
详解 | SLAM回环检测问题
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
本文经知乎作者fishmarch授权转载,二次转载请联系作者
原文:https://zhuanlan.zhihu.com/p/45573552
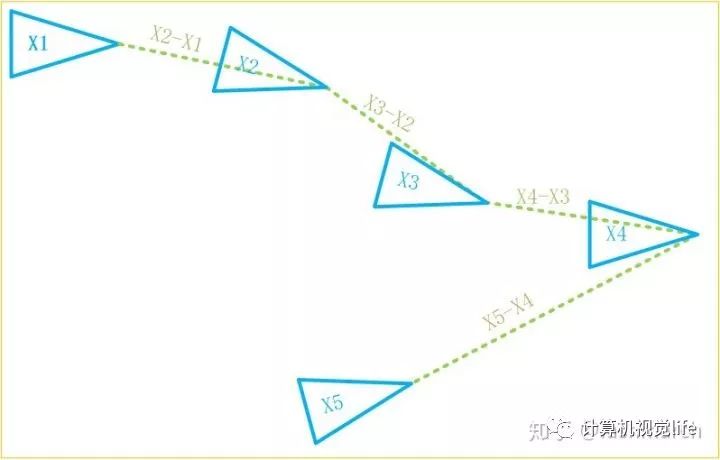
在视觉SLAM问题中,位姿的估计往往是一个递推的过程,即由上一帧位姿解算当前帧位姿,因此其中的误差便这样一帧一帧的传递下去,也就是我们所说的累积误差。
如下图所示,我们的位姿约束都是与上一帧建立的,第五帧的位姿误差中便已经积累了前面四个约束中的误差。
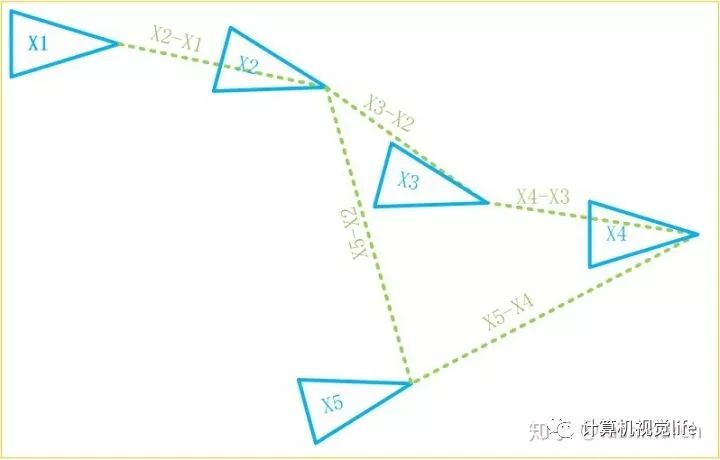
但此时,如果我们发现第五帧位姿不一定要由第四帧推出来,还可以由第二帧推算出来,那显然这样计算误差更小呀,因为只有两个约束的误差了嘛。像这样与之前的某一帧建立位姿约束关系就叫做回环。回环通过减少了约束数,起到了减小累积误差的作用。
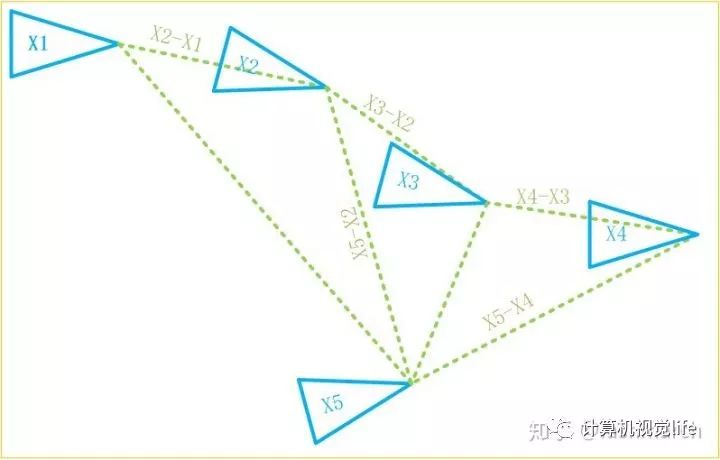
那现在又有新的问题了,我们怎么知道可以由第二帧推算第五帧位姿呢?就像下图,可能第一帧、第三帧也可以呀。确实,我们之所以用前一帧递推下一帧位姿,因为这两帧足够近,肯定可以建立两帧的约束,但是距离较远的两帧就不一定可以建立这样的约束关系了。找出可以建立这种位姿约束的历史帧,就是回环检测。
那我们现在的重点就是回环检测了。其实我们完全可以把以前的所有帧都拿过来和当前帧做匹配,匹配足够好的就是回环嘛,但问题是计算量太大了,两帧匹配本来就慢,这样做的话还没有比较好的初值,需要匹配的数目又如此巨大,CPU和我们都会疯的。
但其实,任意两帧是否构成回环可以由更简单的方法做一个初步的筛选,就像一帧中有一个房子,另一帧中是一棵树,那这两帧明显关系不大嘛。通过这种方式,我们便可以对回环做出初步筛选。而这里说的房子、树就是词袋模型中的单词。也就是描述子的进一步抽象集合。
单词:差距较小的描述子的集合
字典:所有的单词
因此每一帧都可以用单词来描述,也就是这一帧中有哪些单词,这里只关心了有没有,而不必关心具体在哪里。只有两帧中单词种类相近才可能构成回环。
因此,现在利用词袋模型我们将回环检测大致分为了以下三个步骤:
构建字典(所有单词的集合)

确定一帧中具有哪些单词,用向量表示 (1表示具有该单词,0表示没有)

比较两帧描述向量的差异
字典结构
字典由单词组成,而单词来自于描述子。并不是说一个描述子就是一个单词,而是一个单词表示了一组多个描述子,同组内的描述子差异较小。例如,描述子由256位组成,则描述子的种类便有  种,这个数相当大了,我们确定单词,构建字典的过程就类似于将这 种描述子进行分类(聚类)的过程,我们可以指定具体分成多少类。那就很像我们现实中的字典了,有厚有薄,也就是看我们分类的多少了。
种,这个数相当大了,我们确定单词,构建字典的过程就类似于将这 种描述子进行分类(聚类)的过程,我们可以指定具体分成多少类。那就很像我们现实中的字典了,有厚有薄,也就是看我们分类的多少了。
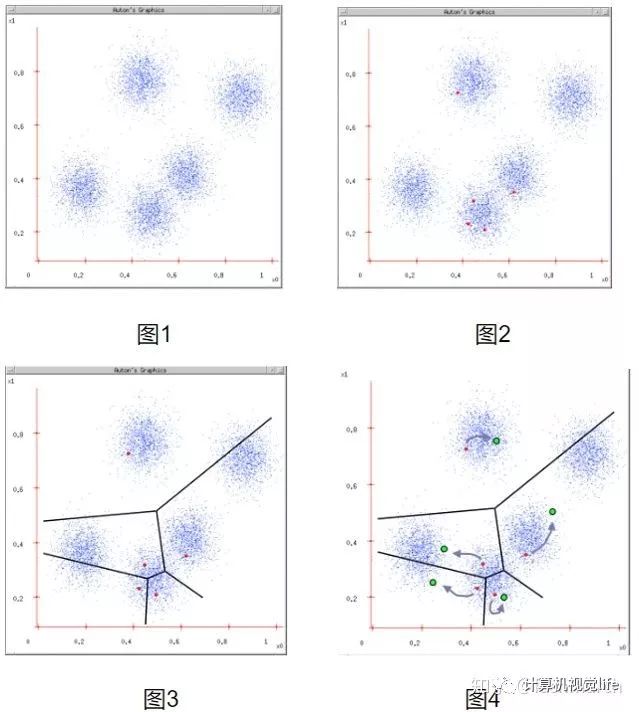
那现在字典的构建也就是一个描述子聚类的过程。聚类算法也有很多了,这里采用了K-means算法,其过程也很简单:
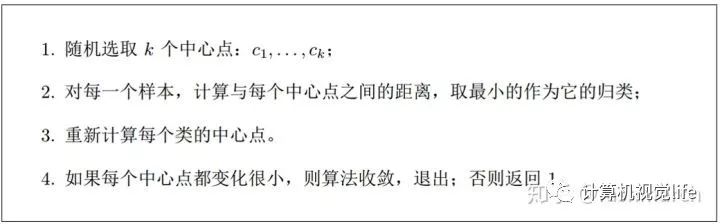 摘自《视觉SLAM14讲》
摘自《视觉SLAM14讲》
也可以用下图表示:
 摘自https://www.cnblogs.com/ybjourney/p/4714870.html
摘自https://www.cnblogs.com/ybjourney/p/4714870.html
现在通过聚类我们获得了字典,但这里又有一个问题。回想我们平时查字典的过程,不可能直接打开一个一个去找吧,我们会利用目录,首字母等方法方便我们查找。这里也一样,一个个去查找速度太慢了,因此我们将字典构建成一个K叉树的结构来加速查找。如下图所示:
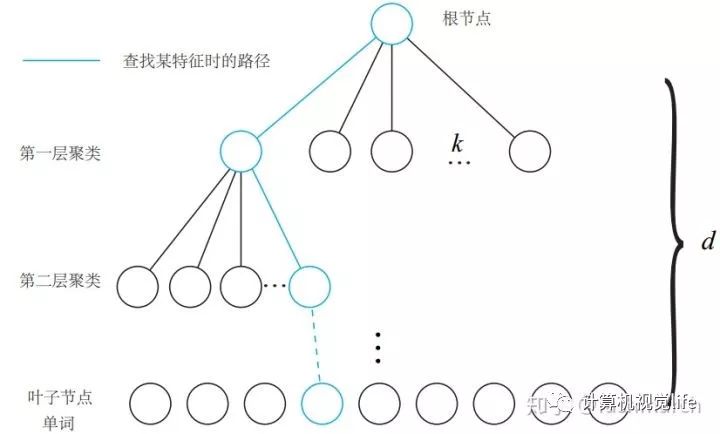 摘自《视觉SLAM14讲》
摘自《视觉SLAM14讲》
我们在每一层中都用K-means算法进行了聚类,分成了k个类,共有这样的d层(不包括根节点)因此在查找过程中,我们逐层向下,最终找到的叶节点也就是最终的单词。
还可以用下图理解:
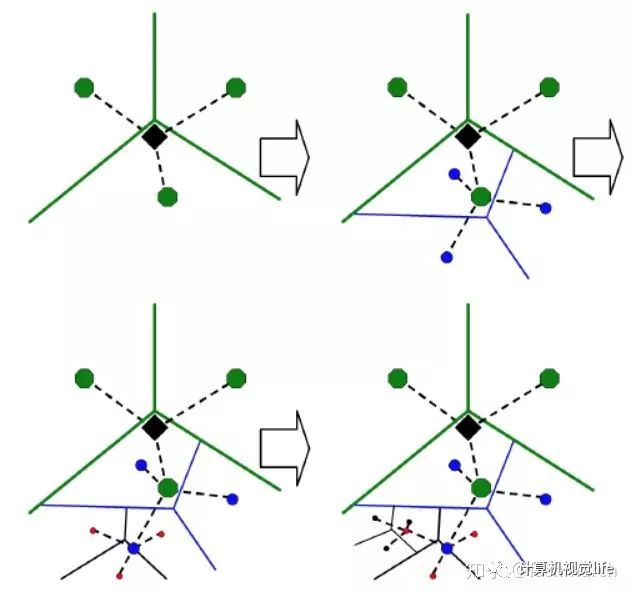 摘自[2]
摘自[2]
现在我们有了字典,但还有一点需要注意。我们利用单词表示图像,目的是发现回环,也就是两帧图像具有较高的相似性。那其实不同的单词对这一目的的贡献性是不同的。例如,我这篇文章中有很多“我们”这个词,但这个词并不能告诉我们太多信息。而有些单词例如“回环”、“K-means”就比较具有代表性,能大概告诉我们这句话讲了什么。因此不同的单词应该具有不同的权重。
我们用两个量来描述这种权重:
IDF(Inverse Document Frequency):描述单词在字典中出现的频率(构建字典时),越低越具有代表性

 为所有描述子数,
为所有描述子数,  为该单词出现次数。
为该单词出现次数。 的作用大概是降低量级,毕竟 很大。
的作用大概是降低量级,毕竟 很大。
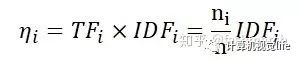
TF(Term Frequency):单词在单帧图像中出现的频率,越高越具有代表性

为一帧图像中所有单词数, 为一帧图像中该单词出现次数。
因此将一帧图像转化为单词表示时,我们要计算其单词的权重:

因此一帧图像  由单词
由单词  、及对应的权重
、及对应的权重  表示:
表示:

同时,这里我们要将一帧图像中的所有的权重归一化:

我们在计算两帧图像的差异时,就比较对应的权重即可。
计算q和d两帧的差异(p表示范数,常取L1范数)
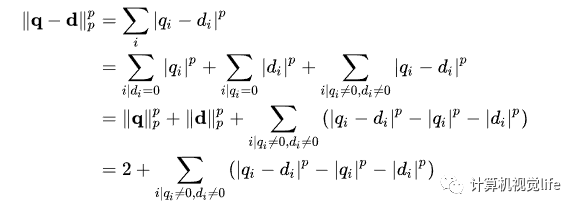
第二个等号进行了一个分类:只在q中有的单词、只在d中有的单词、在q、d中都有的单词。
第四个等号:因为进行了归一化,前两项都等于1
而两帧相似度的评分定义如下(越大表示越相似):
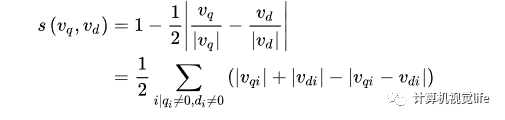
当评分s足够大时即可判断两帧可能为回环。
在这里简单说一下,回环出现后的处理,看得不多,如有错误还请指正。
当然回环的判断也并没有这么简单,含有很多的筛选环节,毕竟错误的回环将带来巨大灾难,宁可不要。例如某一位姿附近连续多次(ORB-SLAM中为3次)与历史中某一位姿附近出现回环才判断为回环;回环候选帧仍然要匹配,匹配点足够才为回环。
在判断出现回环后,两帧计算Sim3变换(因为有尺度漂移),也就是从历史帧直接推算当前位姿。
当我们用第m帧推算了回环帧n的位姿时,使得n的位姿漂移误差较小,但其实同时可以用第n帧来计算n-1帧的位姿,使n-1帧的位姿漂移误差也减小。因此,这里还要有一个位姿传播。
另外我们可以优化所有的位姿,也就是进行一个位姿图优化(由位姿变换构建位姿约束)。
最后,我们还可以进行一起全局所有变量的BA优化。
总结
总结来说,词袋模型通过描述一帧图像中有哪些单词,来加速寻找可能闭环帧的过程。
另外我们也可以利用单词加速特征点的匹配,例如帧A中的特征点a属于单词  ,那在帧B中寻找匹配时,也要去找属于单词 的特征点。
,那在帧B中寻找匹配时,也要去找属于单词 的特征点。
其实感觉词袋模型更近一步就是语义了,也就是将单词赋予真实的语义信息,同样可以起到闭环帧筛选,两帧特征点辅助匹配的作用。
最后简单看一下DBoW3中的代码
其中比较重要的大概就是以下几个函数:
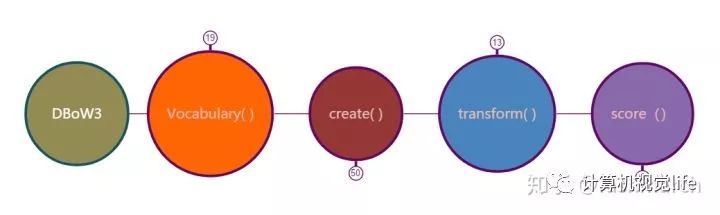
构造函数,可以从文件中读取字典,由图像序列生成字典、复制字典等
其默认的树状结构为分支数k=10,深度L=5(不包括根节点);
权重为TF_IDF;
评分类型为L1范数
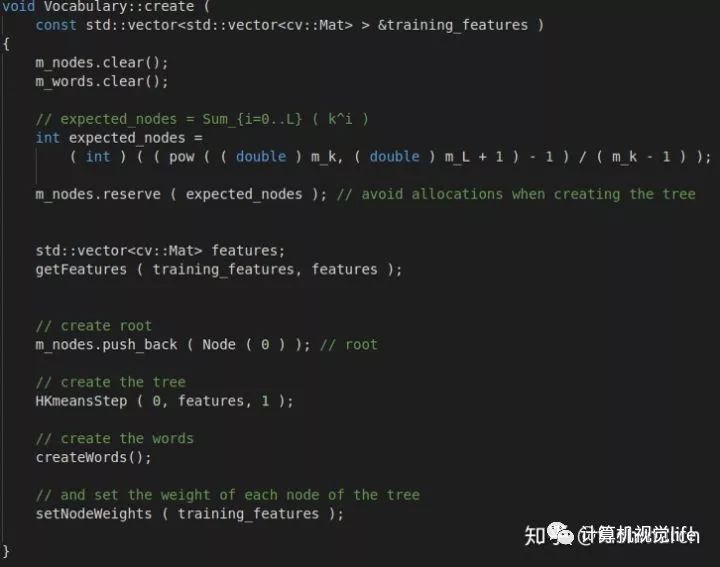
其主要步骤为:构建树、构建单词、计算权重(IDF)
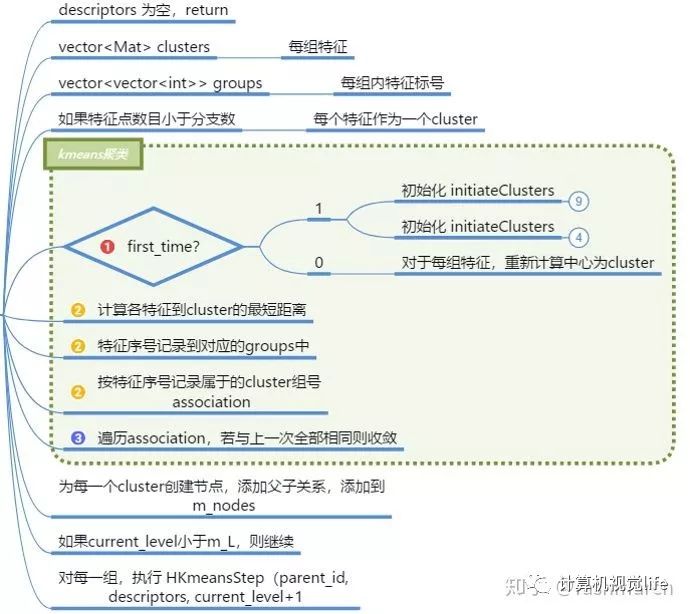
构建树:
主要就是一个k_means过程,不过每层都要聚类一次,所以有一个递归。
构建单词
寻找叶节点,添加为单词
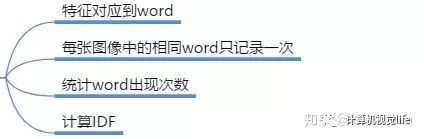
计算权重
每个字典的IDF是不变的,所以在这里计算IDF部分的权重
该函数将一帧图像转换为单词表示
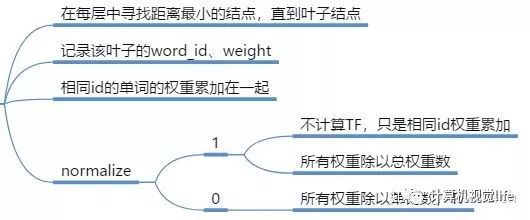
当然这里默认是要normalize的
我们再来看一下权重计算公式
normalize之前我们相当于计算的是

我们将它归一化,而没必要计算准确的TF,但也相当于综合考虑了TF和IDF。
计算两帧相似度的评分
寻找具有相同单词的权重按公式计算即可。
参考文献:
[1] 高翔 《视觉SLAM十四讲》
[2] D. Nister and H. Stewenius, “Scalable recognition with a vocabulary tree,”in 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), vol. 2, pp. 2161–2168, IEEE, 2006.
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~