰的理解其含义。
左边是输入(773中,7*7代表图像的像素/长宽,3代表R、G、B 三个颜色通道),中间部分是两个不同的滤波器Filter w0、Filter w1,最右边则是两个不同的输出。
随着左边数据窗口的平移滑动,滤波器Filter w0 / Filter w1对不同的局部数据进行卷积计算。值得一提的是,左边数据在变化,每次滤波器都是针对某一局部的数据窗口进行卷积,这就是所谓的CNN中的局部感知机制。
举个例子,滤波器就像一双眼睛,人类视角有限,一眼望去,只能看到这世界的局部。如果一下子接受全世界所有信息,大脑会接收不过来。当然,即便是看局部,针对局部里的信息人类双眼也是有偏重、偏好的,会根据自己的兴趣爱好进行输入的权重的分配。
与此同时,数据窗口滑动,导致输入在变化,但中间滤波器Filter w0的权重(即每个神经元连接数据窗口的权重)是固定不变的,这个权重不变即所谓的CNN中的参数(权重)共享机制。
再举个例子,某人环游全世界,所看到的信息在变,但采集信息的双眼不变,另外不同人的双眼 看同一个局部信息
所感受到的不同,即一千个读者有一千个哈姆雷特,所以不同的滤波器 就像不同的双眼,不同的人有着不同的反馈结果。
我第一次看到上面这个动态图的时候,只觉得很炫,另外就是只初步了解计算过程是“相乘后相加”,但到底具体是个怎么相乘后相加的计算过程变不得而知,后续通过学习后才有了更深入的了解。
下面我们就来详细说明下其计算步骤。
首先,我们将上述动图进行分解,如下图
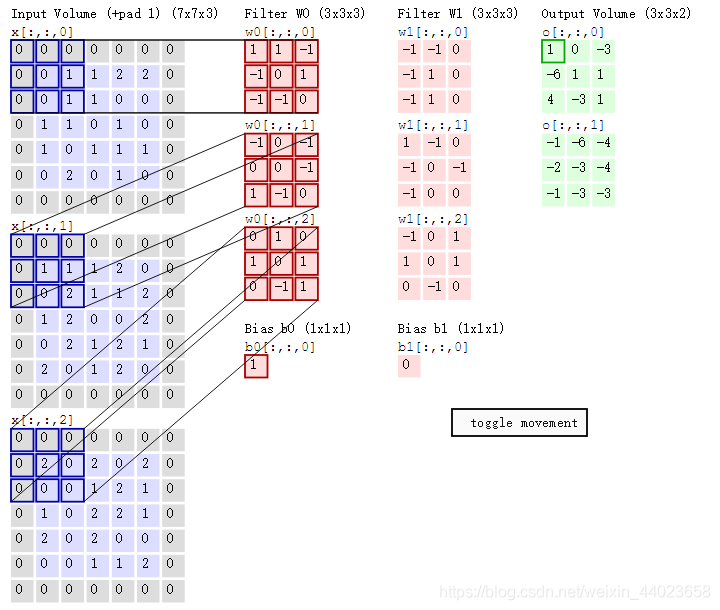
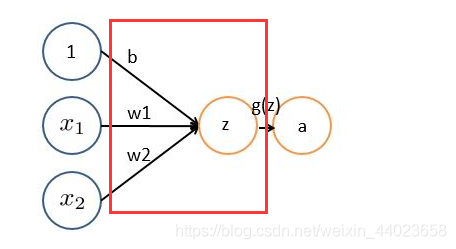
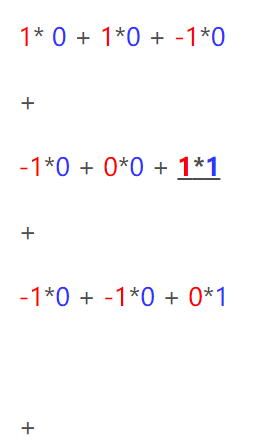
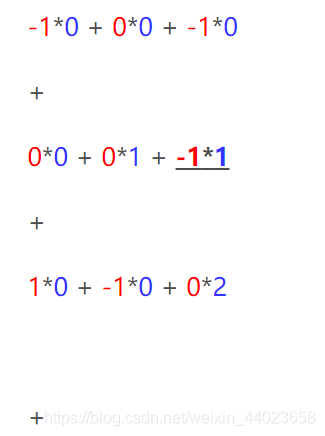
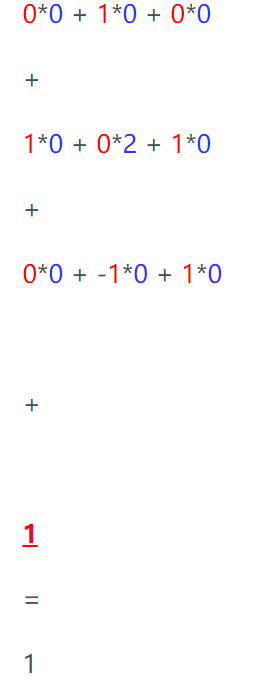
其次,我们细究下上图的具体计算过程。即上图中的输出结果1具体是怎么计算得到,其原理类似wx + b,w对应滤波器Filter w0,x对应不同的数据窗口,b对应Bias b0,相当于滤波器Filter w0与一个个数据窗口相乘再求和后,最后加上Bias b0得到输出结果1,具体过程如下过程所示:






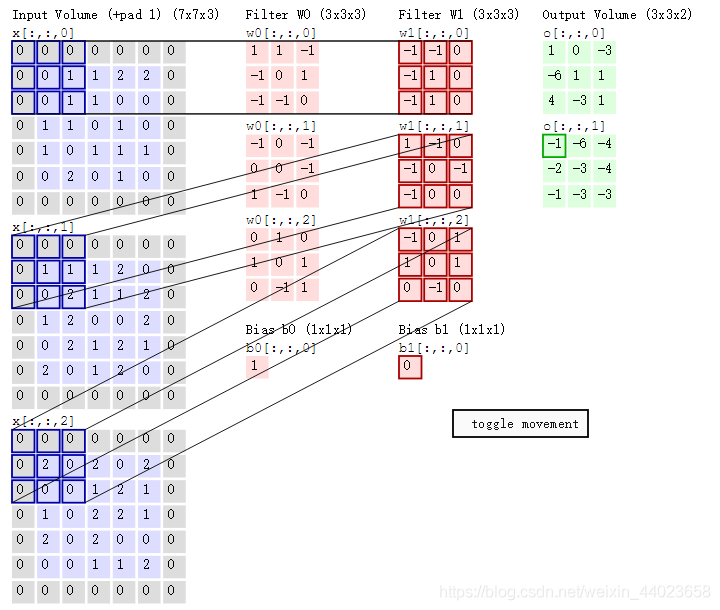
然后滤波器Filter w0固定不变,数据窗口向右移动2步,继续做内积计算,得到0的输出结果
最后,换做另外一个不同的滤波器Filter w1、不同的偏置Bias b1,再跟图中最左边的数据窗口做卷积,可得到另外一个不同的输出。
以上就是CNN在图像上进行的卷积的整个计算过程。
四、 CNN之激励层,池化层,全连接层
1、 ReLU激励层
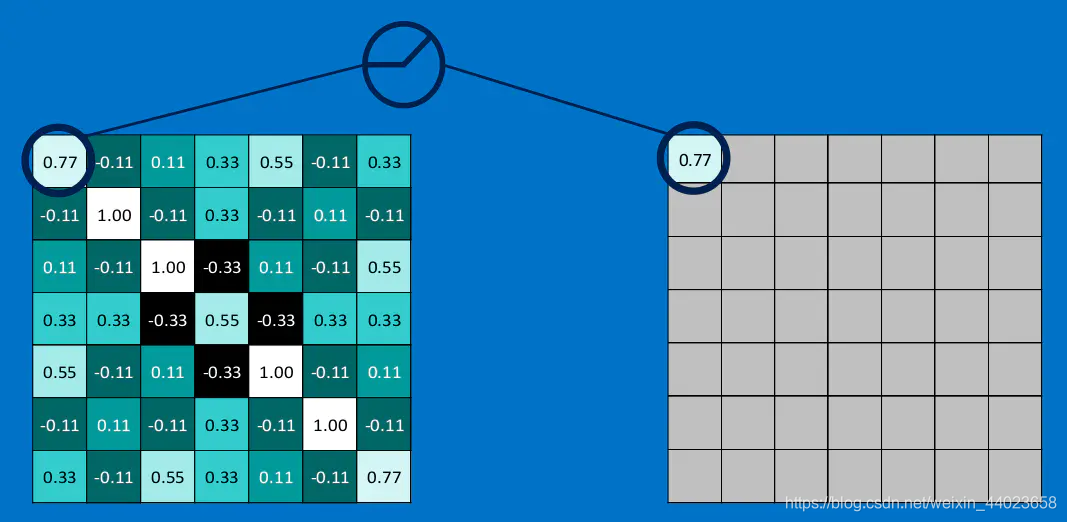
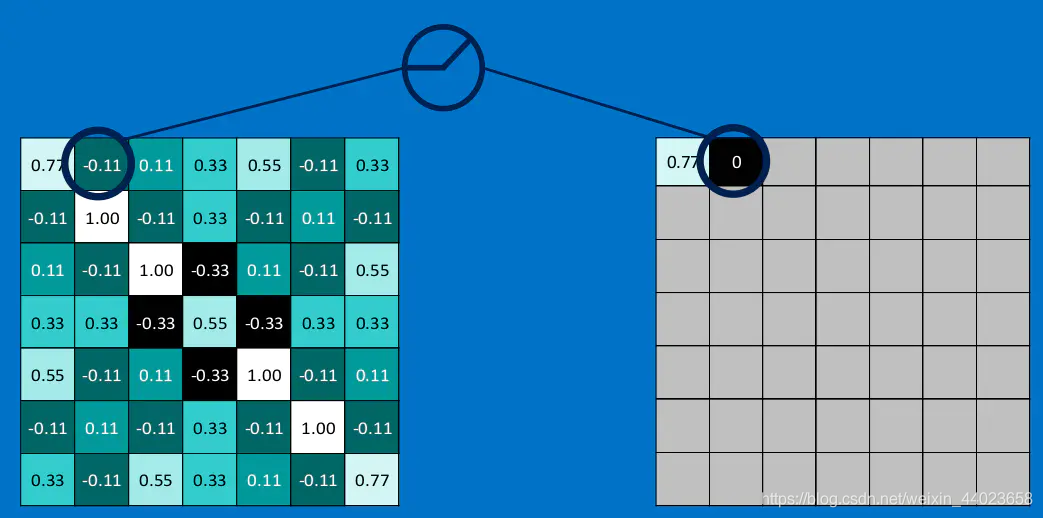
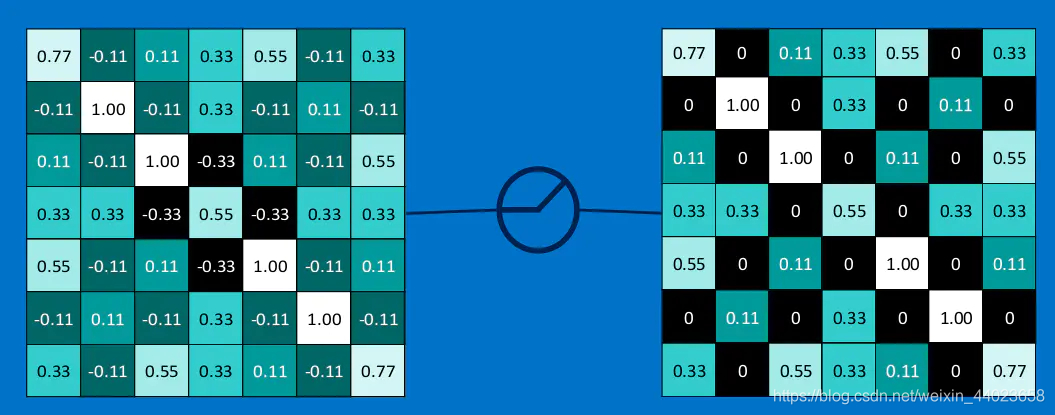
第一节俩篇博客介绍了激活函数sigmoid,但实际梯度下降中,sigmoid容易饱和、造成终止梯度传递,且没有0中心化。咋办呢,可以尝试另外一个激活函数:ReLU,其图形表示如下图所示:
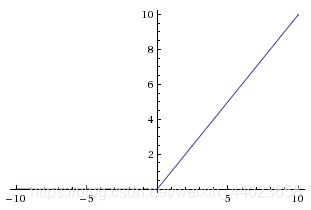
对于输入的负值,输出全为0,对于正值,原样输出。
下图演示了本文的例子中relu激活函数具体操作:
我们将上面所提到的卷积,池化,激活放在一起,于是形成下面这个样子: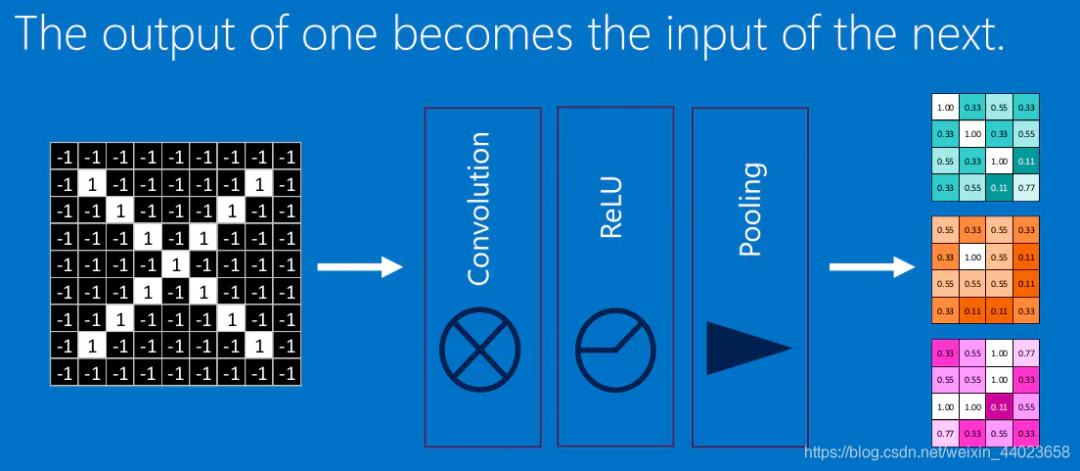 然后,我们加大网络的深度,增加更多的层,就可以得到深度神经网络了:
然后,我们加大网络的深度,增加更多的层,就可以得到深度神经网络了: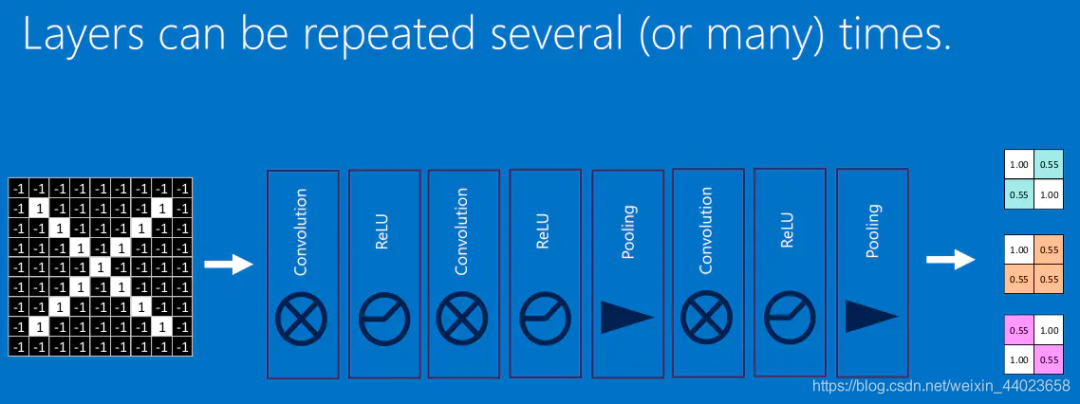
2、 池化pool层
前面提到,池化,简言之,即取区域平均或最大,如下图所示,CNN中使用的另一个有效的工具被称为“池化(Pooling)”。池化可以将一幅大的图像缩小,同时又保留其中的重要信息。池化就是将输入图像进行缩小,减少像素信息,只保留重要信息。通常情况下,池化都是22大小,比如对于max-pooling来说,就是取输入图像中22大小的块中的最大值,作为结果的像素值,相当于将原始图像缩小了4倍。(注:同理,对于average-pooling来说,就是取2*2大小块的平均值作为结果的像素值。)
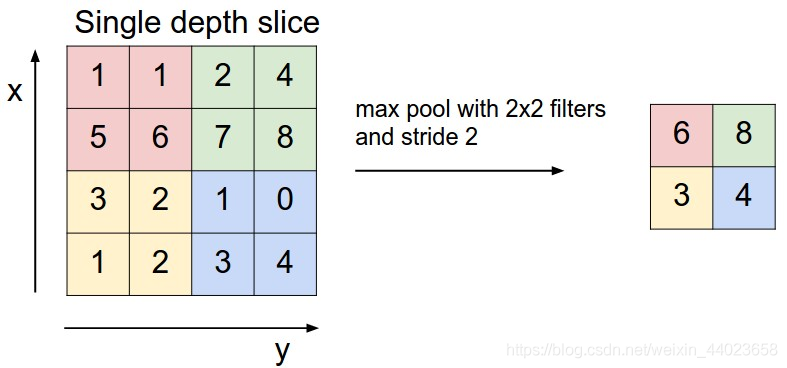 上图所展示的是取区域最大,即上图左边部分中 左上角2x2的矩阵中6最大,右上角2x2的矩阵中8最大,左下角2x2的矩阵中3最大,右下角2x2的矩阵中4最大,所以得到上图右边部分的结果:6 8 3 4。
上图所展示的是取区域最大,即上图左边部分中 左上角2x2的矩阵中6最大,右上角2x2的矩阵中8最大,左下角2x2的矩阵中3最大,右下角2x2的矩阵中4最大,所以得到上图右边部分的结果:6 8 3 4。
3、全连接层(Fully connected layers)
全连接层(fully connected layers,FC)在整个卷积神经网络中起到“分类器”的作用。如果说卷积层、池化层和激活函数层等操作是将原始数据映射到隐层特征空间的话,全连接层则起到将学到的分布式特征映射到样本标记空间的作用。
全连接层计算过程中,首先需要在前层的卷积层中采样下来,并把分布式特征进行分类
然后在这些特征中找到与x和o强相关的特征进行分类,
通过卷积计算分别得出x、o对应的结果:
从下图中可以看出,根据以上计算可了解到最终判定为"X",所以最终结果为X: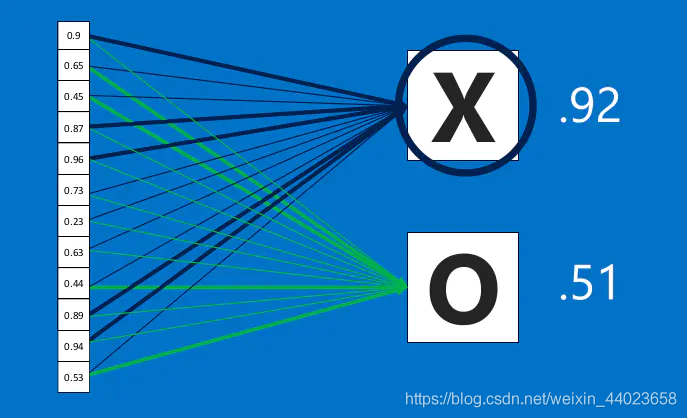
在这个过程中,我们定义这一系列操作为”全连接层“(Fully connected layers):全连接层可以通过增加宽度和长度影响模型的参数,如下图所示:
所有的层级以及计算得出结果的过程便是卷积神经网络的基本原理。
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!