
万字长文,值得收藏/参考的OpenCV C++基础代码
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自|OpenCV学堂
01
环境搭建
环境配置了一个早上,到10.48分配置完毕,有点难受。还好最后显示出第一张图片。
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("D:/images/011.jpg",IMREAD_GRAYSCALE);//读取进来的数据以矩阵的形势,第二个参数代表显示一张灰度图像。
if (src.empty())
{
printf("could not load image");//如果图片不存在 将无法读取,打印到终端。
}
//超过屏幕的图像无法显示时候调用此函数。
namedWindow("输入窗口", WINDOW_FREERATIO);//创建了一个新窗口,参数1表示名称,第二个参数代表一个自由的比例
imshow("输入窗口", src);//表示显示在新创建的输入窗口上,第一个参数表示窗口名称,src表示数据对象Mat
waitKey(0);//执行到这句,程序阻塞。参数表示延时时间。单位ms
destroyAllWindows();//销毁前面创建的显示窗口
return 0;
}第一节课介绍了如何读取第一张图片,并且显示出来,通过调用imread函数读取照片,再调用imshow显示图片到窗口。同时,讲述了如何打印灰度图像,图片读取失败的处理方式,代码注释详细介绍了每条语句的意思。
02
显示图象
1、色彩空间转换函数 cvtColor
2、图像的保存
#include<opencv2/opencv.hpp>
using namespace cv;
class QuickDemo //创建一个QuickDemo对象
{
public:
void colorSpace_Demo(Mat &imge); //定义一个类,里面包含输入一个图片,对图片操作
};
#include<quickopencv.h>
void QuickDemo::colorSpace_Demo(Mat &image)
{
Mat gray, hsv;//定义2个矩阵类的图像gray和hsv,
cvtColor(image,hsv,COLOR_BGR2HSV);//图像转换函数,可以把image转成hsv,第三个参数是转成的类型
cvtColor(image,gray,COLOR_BGR2GRAY);//图像转换函数,可以把image转成hsv,第三个参数是转成的类型
imshow("HSV",hsv);
imshow("灰度",gray);
imwrite("D:/hsv.jpg",hsv);//保存图片,前面是保存图的地址,后面是保存图的名称
imwrite("D:/gray.jpg",gray);
}
#include<opencv2/opencv.hpp>
#include<iostream>
#include<quickopencv.h>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("D:/images/1.jpg",IMREAD_ANYCOLOR);//B,G,R实际上0-255三色。3通道
//读取进来的数据以矩阵的形势,第二个参数代表显示一张灰度图像。
if (src.empty())
{
printf("could not load image");//如果图片不存在 将无法读取,打印到终端。
return -1;
}
//超过屏幕的图像无法显示时候调用此函数。
namedWindow("输入窗口", WINDOW_FREERATIO);//创建了一个新窗口,参数1表示名称,第二个参数代表一个自由的比例
imshow("输入窗口", src);//表示显示在新创建的输入窗口上,第一个参数表示窗口名称,src表示数据对象Mat
//在主函数中调用之前创建的类对象
QuickDemo qd;
qd.colorSpace_Demo(src);
waitKey(0);//执行到这句,程序阻塞。参数表示延时时间。单位ms
destroyAllWindows();//销毁前面创建的显示窗口
return 0;
}这节主要介绍了创建一个类对象,然后通过类对象调用函数,在main主函数中进行调用实现类对象中的功能,比如转换成HSV类型图片和GRAY类型图片,最后通过imwrite函数进行图像的保存。
03
图像对象的创建与赋值
1、怎么操作mat
2、怎么访问每一个像素点
3、怎么创建一个空图或者mat
void QuickDemo::mat_creation_demo(Mat &image)
{
Mat m1, m2;
m1 = image.clone();
image.copyTo(m2);
//创建空白图像
Mat m3 = Mat::ones(Size(400, 400), CV_8UC3);//创建8*8的CV8位的无符号的n通道的unsigned char
//ones&zeros是初始化的方法
m3 = Scalar(255, 0, 0);//给三个通道都赋值127 ,单通道赋值方法 m3 = 127;
//m3初始为蓝色
//数据的宽度和长度是由通道数决定的。
//std::cout << "width:"<<m3.cols<<"height"<< m3.rows <<"channels"<<m3.channels()<< std::endl;
//用来查看宽度,高度与通道数。
/*std::cout << m3 << std::endl;*/
Mat m4 = m3.clone();//赋值M4就是M3 M4改变了,M3也改变了,没有产生新的自我(M4与M3同体)
//M4为M3的克隆,M3还是原来的颜色,不会改变。(M4与M3不同体,各自是各自的颜色)
//m3.copyTo(m4);//把M3赋值给M4,M4就是蓝色
m4 = Scalar(0, 255, 255);//改变m4的颜色为黄色 ,m4也改变
imshow("图像3", m3);//标题和图像名称 显示图像m3 纯蓝色
imshow("图像4", m4);//标题和图像名称
}本节课介绍了如何创建一个Mat对象,通过创建新的Mat对象来创建用户的特定的底色画布,创建图像的基本类型有两种一种是ones一种是zeros,ones()中的第一个参数代表图像的大小,第二个参数代表创建几维的图像,UC代表无符号字符型,数组3代表通道数。克隆和赋值的区别,克隆就是产生一个新的对象,新对象改变属性,旧对象属性不变(各自为政)。赋值是二者同体,当新属性发生改变,旧属性也发生改变(二者同体)。
04
图像像素的读写操作
如何遍历和修改每个像素点的数值,分为单通道和多通道。访问模式模式也有两种。第一种是数组访问模式,用最常规的数组下标访问像素值。
void QuickDemo::pixel_visit_demo(Mat &image)
{
int dims = image.channels();
int h = image.rows;
int w = image.cols;
for (int row = 0; row < h; row++)
{
for (int col = 0; col < w; col++)
{
if (dims == 1) //单通道的灰度图像
{
int pv = image.at<uchar>(row, col);//得到像素值
image.at<uchar>(row, col) = 255 - pv;//给像素值重新赋值
}
if (dims == 3) //三通道的彩色图像
{
Vec3b bgr = image.at<Vec3b>(row, col); //opencv特定的类型,获取三维颜色,3个值
image.at<Vec3b>(row, col)[0] = 255 - bgr[0];
image.at<Vec3b>(row, col)[1] = 255 - bgr[1];
image.at<Vec3b>(row, col)[2] = 255 - bgr[2];//对彩色图像读取它的像素值,并且对像素值进行改写。
}
}
}
namedWindow("像素读写演示", WINDOW_FREERATIO);
imshow("像素读写演示", image);
}第二种为指针访问模式,指定一个指针为图片的首地址,通过循环遍历,指针++,一次往后推。
void QuickDemo::pixel_visit_demo(Mat &image)
{
int dims = image.channels();
int h = image.rows;
int w = image.cols;
for (int row = 0; row < h; row++)
{
uchar *current_row = image.ptr<uchar>(row);
for (int col = 0; col < w; col++)
{
if (dims == 1) //单通道的灰度图像
{
int pv = *current_row;//得到像素值
*current_row++ = 255 - pv;//给像素值重新赋值
}
if (dims == 3) //三通道的彩色图像
{
*current_row++ = 255 - *current_row; //指针每做一次运算,就向后移动一位
*current_row++ = 255 - *current_row;
*current_row++ = 255 - *current_row;
}
}
}
namedWindow("像素读写演示", WINDOW_FREERATIO);
imshow("像素读写演示", image);
}本节主要介绍了通过两种遍历的方式访问图像的像素值,并且改变图像的像素值。
05
图像像素的操作
对图像的各个像素点实现加减乘除的操作。介绍了常用的除爆函数saturate_cast,防止数值过界。
void QuickDemo::operators_demo(Mat &image)
{
Mat dst = Mat::zeros(image.size(), image.type());
Mat m = Mat::zeros(image.size(), image.type());
dst = image - Scalar(50, 50, 50);
m = Scalar(50, 50, 50);
multiply(image,m,dst);//乘法操作 api
imshow("乘法操作", dst);
add(image, m, dst);//加法操作 api
imshow("加法操作", dst);
subtract(image, m, dst);//减法操作 api
imshow("减法操作", dst);
divide(image, m, dst);//除法操作 api
namedWindow("加法操作", WINDOW_FREERATIO);
imshow("加法操作", dst);
//加法操作底层
int dims = image.channels();
int h = image.rows;
int w = image.cols;
for (int row = 0; row < h; row++)
{
for (int col = 0; col < w; col++)
{
Vec3b p1 = image.at<Vec3b>(row, col); //opencv特定的类型,获取三维颜色,3个值
Vec3b p2 = m.at<Vec3b>(row, col);
dst.at<Vec3b>(row, col)[0] = saturate_cast<uchar>(p1[0] + p2[0]);//saturate_cast用来防爆,小于0就是0,大于255就是255
dst.at<Vec3b>(row, col)[1] = saturate_cast<uchar>(p1[1] + p2[1]);
dst.at<Vec3b>(row, col)[2] = saturate_cast<uchar>(p1[2] + p2[2]);//对彩色图像读取它的像素值,并且对像素值进行改写。
}
}
imshow("加法操作", dst);
}介绍了四种不同的API实现,并且演示了一种加法的算法。
06
滚动条演示操作-调整图片亮度
本节介绍怎么通过createTrackbar来设置一个进度条,实现图片的亮度调节。
Mat src, dst, m;
int lightness = 50;//定义初始的亮度为50
static void on_track(int ,void*)
{
m = Scalar(lightness,lightness,lightness);//创建调整亮度的数值
subtract(src, m, dst);//定义亮度变化为减
imshow("亮度调整", dst);//显示调整亮度之后的图片
}
void QuickDemo::tracking_bar_demo(Mat &image)
{
namedWindow("亮度调整",WINDOW_AUTOSIZE);
dst = Mat::zeros(image.size(), image.type());//图片的初始化创建一个和image大小相等,种类相同的图像
m = Mat::zeros(image.size(), image.type());//图片的初始化创建一个和image大小相等,种类相同的图像
src = image;//给src赋值
int max_value = 100;//定义最大值为100
createTrackbar("Value Bar:", "亮度调整", &lightness, max_value,on_track);//调用函数实现功能。
on_track(50, 0);
}07
滚动条演示操作-传递参数
无类型指针类型转换与参数传递!
static void on_lightness(int b ,void* userdata)
{
Mat image = *((Mat*)userdata);
Mat dst = Mat::zeros(image.size(), image.type());
Mat m = Mat::zeros(image.size(), image.type());
m = Scalar(b,b,b);
addWeighted(image,1.0,m,0,b,dst);//融合两张图
imshow("亮度&对比度调整", dst);
}
static void on_contrast(int b, void* userdata)
{
Mat image = *((Mat*)userdata);
Mat dst = Mat::zeros(image.size(), image.type());
Mat m = Mat::zeros(image.size(), image.type());
double contrast = b / 100.0;
addWeighted(image, contrast, m, 0.0, 0, dst);//融合两张图
imshow("亮度&对比度调整", dst);
}
void QuickDemo::tracking_bar_demo(Mat &image)
{
namedWindow("亮度&对比度调整",WINDOW_AUTOSIZE);
int lightness = 50;
int max_value = 100;
int contrast_value = 100;
createTrackbar("Value Bar:", "亮度&对比度调整", &lightness, max_value, on_lightness,(void*)(&image));
createTrackbar("Contrast Bar:", "亮度&对比度调整", &contrast_value, 200, on_contrast, (void*)(&image));
on_lightness(50, &image);
}08
键盘响应操作
本节介绍通过键盘输入,终端能够读取响应的信息。
void QuickDemo::key_demo(Mat &image)
{
Mat dst= Mat::zeros(image.size(), image.type());
while (true)
{
char c = waitKey(100);//停顿100ms 做视频处理都是1
if (c == 27) { //esc 退出应用程序
break;
}
if (c == 49)//key#1
{
std::cout <<"you enter key #1" << std::endl;
cvtColor(image, dst, COLOR_BGR2GRAY);
}
if (c == 50)//key#1
{
std::cout << "you enter key #2" << std::endl;
cvtColor(image, dst, COLOR_BGR2HSV);
}
if (c == 51)//key#1
{
std::cout << "you enter key #3" << std::endl;
dst = Scalar(50, 50, 50);
add(image,dst,dst);
}
imshow("键盘响应",dst);
std::cout << c << std::endl;
}
}通过键盘输入,在终端得到响应,输入不同的键值,得到不一样的结果。
09
opencv自带颜色操作
void QuickDemo::color_style_demo(Mat &image)
{
int colormap[] = {
COLORMAP_AUTUMN ,
COLORMAP_BONE,
COLORMAP_CIVIDIS,
COLORMAP_DEEPGREEN,
COLORMAP_HOT,
COLORMAP_HSV,
COLORMAP_INFERNO,
COLORMAP_JET,
COLORMAP_MAGMA,
COLORMAP_OCEAN,
COLORMAP_PINK,
COLORMAP_PARULA,
COLORMAP_RAINBOW,
COLORMAP_SPRING,
COLORMAP_TWILIGHT,
COLORMAP_TURBO,
COLORMAP_TWILIGHT,
COLORMAP_VIRIDIS,
COLORMAP_TWILIGHT_SHIFTED,
COLORMAP_WINTER
};
Mat dst;
int index = 0;
while (true)
{
char c = waitKey(100);//停顿100ms 做视频处理都是1
if (c == 27) { //esc 退出应用程序
break;
}
if (c == 49)//key#1 按下按键1时,保存图片到指定位置
{
std::cout << "you enter key #1" << std::endl;
imwrite("D:/gray.jpg", dst);
}
applyColorMap(image, dst, colormap[index%19]);//循环展示19种图片
index++;
imshow("循环播放", dst);
}
}伪色彩填充与颜色表匹配
10
图像像素的逻辑操作
本节介绍如何对图像的像素进行操作,包括与、或、非、异或,矩形在图像中的绘制。
void QuickDemo::bitwise_demo(Mat &image)
{
Mat m1 = Mat::zeros(Size(256,256),CV_8UC3);
Mat m2 = Mat::zeros(Size(256,256),CV_8UC3);
rectangle(m1,Rect(100,100,80,80),Scalar(255,255,0),-1,LINE_8,0);//小于0表示填充,大于0表示绘制
rectangle(m2,Rect(150,150,80,80), Scalar(0,255,255), -1, LINE_8, 0);
imshow("m1", m1);
imshow("m2", m2);
Mat dst;
bitwise_and(m1, m2, dst);//位操作与
bitwise_or(m1, m2, dst);//位操作或
bitwise_not(image, dst);//取反操作
bitwise_xor(m1, m2, dst);//异或操作
imshow("像素位操作", dst);
}rectangle(m1,Rect(100,100,80,80),Scalar(255,255,0),-1,LINE_8,0);这个函数参数1是图片名称,参数2是矩形的起始&末尾位置,参数3 Scalar表示将要绘制图像的颜色,参数4表示小于0表示填充,大于0表示绘制,参数5表示四邻域或者八邻域的绘制,参数6表示中心坐标或者半径坐标的小数位数。
11
通道的分离与合并
本节介绍如何把不同的通道给分离,归并,使得能显现出来不同的通道颜色。
void QuickDemo::channels_demo(Mat &image)
{
std::vector<Mat>mv;
split(image, mv);
//imshow("蓝色", mv[0]);
//0,1,2三个通道分别代表BGR。
//关闭2个通道意味着开启一个通道。
//imshow("绿色", mv[1]);
//imshow("红色", mv[2]);
Mat dst;
mv[0] = 0;
mv[2] = 0;
merge(mv, dst);
imshow("蓝色", dst);
int from_to[] = { 0,2,1,1,2,0 };
//把通道相互交换,第0->第2,第一->第一,第二->第0
mixChannels(&image,1,&dst,1,from_to,3);//3表示3个通道
//参数1指针引用图像->参数2引用到dst
imshow("通道混合", dst);
}M[0],M[1],M[2]分别代表BGR个不同的通道。要开启某个通道只需要关闭另外的一个通道即可。第二个内容为通道的合并,将不同通道的像素值进行转换操作,使图片呈现出不同的效果。
12
图像色彩空间转换
本节内容实现任务是提取任务的轮廓,首先把RGB色彩空间的图片转换到HSV空间中,其次,提取图片的mask,通过使用inrangle提取hsv色彩空间的颜色。HSV色彩空间的颜色
void QuickDemo::inrange_demo(Mat &image)
{
Mat hsv;
cvtColor(image, hsv, COLOR_BGR2HSV);
Mat mask;
inRange(hsv,Scalar(35,43,46),Scalar(77,255,255),mask);
//35,43,46根据图片中绿色最低来确定最小值。
//77,255,255 提取
//参数1低范围,参数2高范围
//将hsv中的由低到高的像素点提取出来并且存储到mask当中。
imshow("mask",hsv);
Mat redback = Mat::zeros(image.size(), image.type());
redback = Scalar(40, 40, 200);
bitwise_not(mask, mask);
imshow("mask", mask);
image.copyTo(redback, mask);//把redback复制到mask,mask通过inRange得到。
imshow("roi提取", hsv);
}13
图像像素值统计
分别定义双精度型变量 minv和maxv。指针变量minLoc,maxLoc;因为这图片是多通道的,所以使用一个容器装取数值,并且用split分离图片到MV中通过for循环操作,遍历图片信息,并且打印信息到终端。图像信息包括,方差,均值,大小。
void QuickDemo::pixel_statistic_demo(Mat &image)
{
double minv, maxv;//定义最值
Point minLoc, maxLoc;//定义最值地址
std::vector<Mat>mv;//mv是一个Mat类型的容器 装在这个容器内
split(image, mv);
for (int i = 0; i < mv.size(); i++)
{
//分别打印各个通道的数值
minMaxLoc(mv[i], &minv, &maxv, &minLoc, &maxLoc, Mat());//求出图像的最大值和最小值。
std::cout <<"No.channels:"<<i<<"minvalue:" << minv << "maxvalue:" << maxv << std::endl;
}
Mat mean, stddev;
meanStdDev(image, mean, stddev);//求出图像的均值和方差
std::cout << "mean:" << mean << std::endl;
std::cout << "stddev:" << stddev << std::endl;
}14
图像几何形状的绘制
本节课介绍如何绘制椭圆,矩形,直线,圆等
void QuickDemo::drawing_demo(Mat &image)
{
Rect rect;
rect.x = 200;
rect.y = 200;
rect.width = 100;
rect.height = 100;
Mat bg = Mat::zeros(image.size(),image.type());
rectangle(image, rect, Scalar(0, 0, 255), -1, 8, 0);
//参数1为绘图的底图或者画布名称,参数2位图片的起始,宽度,高度
//参数3代表填充颜色。参数4大于0是线小于0是填充
//参数5表示邻域填充,参数6默认值为0
circle(bg, Point(350, 400), 15, Scalar(0, 0, 255), 2, LINE_AA, 0);
//参数2位图片中心位置,参数3为半径为15的圆
Mat dst;
//addWeighted(image, 0.7, bg, 0.3, 0, dst);
RotatedRect rtt;
rtt.center = Point(200, 200);
rtt.size = Size(100, 200);
rtt.angle = 0.0;
line(bg,Point(100,100),Point(350,400), Scalar(0, 0, 255), 8, LINE_AA, 0);//line_AA表示去掉锯齿
ellipse(bg,rtt, Scalar(0, 0, 255), 2, 8);
imshow("矩形的绘制",bg);
}15
随机数与随机颜色
本节主要介绍如何能产生一个随机数字和随机颜色,并且用线条的方式显示出来。
void QuickDemo::random_drawing()
{
Mat canvas = Mat::zeros(Size(512,512), CV_8UC3);
int w = canvas.cols;
int h = canvas.rows;
RNG rng(12345);
while (true)
{
int c = waitKey(10);
if (c == 27)
{
break;
}
int x1 = rng.uniform(0,canvas.cols);
int y1 = rng.uniform(0, h);
int x2 = rng.uniform(0, canvas.cols);
int y2 = rng.uniform(0, h);
int b = rng.uniform(0, 255);
int g = rng.uniform(0, 255);
int r = rng.uniform(0, 255);
canvas = Scalar(0,0,0);
line(canvas, Point(x1, y1), Point(x2, y2), Scalar(b,g,r), 8, LINE_AA,0);//line_AA表示去掉锯齿
imshow("随机绘制演示", canvas);
}
}16
多边形填充与绘制
这节课介绍了2种多边形绘制的实现方式。
void QuickDemo::polyline_drawing_demo(Mat &image)
{
Mat canvas = Mat::zeros(Size(512, 512), CV_8UC3);
Point p1(100, 100);
Point p2(350, 100);
Point p3(450, 280);
Point p4(320, 450);
Point p5(80, 400);
std::vector<Point>pts;//将5个点装入一个容器内。
pts.push_back(p1);//未初始化数组容量,只能用pushback操作
//如果初始化,可以用数组下标操作。
pts.push_back(p2);
pts.push_back(p3);
pts.push_back(p4);
pts.push_back(p5);
//fillPoly(canvas, pts, Scalar(122, 155, 255), 8, 0);//填充多边形
//polylines(canvas, pts, true, Scalar(0, 0, 255), 2, 8, 0);//绘制多边形
/*
参数1表示画布,参数2表示点集,参数3表示true,参数4颜色
参数5表示线宽,参数6表示渲染方式,参数7表示相对左上角(0,0)的位置
*/
//单个API搞定图片的绘制填充
std::vector<std::vector<Point>>contours;
contours.push_back(pts);
drawContours(canvas,contours,-1, Scalar(0, 0, 255),-1);
//参数2表示容器名称,参数3为正表示多边形的绘制,为负表示多边形的填充
imshow("多边形绘制", canvas);
}第一种方式,通过标记各个点,然后存储到容器中,之后对容器中的点进行操作。填充多边形调用fillPoly,绘制多边形调用polylines。第二种方式,使用一个API接口绘制。通过一个容器中的存储的点组成的另一个容器。
17
鼠标操作与响应
鼠标事件响应与绘制!考察基本的图形绘制编程能力。
//参数1表示鼠标事件。
Point sp(-1, -1);//鼠标的开始的位置
Point ep(-1, -1);
Mat temp;
static void on_draw(int event,int x,int y,int flags,void *userdata)
{
Mat image = *((Mat*)userdata);
if(event == EVENT_LBUTTONDOWN)//如果鼠标的左键按下
{
sp.x = x;
sp.y = y;
std::cout << "start point" <<sp<< std::endl;
}
else if (event == EVENT_LBUTTONUP)
{
ep.x = x;
ep.y = y;
int dx = ep.x - sp.x;
int dy = ep.y - sp.y;
if (dx > 0 && dy > 0)
{
Rect box(sp.x, sp.y, dx, dy);
imshow("ROI区域", image(box));
rectangle(image, box, Scalar(0, 0, 255), 2, 8, 0);
imshow("鼠标绘制", image);
sp.x = -1;
sp.y = -1;//复位,为下一次做准备
}
}
else if (event == EVENT_MOUSEMOVE)
{
if (sp.x > 0 && sp.y > 0)
{
ep.x = x;
ep.y = y;
int dx = ep.x - sp.x;
int dy = ep.y - sp.y;
if (dx > 0 && dy > 0)
{
Rect box(sp.x, sp.y, dx, dy);
temp.copyTo(image);
rectangle(image, box, Scalar(0, 0, 255), 2, 8, 0);
imshow("鼠标绘制", image);
}
}
}
}
void QuickDemo::mouse_drawing_demo(Mat &image)
{
namedWindow("鼠标绘制", WINDOW_AUTOSIZE);
setMouseCallback("鼠标绘制", on_draw,(void*)(&image));
//设置窗口的回调函数。参数1表示名称,参数2表示调用on_draw
imshow("鼠标绘制", image);
temp = image.clone();
}18
图像像素类型的转换与归一化
像素值归一化是很常见的预处理方式,OpenCV支持字节与浮点数的图象显示。
void QuickDemo::norm_demo(Mat &image)
{
Mat dst;//定义一个名为dst的二值化类型的数据
std::cout << image.type() << std::endl;//打印出来图片的类型
image.convertTo(image,CV_32F);//将dst数据转换成浮点型float32位数据。
std::cout << image.type() << std::endl;//再次打印转换后的数据类型
normalize(image, dst, 1.0, 0, NORM_MINMAX);//进行归一化操作
std::cout << dst.type() << std::endl;//打印归一化操作之后的数据
imshow("图像的归一化", dst);//显示归一化的图像
//CV_8UC3 ,CV_32FC3 //3通道每个通道8位的UC类型
//转换后 3通道 每个通道32位的浮点数
}19
图像的放缩与插值
介绍基本的图像变换大小的方法。图像的差值处理主要有线性、双线性差值、卢卡斯差值、双立方差值。
void QuickDemo::resize_demo(Mat &image)
{
Mat zoomin, zoomout;
int h = image.rows;
int w = image.cols;
resize(image, zoomin, Size(w/2, h/2),0,0,INTER_LINEAR);
//线性差值操作。
imshow("zoomin", zoomin);;
resize(image, zoomout, Size(w*1.5, h*1.5), 0, 0, INTER_LINEAR);
imshow("zoomin", zoomout);//
}20
图像的翻转
图像的上下、左右、对角线翻转
void QuickDemo::flip_demo(Mat &image)
{
Mat dst;
flip(image, dst, 0);//上下翻转 x对称
flip(image, dst, 1);//左右翻转 y对称
flip(image, dst, -1);//旋转180°
imshow("图像翻转",dst);
}21
图像的旋转
图像旋转的基本原理,变换矩阵M的计算,中心位置偏移计算等。
void QuickDemo::rotate_demo(Mat &image)
{
Mat dst, M;
int h = image.rows;//定义图片的高度
int w = image.cols;//定义图片的宽度
M = getRotationMatrix2D(Point(w / 2, h / 2),45,1.0);
double cos = abs(M.at<double>(0, 0));
double sin = abs(M.at<double>(0, 1));
int nw = cos * w + sin * h;
int nh = sin * w + cos * h;
M.at<double>(0, 2) += (nw / 2 - w / 2);
M.at<double>(1, 2) += (nh / 2 - h / 2);
//参数1原来图像的中心位置。参数2角度是多少。参数3是图像本身大小的放大缩小
warpAffine(image, dst, M,Size(nw,nh),INTER_LINEAR,0, Scalar(0, 0, 255));
imshow("旋转演示", dst);
}22
视频文件摄像头使用
本节介绍了如何读取一个视频,以及调用电脑的摄像头。并且对读取到的视频进行操作。
void QuickDemo::video_demo(Mat &image)
{
VideoCapture capture("D:/images/123.mp4"); //读取视频的地址
Mat frame;//定义一个二值化的 frame
while (true)
{
capture.read(frame); //读取视频
//flip(frame, frame, 1);//图像镜像操作
if(frame.empty())//如果视频为空的话 跳出操作
{
break;
}
imshow("frame", frame);//显示视频
colorSpace_Demo(frame);//对视频调用之前的demo
int c = waitKey(100);//停顿100ms 做视频处理都是1
if (c == 27) { //esc 退出应用程序
break;
}
}
capture.release();//释放相机的资源
}对读取到的视频 操作方式有镜像对称。加各种滤镜等等。
24
视频处理与保存
视频的属性,SD(标清),HD(高清),UHD(超清),蓝光。如何读取视频文件,以及读取视频文件的属性,衡量视频处理指标:FPS。保存视频时的编码格式。保存视频的实际size和create的size大小保持一致。
void QuickDemo::video_demo(Mat &image)
{
VideoCapture capture("D:/images/123.mp4");
int frame_width = capture.get(CAP_PROP_FRAME_WIDTH);//获取视频的宽度
int frame_height = capture.get(CAP_PROP_FRAME_HEIGHT);//获取视频的高度
int count = capture.get(CAP_PROP_FRAME_COUNT);//视频总的帧数
//fps是衡量处理视频的能力
double fps = capture.get(CAP_PROP_FPS);
std::cout << "frame width" << frame_width << std::endl;
std::cout << "frame height" << frame_height << std::endl;
std::cout << "frame FPS" << fps << std::endl;
std::cout << "frame count" << count << std::endl;
VideoWriter writer("D:/test.mp4",capture.get(CAP_PROP_FOURCC),fps,Size(frame_width, frame_height),true);
//参数1 保存地址。参数2 获取图片的格式 参数3 图片的帧数 参数4 视频宽高 参数5 真
Mat frame;
while (true)
{
capture.read(frame);
//flip(frame, frame, 1);//图像镜像操作
if(frame.empty())
{
break;
}
imshow("frame", frame);
colorSpace_Demo(frame);
writer.write(frame);
int c = waitKey(100);//停顿100ms 做视频处理都是1
if (c == 27) { //esc 退出应用程序
break;
}
}
capture.release();//释放相机的资源
writer.release();//释放存放的资源
}本节课,介绍了视频的一些基本熟悉,紧接介绍如何获取视频的属性,并且通过特定的格式保存到相应的存储位置上。
25
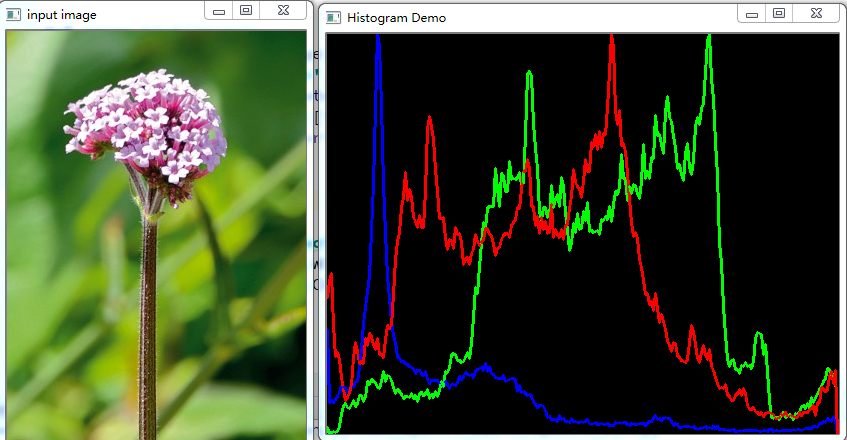
图像的直方图
直方图是图像的统计学特征。表示了图像的各个像素在0-255出现的频率。图像的平移旋转都不会对性质进行改变。缺点:不能表征一张图像。
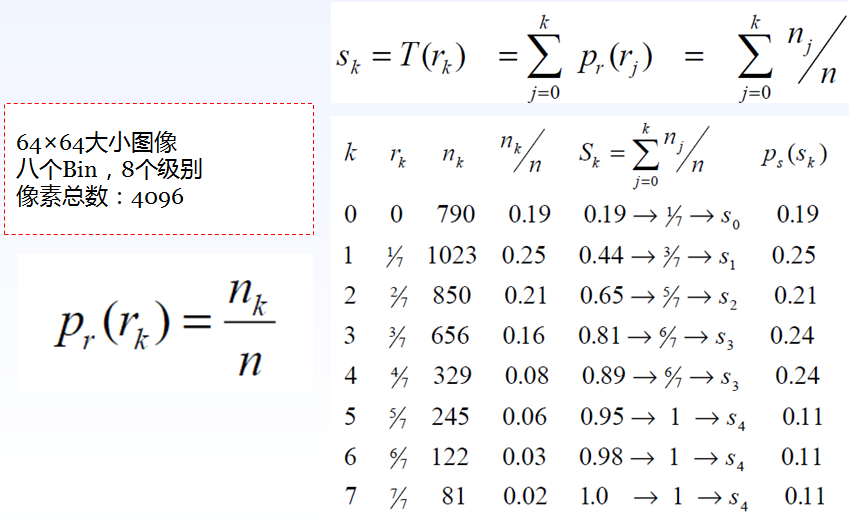
26
直方图的均衡化
用途:用于图像增强,人脸检测,卫星遥感。均衡化的图像只支持单通道。
void QuickDemo::histogram_eq_demo(Mat &image)
{
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY);
//直方图均衡化只支持灰度图像,不支持彩色图像。
imshow("灰度图像", gray);
Mat dst;
equalizeHist(gray, dst);
imshow("直方图均衡化", dst);
}27
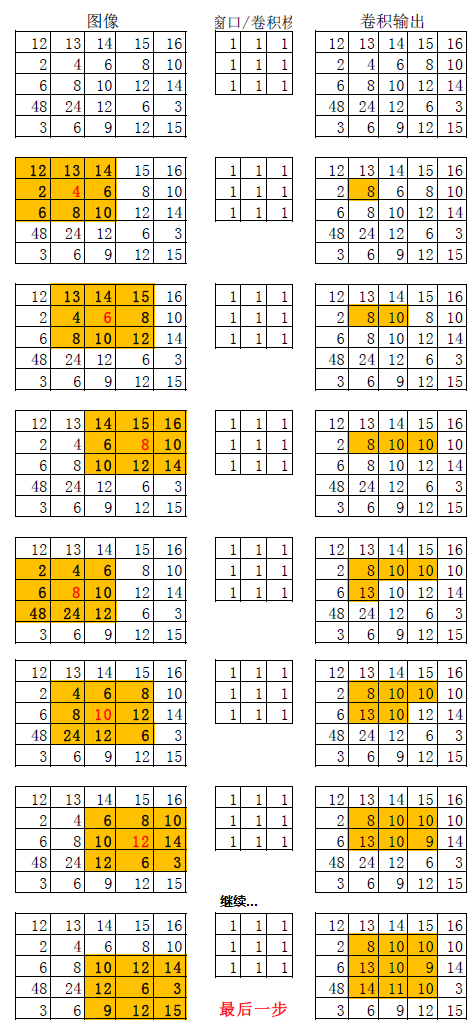
图像的卷积操作
卷积的作用,高的往下降,低的往上升。但是会造成信息丢失。产生模糊效果。是一种线性操作,点乘,之后相加。
void QuickDemo::blur_demo(Mat &image)
{
Mat dst;
blur(image, dst, Size(15, 15), Point(-1, -1));
//参数1原始图像,参数2卷积之后的图像,参数3卷积的矩阵大小,支持单行或者单列的卷积操作,参数4卷积的起始点。
imshow("图像卷积操作", dst);
}28
高斯模糊
中心的数值最大,离中心距离越远,数值越小。高斯卷积数学表达式说明:
void QuickDemo::gaussian_blur_demo(Mat &image)
{
Mat dst;
GaussianBlur(image, dst, Size(5, 5), 15);
imshow("高斯模糊", dst);
//参数1表示初始图像,参数2表示处理后的图像,参数3表示高斯矩阵大小 正数而且是奇数,
//参数4表示西格玛x为15 西格玛y为15
}29
高斯双边模糊
边缘保留的滤波算法!去噪!

void QuickDemo::bifilter_demo(Mat &image)
{
Mat dst;
bilateralFilter(image,dst,0,100,0);
//参数1代表原图,参数2代表处理之后的图像,参数3色彩空间。参数4表示坐标空间,双边是指 色彩空间和坐标空间。
namedWindow("双边模糊", WINDOW_FREERATIO);//创建了一个新窗口,参数1表示名称,第二个参数代表一个自由的比例
imshow("双边模糊", dst);//表示显示在新创建的
}30
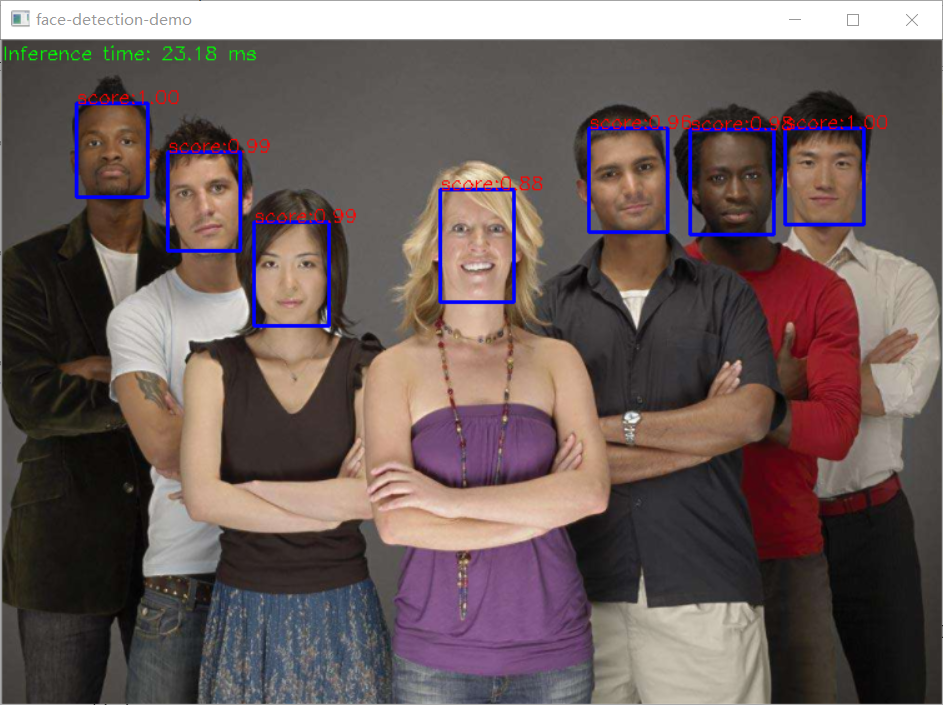
实时视频人脸检测
OpenCV4.x中基于深度神经网络模型的高实时,稳定的人脸检测演示。
dnn::Net net = dnn::readNetFromTensorflow(root_dir+ "opencv_face_detector_uint8.pb", root_dir+"opencv_face_detector.pbtxt");
VideoCapture capture("D:/images/video/example_dsh.mp4");
Mat frame;
while (true) {
capture.read(frame);
if (frame.empty()) {
break;
}
Mat blob = dnn::blobFromImage(frame, 1.0, Size(300, 300), Scalar(104, 177, 123), false, false);
net.setInput(blob);// NCHW
Mat probs = net.forward(); //
Mat detectionMat(probs.size[2], probs.size[3], CV_32F, probs.ptr<float>());
// 解析结果
for (int i = 0; i < detectionMat.rows; i++) {
float confidence = detectionMat.at<float>(i, 2);
if (confidence > 0.5) {
int x1 = static_cast<int>(detectionMat.at<float>(i, 3)*frame.cols);
int y1 = static_cast<int>(detectionMat.at<float>(i, 4)*frame.rows);
int x2 = static_cast<int>(detectionMat.at<float>(i, 5)*frame.cols);
int y2 = static_cast<int>(detectionMat.at<float>(i, 6)*frame.rows);
Rect box(x1, y1, x2 - x1, y2 - y1);
rectangle(frame, box, Scalar(0, 0, 255), 2, 8, 0);
}
}
imshow("人脸检测演示", frame);
int c = waitKey(1);
if (c == 27) { // 退出
break;
}
}OpenCV-C++/Python视频教程30课时,请看B站:
https://www.bilibili.com/video/BV1hM4y1M7vQ (python版本)https://www.bilibili.com/video/BV1i54y1m7tw (C++版本)
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~