
基础必读 | 什么是结构光?
本文来源于公众号:光行天下
仅用于学术分享,如有侵权,请联系 后 台作删文处理
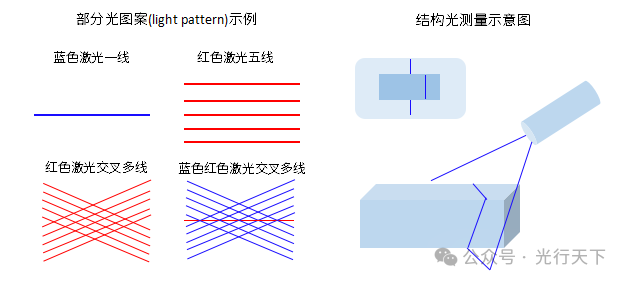
结构光是从已知角度将某种特定光图案(如平面、网格或更复杂的形状)投射到物体上形成的投影,多用于视觉测量。最常使用的光图案(light pattern)是由某一光束沿扇面展开后形成的一面光(a sheet-of-light),当这面光与物体相交时就会在物体表面形成一条可见的亮线。从某已知角度来观测这条亮线的图像,根据看到的该线的扭曲变形情况就能计算出物体表面的高度变化。
 结构光的作用 投射特定的光信息到物体,根据物体造成的光信号的变化来计算物体的位置和深度等信息,获取物体的三维信息。 结构光的测量原理
结构光的作用 投射特定的光信息到物体,根据物体造成的光信号的变化来计算物体的位置和深度等信息,获取物体的三维信息。 结构光的测量原理
结构光测量属于主动光学测量,通常以某种形状的结构光投射到物体表面,通过检测结构光偏移距离得到物体的三维信息。通常的结构光光源有激光和投影仪投射光,激光光源具有高亮度和良好的方向性,是一种理想的投射光源。
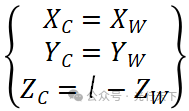
在结构光激光测量中,为了获取物体的三维信息,一般都会使用三角定位原理,其基本思想是利用结构光照明中的几何信息帮助提供景物中的几何信息。 根据相机、结构光和物体之间的几何关系,来确定物体的三维信息,下图为三角测量的原理图。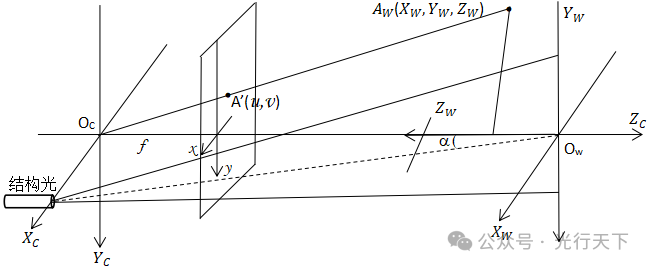 结构光三角测量原理图 如上图所示,图中显示了3个坐标系,分别为相机坐标系O C X C Y C 、图像坐标系oxy和世界坐标系OwXwYw。图像坐标系与相机坐标系原点之间的距离为焦距f,图像坐标系与世界坐标系原点之间的距离为l。结构光平面与相机光轴夹角为a,取世界坐标系的原点位于相机光轴与结构光平面的交点,Xw轴和Yw轴分别与相机坐标系X C 和Y C 轴平行,Z W 与Z C 轴重合,但方向相反,则世界坐标系与相机坐标系有如下关系:
结构光三角测量原理图 如上图所示,图中显示了3个坐标系,分别为相机坐标系O C X C Y C 、图像坐标系oxy和世界坐标系OwXwYw。图像坐标系与相机坐标系原点之间的距离为焦距f,图像坐标系与世界坐标系原点之间的距离为l。结构光平面与相机光轴夹角为a,取世界坐标系的原点位于相机光轴与结构光平面的交点,Xw轴和Yw轴分别与相机坐标系X C 和Y C 轴平行,Z W 与Z C 轴重合,但方向相反,则世界坐标系与相机坐标系有如下关系:
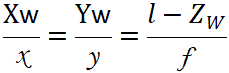
 设世界坐标系中的一点A的像为A’,则根据相似三角形原理,有:
设世界坐标系中的一点A的像为A’,则根据相似三角形原理,有:
在世界坐标系中,结构光平面的方程为:Xw = Z W tga
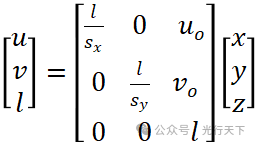
联立以上两式,可得到: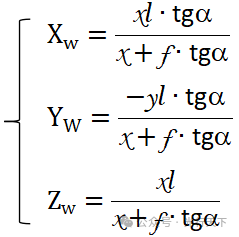 又由于在像素坐标系ouv中,每一像素的坐标(u,v)分别是该像素在图像矩阵中的行数与列数,(u,v)是像点在像素坐标系中以像素为单位的坐标。根据像点在像平面上的物理位置,建立以物理单位表示的图像平面二维坐标系oxy,该坐标系x轴和y轴分别与u轴和v轴平行,原点为相机光轴与像平面的交点,一般位于图像中心,但在实际情况下会有小的偏移,在ouv中的坐标记为(u 0 ,v 0 ),也称为主点坐标。图像中任意一个像素在两个坐标系下的坐标采用齐次坐标和矩阵式表示,有如下关系:
又由于在像素坐标系ouv中,每一像素的坐标(u,v)分别是该像素在图像矩阵中的行数与列数,(u,v)是像点在像素坐标系中以像素为单位的坐标。根据像点在像平面上的物理位置,建立以物理单位表示的图像平面二维坐标系oxy,该坐标系x轴和y轴分别与u轴和v轴平行,原点为相机光轴与像平面的交点,一般位于图像中心,但在实际情况下会有小的偏移,在ouv中的坐标记为(u 0 ,v 0 ),也称为主点坐标。图像中任意一个像素在两个坐标系下的坐标采用齐次坐标和矩阵式表示,有如下关系:
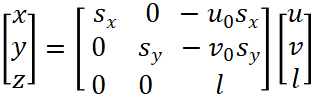
 上式的逆关系为:
上式的逆关系为:
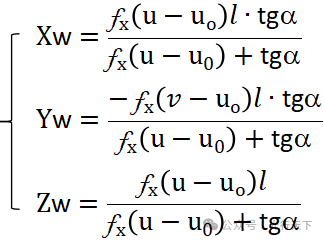
 可以得到像素点-世界坐标点之间的对应关系为:
可以得到像素点-世界坐标点之间的对应关系为:
 参考文献:孙玉娟,基于光学图像的三维重建理论与技术,清华大学出版社。
参考文献:孙玉娟,基于光学图像的三维重建理论与技术,清华大学出版社。 推荐阅读
(点击标题可跳转阅读)
评论