
阿里-测试开发面经(六)
点击蓝字关注我们,获取更多面经



HashMap是基于哈希表的Map接口的非同步实现
HashMap实际上是一个“链表散列”的数据结构,即数组和链表的结合体。
首先来了解一下数据结构中数组和链表来实现对数据的存储,但这两者基本上是两个极端。
数组
数组存储区间是连续的,占用内存严重,故空间复杂的很大。但数组的二分查找时间复杂度小,为O(1);数组的特点是:寻址容易,插入和删除困难。
链表
链表存储区间离散,占用内存比较宽松,故空间复杂度很小,但时间复杂度很大,达O(N)。链表的特点是:寻址困难,插入和删除容易。
哈希表
那么我们能不能综合两者的特性,做出一种寻址容易,插入删除也容易的数据结构?答案是肯定的,这就是我们要提起的哈希表。哈希表((Hash table)既满足了数据的查找方便,同时不占用太多的内容空间,使用也十分方便。
哈希表有多种不同的实现方法,我接下来解释的是最常用的一种方法—— 拉链法,我们可以理解为“链表的数组” ,如图:
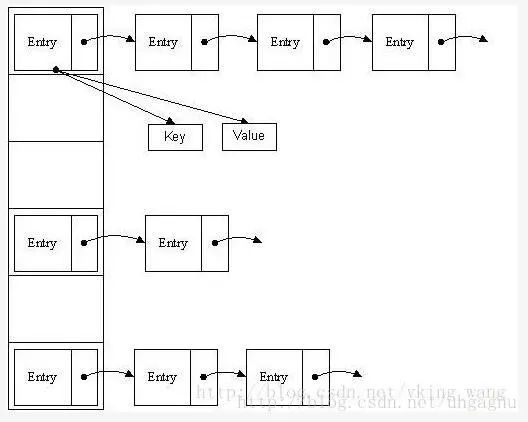

从上图我们可以发现哈希表是由数组+链表组成的,一个长度为16的数组中,每个元素存储的是一个链表的头结点。那么这些元素是按照什么样的规则存储到数组中呢。一般情况是通过hash(key)%len获得,也就是元素的key的哈希值对数组长度取模得到。比如上述哈希表中,12%16=12,28%16=12,108%16=12,140%16=12。所以12、28、108以及140都存储在数组下标为12的位置。
首先HashMap里面实现一个静态内部类Entry,其重要的属性有 key , value, next,从属性key,value我们就能很明显的看出来Entry就是HashMap键值对实现的一个基础bean,我们上面说到HashMap的基础就是一个线性数组,这个数组就是Entry[],Map里面的内容都保存在Entry[]里面。
/*** The table, resized as necessary. Length MUST Always be a power of two.*/transient Entry[] table;
1. HashMap的存取实现
既然是线性数组,为什么能随机存取?这里HashMap用了一个小算法,大致是这样实现:
// 存储时:int hash = key.hashCode(); // 这个hashCode方法这里不详述,只要理解每个key的hash是一个固定的int值int index = hash % Entry[].length;Entry[index] = value;// 取值时:int hash = key.hashCode();int index = hash % Entry[].length;return Entry[index];
put()
疑问:如果两个key通过hash%Entry[].length得到的index相同,会不会有覆盖的危险?
这里HashMap里面用到链式数据结构的一个概念。上面我们提到过Entry类里面有一个next属性,作用是指向下一个Entry。打个比方, 第一个键值对A进来,通过计算其key的hash得到的index=0,记作:Entry[0] = A。一会后又进来一个键值对B,通过计算其index也等于0,现在怎么办?HashMap会这样做:B.next = A,Entry[0] = B,如果又进来C,index也等于0,那么C.next = B,Entry[0] = C;这样我们发现index=0的地方其实存取了A,B,C三个键值对,他们通过next这个属性链接在一起。所以疑问不用担心。也就是说数组中存储的是最后插入的元素。到这里为止,HashMap的大致实现,我们应该已经清楚了。
public V put(K key, V value) {if (key == null)return putForNullKey(value); //null总是放在数组的第一个链表中int hash = hash(key.hashCode());int i = indexFor(hash, table.length);//遍历链表for (Entry<K,V> e = table[i]; e != null; e = e.next) {Object k;//如果key在链表中已存在,则替换为新valueif (e.hash == hash && ((k = e.key) == key || key.equals(k))) {V oldValue = e.value;e.value = value;e.recordAccess(this);return oldValue;}}modCount++;addEntry(hash, key, value, i);return null;}void addEntry(int hash, K key, V value, int bucketIndex) {Entry<K,V> e = table[bucketIndex];table[bucketIndex] = new Entry<K,V>(hash, key, value, e); //参数e, 是Entry.next//如果size超过threshold,则扩充table大小。再散列if (size++ >= threshold)resize(2 * table.length);}
当然HashMap里面也包含一些优化方面的实现,这里也说一下。比如:Entry[]的长度一定后,随着map里面数据的越来越长,这样同一个index的链就会很长,会不会影响性能?HashMap里面设置一个因子,随着map的size越来越大,Entry[]会以一定的规则加长长度。
get()
public V get(Object key) {if (key == null)return getForNullKey();int hash = hash(key.hashCode());//先定位到数组元素,再遍历该元素处的链表for (Entry<K,V> e = table[indexFor(hash, table.length)];e != null;e = e.next) {Object k;if (e.hash == hash && ((k = e.key) == key || key.equals(k)))return e.value;}return null;}
null key的存取
null key总是存放在Entry[]数组的第一个元素。
private V putForNullKey(V value) {for (Entry<K,V> e = table[0]; e != null; e = e.next) {if (e.key == null) {V oldValue = e.value;e.value = value;e.recordAccess(this);return oldValue;}}modCount++;addEntry(0, null, value, 0);return null;}private V getForNullKey() {for (Entry<K,V> e = table[0]; e != null; e = e.next) {if (e.key == null)return e.value;}return null;}
确定数组index:hashcode % table.length取模
HashMap存取时,都需要计算当前key应该对应Entry[]数组哪个元素,即计算数组下标;算法如下:
/*** Returns index for hash code h.*/static int indexFor(int h, int length) {return h & (length-1);}
按位取并,作用上相当于取模mod或者取余%。
这意味着数组下标相同,并不表示hashCode相同。
table初始大小
public HashMap(int initialCapacity, float loadFactor) {.....// Find a power of 2 >= initialCapacityint capacity = 1;while (capacity < initialCapacity)capacity <<= 1;this.loadFactor = loadFactor;threshold = (int)(capacity * loadFactor);table = new Entry[capacity];init();}
注意table初始大小并不是构造函数中的initialCapacity!!
而是 >= initialCapacity的2的n次幂!!!!
再散列rehash过程
当哈希表的容量超过默认容量时,必须调整table的大小。当容量已经达到最大可能值时,那么该方法就将容量调整到Integer.MAX_VALUE返回,这时,需要创建一张新表,将原表的映射到新表中。
/*** Rehashes the contents of this map into a new array with a* larger capacity. This method is called automatically when the* number of keys in this map reaches its threshold.** If current capacity is MAXIMUM_CAPACITY, this method does not* resize the map, but sets threshold to Integer.MAX_VALUE.* This has the effect of preventing future calls.** @param newCapacity the new capacity, MUST be a power of two;* must be greater than current capacity unless current* capacity is MAXIMUM_CAPACITY (in which case value* is irrelevant).*/void resize(int newCapacity) {Entry[] oldTable = table;int oldCapacity = oldTable.length;if (oldCapacity == MAXIMUM_CAPACITY) {threshold = Integer.MAX_VALUE;return;}Entry[] newTable = new Entry[newCapacity];transfer(newTable);table = newTable;threshold = (int)(newCapacity * loadFactor);}/*** Transfers all entries from current table to newTable.*/void transfer(Entry[] newTable) {Entry[] src = table;int newCapacity = newTable.length;for (int j = 0; j < src.length; j++) {Entry<K,V> e = src[j];if (e != null) {src[j] = null;do {Entry<K,V> next = e.next;//重新计算indexint i = indexFor(e.hash, newCapacity);e.next = newTable[i];newTable[i] = e;e = next;} while (e != null);}}}
hashmap的扩容机制
1、当我们往hashmap中put元素的时候,先根据key的hash值得到这个元素在 数组中的位置(即下标),然后就可以把这个元素放到对应的位置中了。如果这个元素所在的位子上已经存放有其他元素了,那么在同一个位子上的元素将以链表的 形式存放,新加入的放在链头,比如a->b->c,新加入的d放到a的位置前面,最先加入的放在链尾,也就是c。最后变成d->a->b->c,从hashmap中get元素时,首先计算key的hashcode,找到数组中对应位置的某一元素, 然后通过key的equals方法在对应位置的链表中找到需要的元素。
2、在hashmap中要找到某个元素,需要根据key的hash值来求得对应数组中的位置。如何计算这个位置就是hash算法。前面说过hashmap的数据结构是数组和链表的结合,所以我们当然希望这个hashmap里面的元素位置尽量的分布均匀些,尽量使得每个位置上的元素数量只有一个,那么当我们用hash算法求得这个位置 的时候,马上就可以知道对应位置的元素就是我们要的,而不用再去遍历链表。所以我们首先想到的就是把hashcode对数组长度取模运算,这样一来,元素的分布相对来说是比较均匀的。但是,“模”运算的消耗还是比较大的,能不能找一种更快速,消耗更小的方式那?java中是这样做的
staticintindexFor(inth,intlength){returnh&(length-1);}
首先算得key的hashcode值,然后跟数组的长度-1做一次“与”运算(&)。看上去很简单,其实比较有玄机。比如数组的长度是2的4次方, 那么hashcode就会和2的4次方-1做“与”运算。很多人都有这个疑问,为什么hashmap的数组初始化大小都是2的次方大小时,hashmap 的效率最高,我以2的4次方举例,来解释一下为什么数组大小为2的幂时hashmap访问的性能最高。看下图,左边两组是数组长度为16(2的4次方),右边两组是数组长度为15。两组的hashcode均为8和9,但是很明显,当它们和1110“与”的 时候,产生了相同的结果,也就是说它们会定位到数组中的同一个位置上去,这就产生了碰撞,8和9会被放到同一个链表上,那么查询的时候就需要遍历这个链 表,得到8或者9,这样就降低了查询的效率。同时,我们也可以发现,当数组长度为15的时候,hashcode的值会与14(1110)进行“与”,那么 最后一位永远是0,而0001,0011,0101,1001,1011,0111,1101这几个位置永远都不能存放元素了,空间浪费相当大,更糟的是 这种情况中,数组可以使用的位置比数组长度小了很多,这意味着进一步增加了碰撞的几率,减慢了查询的效率!所以说,当数组长度为2的n次幂的时候,不同的key算得得index相同的几率较小,那么数据在数组上分布就比较均匀,也就是说碰撞的几率小,相对的,查询的时候就不用遍历某个位置上的链表,这样查询效率也就较高了。说到这里,我们再回头看一下hashmap中默认的数组大小是多少,查看源代码可以得知是16,为什么是16,而不是15,也不是20呢,看到上面 annegu的解释之后我们就清楚了吧,显然是因为16是2的整数次幂的原因,在小数据量的情况下16比15和20更能减少key之间的碰撞,而加快查询 的效率。
3、当hashmap中的元素越来越多的时候,碰撞的几率也就越来越高(因为数组的长度是固定的),所以为了提高查询的效率,就要对hashmap的数组进行 扩容,数组扩容这个操作也会出现在ArrayList中,所以这是一个通用的操作,很多人对它的性能表示过怀疑,不过想想我们的“均摊”原理,就释然了, 而在hashmap数组扩容之后,最消耗性能的点就出现了:原数组中的数据必须重新计算其在新数组中的位置,并放进去,这就是resize。
那么hashmap什么时候进行扩容呢?当hashmap中的元素个数超过数组大小*loadFactor时,就会进行数组扩容,loadFactor的 默认值为0.75,也就是说,默认情况下,数组大小为16,那么当hashmap中元素个数超过16*0.75=12的时候,就把数组的大小扩展为 2*16=32,即扩大一倍,然后重新计算每个元素在数组中的位置,而这是一个非常消耗性能的操作,所以如果我们已经预知hashmap中元素的个数,那 么预设元素的个数能够有效的提高hashmap的性能。
比如说,我们有1000个元素new HashMap(1000), 但是理论上来讲new HashMap(1024)更合适,不过上面annegu已经说过,即使是1000,hashmap也自动会将其设置为1024。但是new HashMap(1024)还不是更合适的,因为0.75*1000 < 1000, 也就是说为了让0.75 * size > 1000, 我们必须这样new HashMap(2048)才最合适,既考虑了&的问题,也避免了resize的问题。
哈希表及处理hash冲突的方法
看了ConcurrentHashMap的实现, 使用的是拉链法.
虽然我们不希望发生冲突,但实际上发生冲突的可能性仍是存在的。当关键字值域远大于哈希表的长度,而且事先并不知道关键字的具体取值时。冲突就难免会发生。
另外,当关键字的实际取值大于哈希表的长度时,而且表中已装满了记录,如果插入一个新记录,不仅发生冲突,而且还会发生溢出。
因此,处理冲突和溢出是哈希技术中的两个重要问题。
哈希法又称散列法、杂凑法以及关键字地址计算法等,相应的表称为哈希表。这种方法的基本思想是:首先在元素的关键字k和元素的存储位置p之间建立一个对应关系f,使得p=f(k),f称为哈希函数。创建哈希表时,把关键字为k的元素直接存入地址为f(k)的单元;以后当查找关键字为k的元素时,再利用哈希函数计算出该元素的存储位置p=f(k),从而达到按关键字直接存取元素的目的。
当关键字集合很大时,关键字值不同的元素可能会映象到哈希表的同一地址上,即 k1≠k2 ,但 H(k1)=H(k2),这种现象称为冲突,此时称k1和k2为同义词。实际中,冲突是不可避免的,只能通过改进哈希函数的性能来减少冲突。
综上所述,哈希法主要包括以下两方面的内容:
1)如何构造哈希函数
2)如何处理冲突。
更多面经
扫描二维码
获取更多面经
扶摇就业