
面试官为什么喜欢问 HashMap 和 ConcurrentHashMap ?
点击“开发者技术前线”,选择“星标”
让一部分开发者看到未来

数组
线性链表
对于链表的新增,删除等操作(在找到指定操作位置后),仅需处理结点间的引用即可,时间复杂度为O(1),而查找操作需要遍历链表逐一进行比对,复杂度为O(n)
二叉树
数组
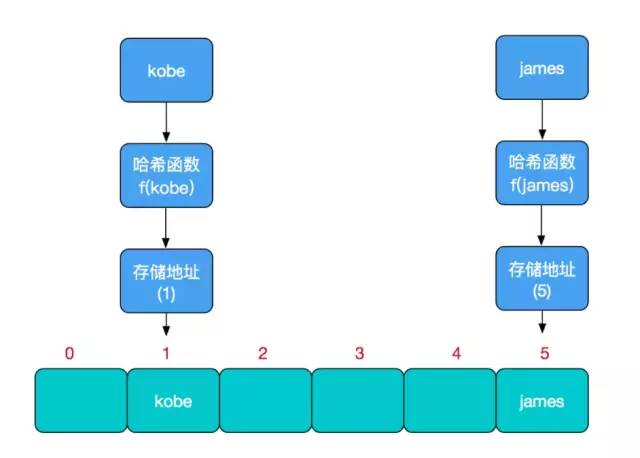
哈希函数的设计至关重要,好的哈希函数会尽可能地保证 计算简单和散列地址分布均匀,但是不可能设计出一个绝对完美的哈希函数,我们需要清楚的是,数组是一块连续的固定长度的内存空间,再好的哈希函数也不能保证得到的存储地址绝对不发生冲突。
JDK7 使用了数组+链表的方式
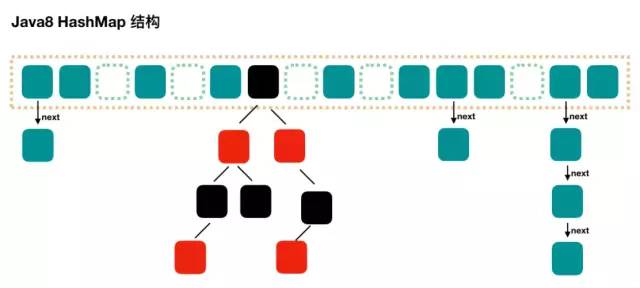
JDK8 使用了数组+链表+红黑树的方式
HashMap的主干是一个Entry数组。Entry是HashMap的基本组成单元,每一个Entry包含一个key-value键值对。
transient Entry<K,V>[] table = (Entry<K,V>[]) EMPTY_TABLE;
static class Entry<K,V> implements Map.Entry<K,V> {final K key;V value;Entry<K,V> next;//存储指向下一个Entry的引用,单链表结构int hash;//对key的hashcode值进行hash运算后得到的值,存储在Entry,避免重复计算/*** Creates new entry.*/Entry(int h, K k, V v, Entry<K,V> n) {value = v;next = n;key = k;hash = h;}
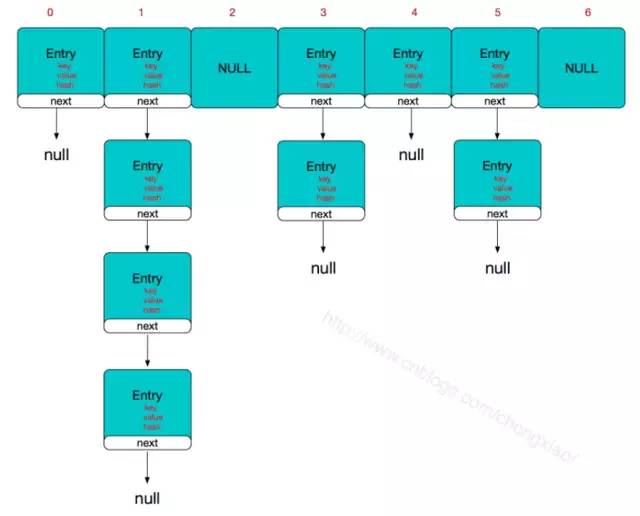
解决冲突的链表的长度影响到HashMap查询的效率
简单来说,HashMap由数组+链表组成的,数组是HashMap的主体,链表则是主要为了解决哈希冲突而存在的,如果定位到的数组位置不含链表(当前entry的next指向null),那么对于查找,添加等操作很快,仅需一次寻址即可;如果定位到的数组包含链表,对于添加操作,其时间复杂度为O(n),首先遍历链表,存在即覆盖,否则新增;对于查找操作来讲,仍需遍历链表,然后通过key对象的equals方法逐一比对查找。所以,性能考虑,HashMap中的链表出现越少,性能才会越好。
发生冲突关于entry节点插入链表还是链头呢?
JDK7:插入链表的头部,头插法
JDK8:插入链表的尾部,尾插法
JDK7
public V put(K key, V value) {if (key == null)return putForNullKey(value);int hash = hash(key.hashCode());int i = indexFor(hash, table.length);for (Entry<K,V> e = table[i]; e != null; e = e.next) {Object k;if (e.hash == hash && ((k = e.key) == key || key.equals(k))) {V oldValue = e.value;e.value = value;e.recordAccess(this);return oldValue;}}modCount++;addEntry(hash, key, value, i);return null;}
voidaddEntry(int hash, K key, V value, int bucketIndex) {Entry<K,V> e = table[bucketIndex];table[bucketIndex] = new Entry<K,V>(hash, key, value, e);if (size++ >= threshold)resize(2 * table.length);}
int h, K k, V v, Entry<K,V> n) {value = v;next = n;key = k;hash = h;}
JDK8
//e是p的下一个节点if ((e = p.next) == null) {//插入链表的尾部p.next = newNode(hash, key, value, null);//如果插入后链表长度大于8则转化为红黑树if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1sttreeifyBin(tab, hash);break;}
为了减少hash值的碰撞,需要实现一个尽量均匀分布的hash函数,在HashMap中通过利用key的hashcode值,来进行位运算。

/*** Returns index for hash code h.*/static int indexFor(int h, int length) {return h & (length-1);}
1.计算"book"的hashcode
十进制 : 3029737
二进制 : 101110001110101110 1001
十进制 : 15
二进制 : 1111
101110001110101110 1001 & 1111 = 1001
1001的十进制 : 9,所以 index=9
现在,我们假设HashMap的长度是10,重复刚才的运算步骤:
hashcode : 101110001110101110 1001
length - 1 : 1001
index : 1001
hashcode : 101110001110101110 1111
length - 1 : 1001
index : 1001
2.HashMap扩容限制的负载因子为什么是0.75呢?为什么不能是0.1或者1呢?
threshold = (int)(capacity * loadFactor);void addEntry(int hash, K key, V value, int bucketIndex) {if ((size >= threshold) && (null != table[bucketIndex])) {resize(2 * table.length);//当size超过临界阈值threshold,并且即将发生哈希冲突时进行扩容hash = (null != key) ? hash(key) : 0;bucketIndex = indexFor(hash, table.length);}createEntry(hash, key, value, bucketIndex);}
如果负载因子为0.5甚至更低的可能的话,最后得到的临时阈值明显会很小,这样的情况就会造成分配的内存的浪费,存在多余的没用的内存空间,也不满足了哈希表均匀分布的情况。
如果负载因子达到了1的情况,也就是Entry数组存满了才发生扩容,这样会出现大量的哈希冲突的情况,出现链表过长,因此造成get查询数据的效率。
因此选择了0.5~1的折中数也就是0.75,均衡解决了上面出现的情况。
区别
使用一个Node数组取代了JDK7的Entry数组来存储数据,这个Node可能是链表结构,也可能是红黑树结构;
如果插入的元素key的hashcode值相同,那么这些key也会被定位到Node数组的同一个格子里,如果不超过8个使用链表存储;
超过8个,会调用treeifyBin函数,将链表转换为红黑树。那么即使所有key的hashcode完全相同,由于红黑树的特点,查找某个特定元素,也只需要O(logn)的开销。
put
和 Java7 稍微有点不一样的地方就是,Java7 是先扩容后插入新值的,Java8 先插值再扩容,不过这个不重要。
get
计算 key 的 hash 值,根据 hash 值找到对应数组下标: hash & (length-1)
判断数组该位置处的元素是否刚好就是我们要找的,如果不是,走第三步
判断该元素类型是否是 TreeNode,如果是,用红黑树的方法取数据,如果不是,走第四步 遍历链表,直到找到相等(==或equals)的 key
JDK7下的CurrentHashMap
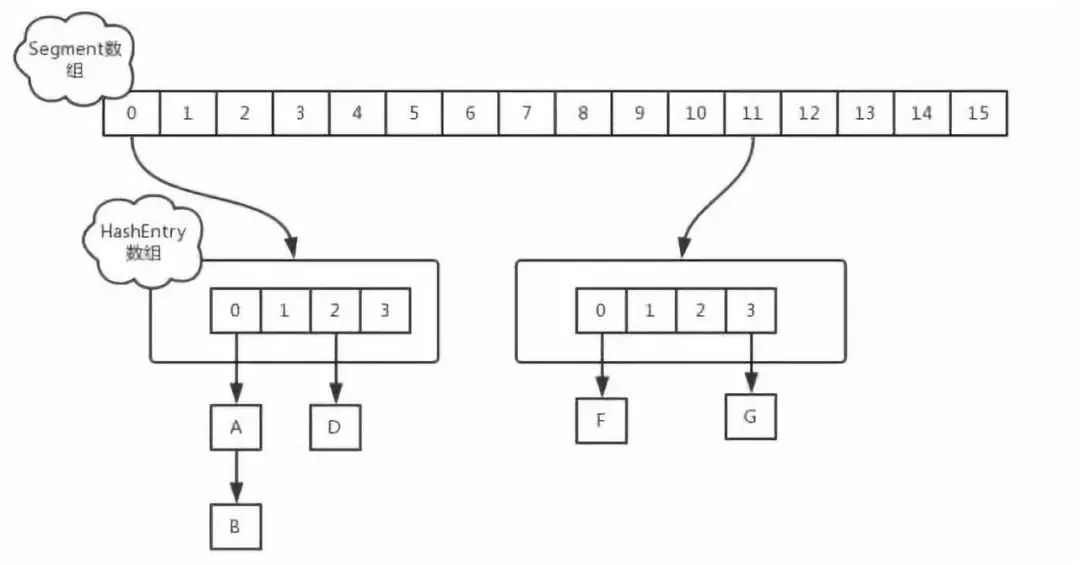
ConcurrentHashMap 与HashMap和Hashtable 最大的不同在于:put和 get 两次Hash到达指定的HashEntry,第一次hash到达Segment,第二次到达Segment里面的Entry,然后在遍历entry链表.
初始化
private static final int DEFAULT_CONCURRENCY_LEVEL = 16;private void writeObject(java.io.ObjectOutputStream s)throws java.io.IOException {// For serialization compatibility// Emulate segment calculation from previous version of this classint sshift = 0;int ssize = 1;while (ssize < DEFAULT_CONCURRENCY_LEVEL) {++sshift;ssize <<= 1;}int segmentShift = 32 - sshift;int segmentMask = ssize - 1;
int cap = 1;while (cap < c)cap <<= 1
put操作
staticclass Segment<K,V> extends ReentrantLock implements Serializable {private static final long serialVersionUID = 2249069246763182397L;final float loadFactor;Segment(float lf) { this.loadFactor = lf; }}
get操作
size 返回ConcurrentHashMap元素大小
try {for (;;) {if (retries++ == RETRIES_BEFORE_LOCK) {for (int j = 0; j < segments.length; ++j) ensureSegment(j).lock(); // force creation}sum = 0L;size = 0;overflow = false;for (int j = 0; j < segments.length; ++j) {Segment<K,V> seg = segmentAt(segments, j);if (seg != null) { sum += seg.modCount; int c = seg.count; if (c < 0 || (size += c) < 0)overflow = true;} }if (sum == last) break;last = sum; } }finally {if (retries > RETRIES_BEFORE_LOCK) {for (int j = 0; j < segments.length; ++j)segmentAt(segments, j).unlock();}}
1、第一种方案他会使用不加锁的模式去尝试多次计算ConcurrentHashMap的size,最多三次,比较前后两次计算的结果,结果一致就认为当前没有元素加入,计算的结果是准确的.
2、第二种方案是如果第一种方案不符合,他就会给每个Segment加上锁,然后计算ConcurrentHashMap的size返回.
JDK8的ConcurrentHashMap

// node数组最大容量:2^30=1073741824private static final int MAXIMUM_CAPACITY = 1 << 30;// 默认初始值,必须是2的幕数private static final int DEFAULT_CAPACITY = 16//数组可能最大值,需要与toArray()相关方法关联static final int MAX_ARRAY_SIZE = Integer.MAX_VALUE - 8;//并发级别,遗留下来的,为兼容以前的版本private static final int DEFAULT_CONCURRENCY_LEVEL = 16;// 负载因子private static final float LOAD_FACTOR = 0.75f;// 链表转红黑树阀值,> 8 链表转换为红黑树static final int TREEIFY_THRESHOLD = 8;//树转链表阀值,小于等于6(tranfer时,lc、hc=0两个计数器分别++记录原bin、新binTreeNode数量,<=UNTREEIFY_THRESHOLD 则untreeify(lo))static final int UNTREEIFY_THRESHOLD = 6;static final int MIN_TREEIFY_CAPACITY = 64;private static final int MIN_TRANSFER_STRIDE = 16;private static int RESIZE_STAMP_BITS = 16;// 2^15-1,help resize的最大线程数private static final int MAX_RESIZERS = (1 << (32 - RESIZE_STAMP_BITS)) - 1;// 32-16=16,sizeCtl中记录size大小的偏移量private static final int RESIZE_STAMP_SHIFT = 32 - RESIZE_STAMP_BITS;// forwarding nodes的hash值static final int MOVED = -1;// 树根节点的hash值static final int TREEBIN = -2;// ReservationNode的hash值static final int RESERVED = -3;// 可用处理器数量static final int NCPU = Runtime.getRuntime().availableProcessors();//存放node的数组transient volatile Node<K,V>[] table;/*控制标识符,用来控制table的初始化和扩容的操作,不同的值有不同的含义*当为负数时:-1代表正在初始化,-N代表有N-1个线程正在 进行扩容*当为0时:代表当时的table还没有被初始化*当为正数时:表示初始化或者下一次进行扩容的大小private transient volatile int sizeCtl;
static class Node<K,V> implements Map.Entry<K,V> {final int hash;final K key;volatile V val;volatile Node<K,V> next;Node(int hash, K key, V val, Node<K,V> next) {this.hash = hash;this.key = key;this.val = val;this.next = next;}public final K getKey() { return key; }public final V getValue() { return val; }public final int hashCode() { return key.hashCode() ^ val.hashCode(); }public final String toString(){ return key + "=" + val; }public final V setValue(V value) {throw new UnsupportedOperationException();}public final boolean equals(Object o) {Object k, v, u; Map.Entry<?,?> e;return ((o instanceof Map.Entry) &&(k = (e = (Map.Entry<?,?>)o).getKey()) != null &&(v = e.getValue()) != null &&(k == key || k.equals(key)) &&(v == (u = val) || v.equals(u)));}/*** Virtualized support for map.get(); overridden in subclasses.*/Node<K,V> find(int h, Object k) {Node<K,V> e = this;if (k != null) {do {K ek;if (e.hash == h &&((ek = e.key) == k || (ek != null && k.equals(ek))))return e;} while ((e = e.next) != null);}return null;}}
static final class TreeNode<K,V> extends Node<K,V> {TreeNode<K,V> parent; // red-black tree linksTreeNode<K,V> left;TreeNode<K,V> right;TreeNode<K,V> prev; // needed to unlink next upon deletionboolean red;TreeNode(int hash, K key, V val, Node<K,V> next,TreeNode<K,V> parent) {super(hash, key, val, next);this.parent = parent;}Node<K,V> find(int h, Object k) {return findTreeNode(h, k, null);}/*** Returns the TreeNode (or null if not found) for the given key* starting at given root.*/final TreeNode<K,V> findTreeNode(int h, Object k, Class<?> kc) {if (k != null) {TreeNode<K,V> p = this;do {int ph, dir; K pk; TreeNode<K,V> q;TreeNode<K,V> pl = p.left, pr = p.right;if ((ph = p.hash) > h)p = pl;else if (ph < h)p = pr;else if ((pk = p.key) == k || (pk != null && k.equals(pk)))return p;else if (pl == null)p = pr;else if (pr == null)p = pl;else if ((kc != null ||(kc = comparableClassFor(k)) != null) &&(dir = compareComparables(kc, k, pk)) != 0)p = (dir < 0) ? pl : pr;else if ((q = pr.findTreeNode(h, k, kc)) != null)return q;elsep = pl;} while (p != null);}return null;}}
5、因为粒度降低了,在相对而言的低粒度加锁方式,synchronized并不比ReentrantLock差,在粗粒度加锁中ReentrantLock可能通过Condition来控制各个低粒度的边界,更加的灵活,而在低粒度中,Condition的优势就没有了
6、JVM的开发团队从来都没有放弃synchronized,而且基于JVM的synchronized优化空间更大,使用内嵌的关键字比使用API更加自然
7、在大量的数据操作下,对于JVM的内存压力,基于API的ReentrantLock会开销更多的内存,虽然不是瓶颈,但是也是一个选择依据。
最后给读者整理了一份大厂面试真题,需要的可扫码微信加备注:“大厂面试”获取。

END
后台回复“面试” “资料” 领取一份干货,数百技术面试手册等你 开发者技术前线 ,汇集技术前线快讯和关注行业趋势,大厂干货,是开发者经历和成长的优秀指南。
历史推荐
为什么蚂蚁金服的 ZSearch 比 ElasticSearh 还牛?
为什么 HashMap 默认加载因子非得是0.75?
为什么ArrayList集合中不能使用foreach增删改?
为什么不建议 for 循环里 String ++? 

好文点个在看吧!
最后给读者整理了一份大厂面试真题,需要的可扫码微信加备注:“大厂面试”获取。
后台回复“面试” “资料” 领取一份干货,数百技术面试手册等你 开发者技术前线 ,汇集技术前线快讯和关注行业趋势,大厂干货,是开发者经历和成长的优秀指南。