
一文深入浅出cv中的Attention机制
1. 直观理解Attention
想象一个场景,你在开车(真开车!握方向盘的那种!非彼开车!),这时候下雨了,如下图。

那你想要看清楚马路,你需要怎么办呢?dei !很聪明,打开雨刮器就好!

那我们可以把这个雨刮器刮雨的动作,就是寻找Attention区域的过程!嗯!掌声鼓励下自己,你已经理解了Attention机制!
2. 再看Attention机制
首先,我们引入一个概念叫做Key
dict = {'name' : 'canshi'} #name为canshi
回忆一下,在中学时期,我们学的眼睛成像!一张图在眼睛中是一个倒立的缩放图片,然后大脑把它正过来了。我们开始进行建模,假设这个自然界存在的东西就是Key,同时也叫Value。
套下公式,当下雨的时候,冷冷的冰雨在车窗上狠狠的拍!我们把这个整个正在被拍的车窗叫做Key,同时也叫Value。但是我们看不清路呀,我们这时候就想让我们可以分得清路面上的主要信息就好,也不需要边边角角的信息。那么这个时候,雨刮器出场了,我们把它叫做Query! 我们就能得到一个看清主要路面的图片了!
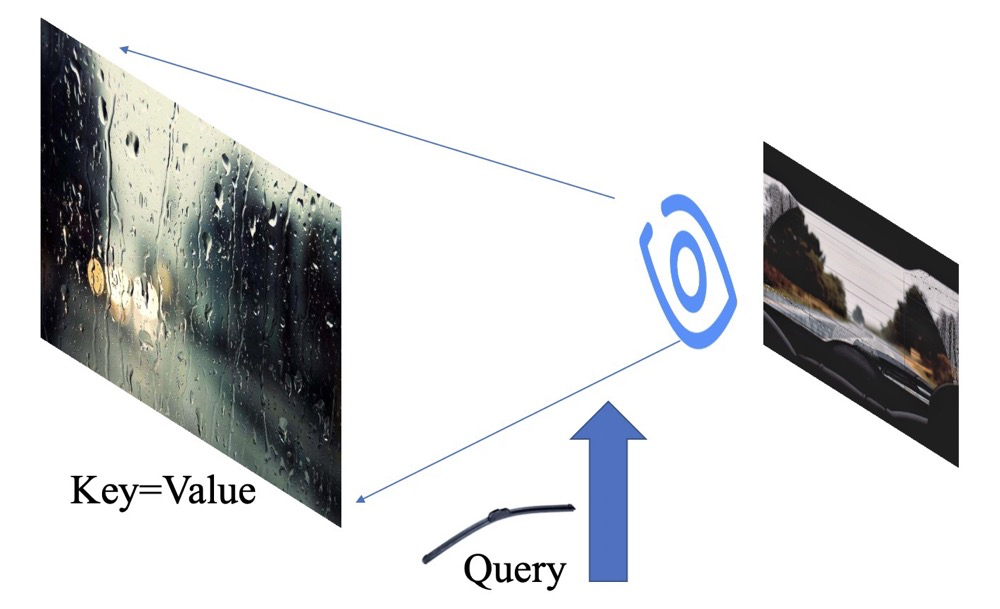
那么到底发生了什么了呢?我来拆开下哈:
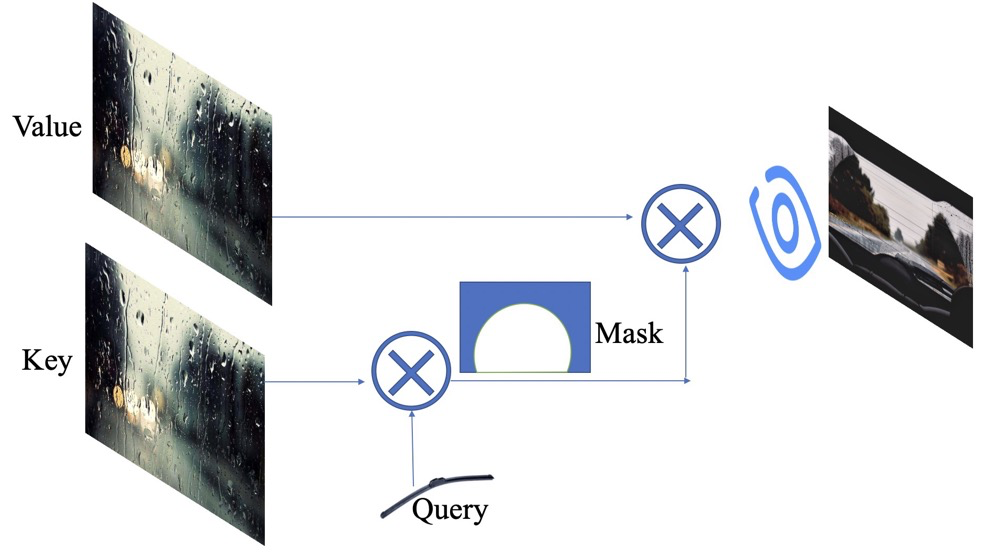
所以,我们通过雨刮器()来作用于车窗图(), 得到了一个部分干净的图像(类,里面的值是0~1),图片中白色区域表示擦干净了,其它部分表示不用管。再用这个生成的 与 图做乘积,得到部分干净的生成图像,显示在我们的大脑中。
因此,我们会看到一些说的博客会有下面的图:
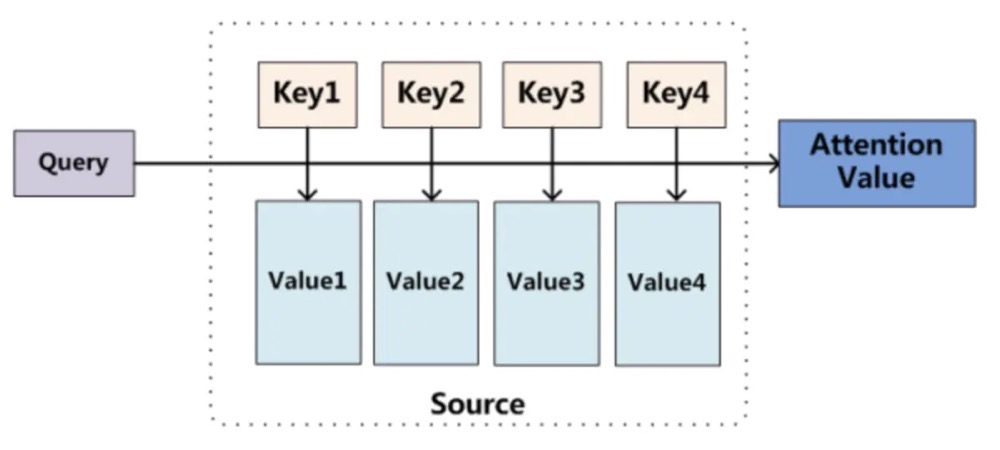
这张图主要是针对于机器翻译中用的,在翻译的时候,每一个输出需要于输入的各个元素计算相似度,再与 进行加权求和~
对于领域中,我们一般都是用矩阵运算了,不像中的任务,需要按照时刻进行,中的任务,就是一个矩阵运算,一把梭就完事儿了。
比如这个雨刮器刮水的过程。我们把原先带是雨水的车窗记作,雨刮器来刮雨就是,我们使用相似度来代替刮水的过程,得到一个。再用与原图像通过计算,得到最后的图像。
因此,用公式来概括性地描述就是:
划重点,不同的车有不同的雨刷来进行刮雨,同样,我们有不同的方法来衡量相似度,这里我们主要有以下几种方案来衡量相似度:
当有了相似度之后,我们需要对其进行归一化,将原始计算分值整理成所有元素权重之和为1的概率分布,越重要的部分,越大!越不重要的部分,越小。我们采用为主,当然也有一些使用这样来进行运算,都是ok的~
因此,这个权重的值可以这么计算:
其中表明将数据进行下缩放,防止过大了。
最后就是得到的输出了:

因此,像戴眼镜,也是一种,。对于眼睛里的区域进行进行聚焦,而除此之外的区域,就无所谓了。不需要进行额外处理了。
3. 大脑中的Attention机制
人在成长过程中,可能每一个阶段都会对大脑进行训练,让我们在大自然界中快速得到我们想要的信息。当前大数据时代,那么多图片视频,我们需要快速浏览得到信息,比如下面的图:

我可能一开始就会注意到这个大衣是很好的款式,这个红色的小包也不错,当然每个人用来训练的数据集是不一样的,我也不知道你们第一眼看到的是啥!毕竟这个注意力矩阵,需要海量的数据来进行测试。

哦?还跟我拗?那你也来试试下面的挑战?
原视频来自 B站,非P站!


3. CV中常用的Attention
1. Non-local Attention
通过上面的例子,我们就明白了,原来本质就是在一个维度上进行计算权重矩阵。这个维度如果是空间,那么就是Spatial Attention, 如果是通道这个维度,那么就是Channel Attention。所以,如果以后你投稿的时候,再说你不够,我们就可以搭积木搭出来一个模块呀!
这里我们使用 来讲解下,常用在领域中的Attention。
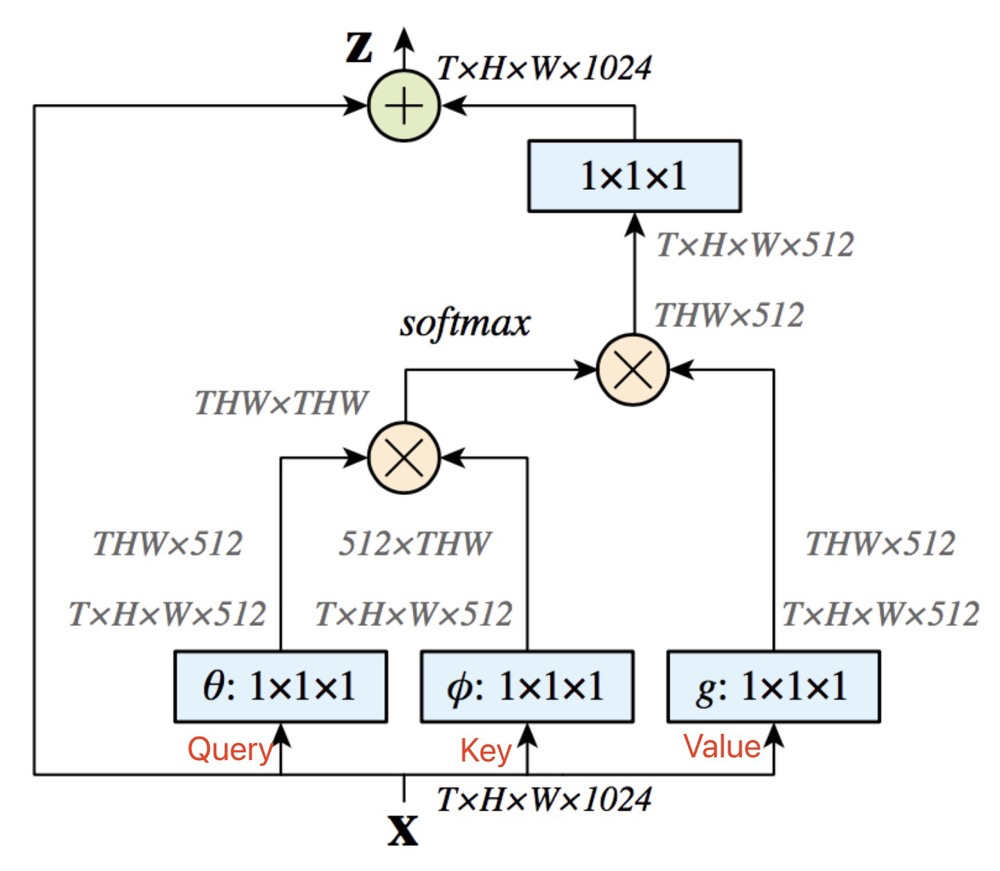
输入特征,通过卷积来得到,这里的三个矩阵是不同的,因此上文中是假设 相同。
其中代码如下:
class Self_Attn(nn.Module):
""" Self attention Layer"""
def __init__(self,in_dim,activation):
super(Self_Attn,self).__init__()
self.chanel_in = in_dim
self.activation = activation
self.query_conv = nn.Conv2d(in_channels = in_dim , out_channels = in_dim//8 , kernel_size= 1)
self.key_conv = nn.Conv2d(in_channels = in_dim , out_channels = in_dim//8 , kernel_size= 1)
self.value_conv = nn.Conv2d(in_channels = in_dim , out_channels = in_dim , kernel_size= 1)
self.gamma = nn.Parameter(torch.zeros(1))
self.softmax = nn.Softmax(dim=-1) #
def forward(self,x):
"""
inputs :
x : input feature maps( B X C X W X H)
returns :
out : self attention value + input feature
attention: B X N X N (N is Width*Height)
"""
m_batchsize,C,width ,height = x.size()
proj_query = self.query_conv(x).view(m_batchsize,-1,width*height).permute(0,2,1) # B X CX(N)
proj_key = self.key_conv(x).view(m_batchsize,-1,width*height) # B X C x (*W*H)
energy = torch.bmm(proj_query,proj_key) # transpose check
attention = self.softmax(energy) # BX (N) X (N)
proj_value = self.value_conv(x).view(m_batchsize,-1,width*height) # B X C X N
out = torch.bmm(proj_value,attention.permute(0,2,1) )
out = out.view(m_batchsize,C,width,height)
out = self.gamma*out + x
return out,attention
代码看上去还是比较容易懂得,主要就是函数,它可以将纬度为矩阵与的矩阵相乘的到的矩阵。再使用来得到归一化之后的矩阵,结合残差,得到最后的输出!
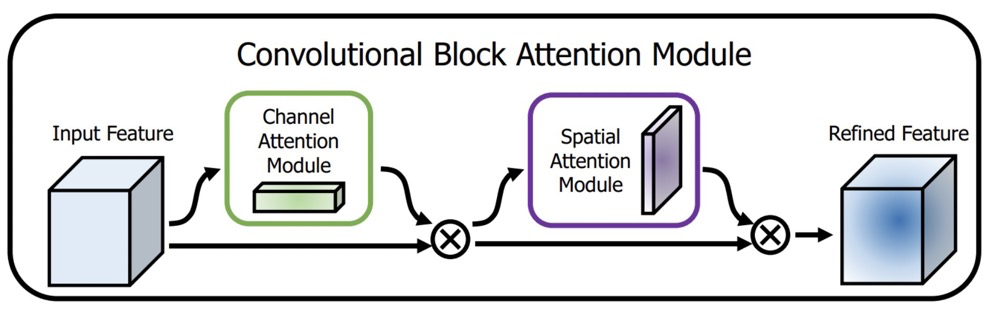
2. CBAM
由 与 组合而成。
其中的 模块,主要是从C x H x w 的纬度,学习到一个C x 1 x 1的权重矩阵。
论文中的图如下:
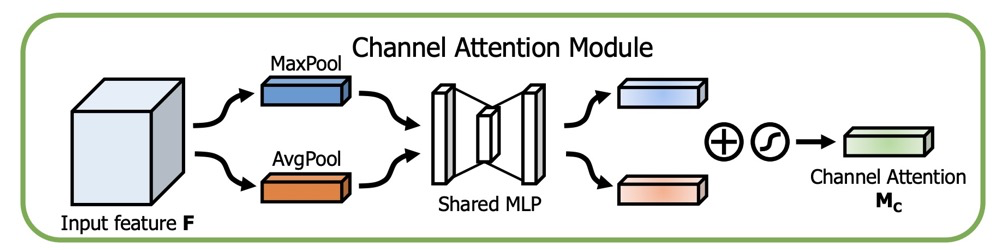
代码示例如下:
class ChannelAttentionModule(nn.Module):
def __init__(self, channel, reduction=16):
super(ChannelAttentionModule, self).__init__()
mid_channel = channel // reduction
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.max_pool = nn.AdaptiveMaxPool2d(1)
self.shared_MLP = nn.Sequential(
nn.Linear(in_features=channel, out_features=mid_channel),
nn.ReLU(inplace=True),
nn.Linear(in_features=mid_channel, out_features=channel)
)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avgout = self.shared_MLP(self.avg_pool(x).view(x.size(0),-1)).unsqueeze(2).unsqueeze(3)
maxout = self.shared_MLP(self.max_pool(x).view(x.size(0),-1)).unsqueeze(2).unsqueeze(3)
return self.sigmoid(avgout + maxout)
当然,我们可以使用的形式来对它进行修改成一个统一架构,只要我们可以学习到一个在通道纬度上的分布矩阵就好。
如下方伪代码, 均为卷积生成。
# key: (N, C, H, W)
# query: (N, C, H, W)
# value: (N, C, H, W)
key = key_conv(x)
query = query_conv(x)
value = value_conv(x)
mask = nn.softmax(torch.bmm(key.view(N, C, H*W), query.view(N, C, H*W).permute(0,2,1)))
out = (mask * value.view(N, C, H*W)).view(N, C, H, W)
对于 ,如图所示:
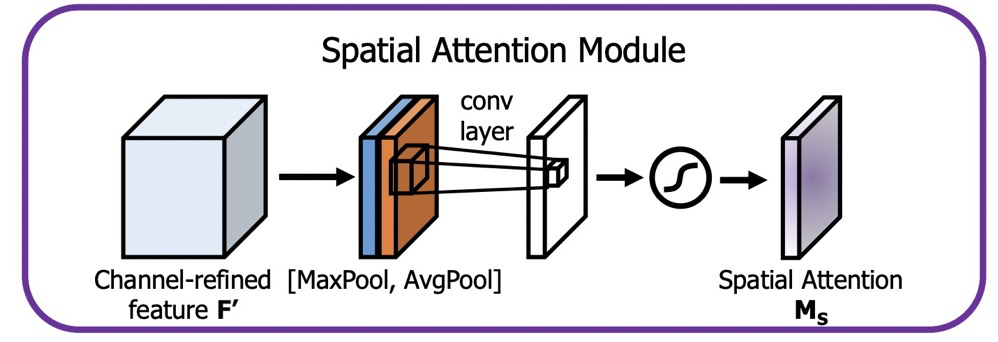
参考代码如下:
class SpatialAttentionModule(nn.Module):
def __init__(self):
super(SpatialAttentionModule, self).__init__()
self.conv2d = nn.Conv2d(in_channels=2, out_channels=1, kernel_size=7, stride=1, padding=3)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avgout = torch.mean(x, dim=1, keepdim=True)
maxout, _ = torch.max(x, dim=1, keepdim=True)
out = torch.cat([avgout, maxout], dim=1)
out = self.sigmoid(self.conv2d(out))
return out
采用的框架来进行改写:
key = key_conv(x)
query = query_conv(x)
value = value_conv(x)
b, c, h, w = t.size()
query = query.view(b, c, -1).permute(0, 2, 1)
key = key.view(b, c, -1)
value = value.view(b, c, -1).permute(0, 2, 1)
att = torch.bmm(query, key)
if self.use_scale:
att = att.div(c**0.5)
att = self.softmax(att)
x = torch.bmm(att, value)
x = x.permute(0, 2, 1)
x = x.contiguous()
x = x.view(b, c, h, w)
3. cgnl
论文分析了下如 与 均不能很好的描述特征之间的关系,这里比较极端得生成了N * 1 * 1 * 1的.
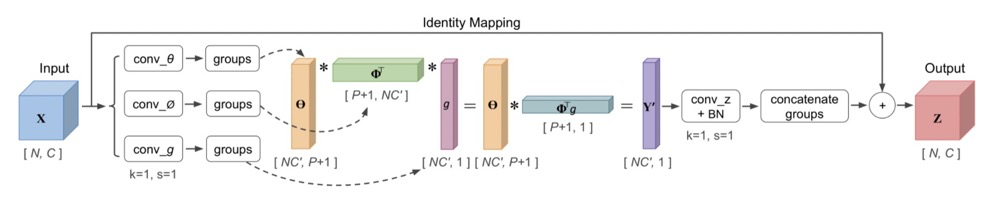
主要关于计算的部分代码:
def kernel(self, t, p, g, b, c, h, w):
"""The linear kernel (dot production).
Args:
t: output of conv theata
p: output of conv phi
g: output of conv g
b: batch size
c: channels number
h: height of featuremaps
w: width of featuremaps
"""
t = t.view(b, 1, c * h * w)
p = p.view(b, 1, c * h * w)
g = g.view(b, c * h * w, 1)
att = torch.bmm(p, g)
if self.use_scale:
att = att.div((c*h*w)**0.5)
x = torch.bmm(att, t)
x = x.view(b, c, h, w)
return x
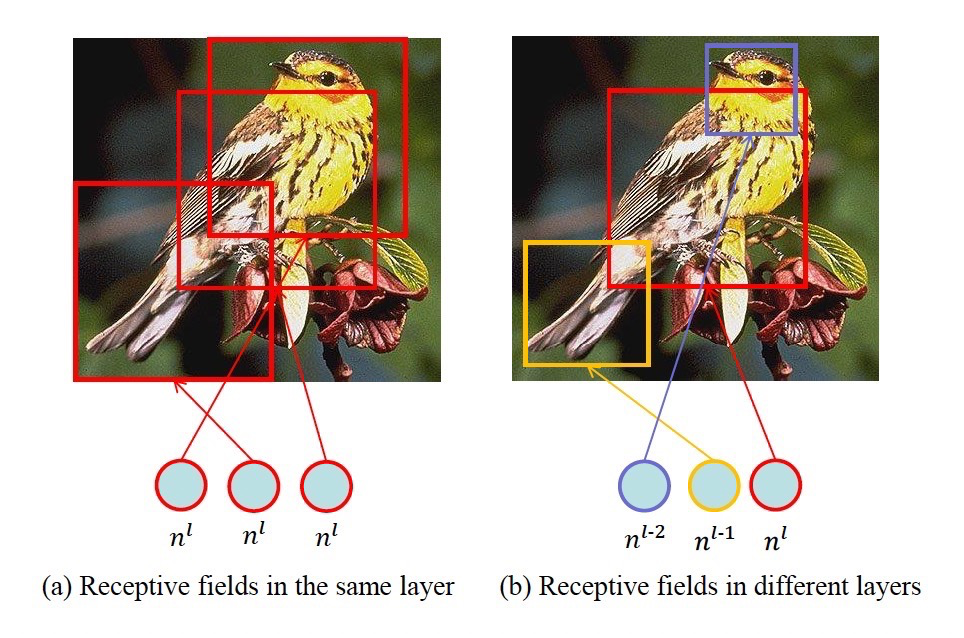
4. Cross-layer non-local
论文中分析了,同样的层之间进行计算,感受野重复,会造成冗余,引入背景噪声,如左边的部分图。而右边的图表示不同层间的感受野不同,计算全局会关注到更合理的区域。
这里采用跨层之间的生成。
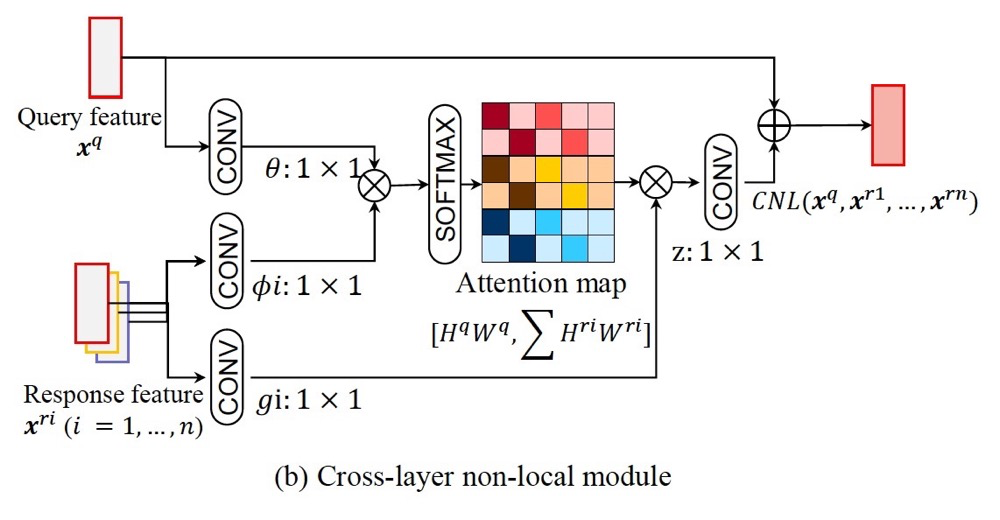
代码部分比较有意思:
# query : N, C1, H1, W1
# key: N, C2, H2, W2
# value: N, C2, H2, W2
# 首先,需要使用1 x 1 卷积,使得通道数相同
q = query_conv(query) # N, C, H1, W1
k = key_conv(key) # N, C, H2, W2
v = value_conv(value) # N, C, H2, W2
att = nn.softmax(torch.bmm(q.view(N, C, H1*W1).permute(0, 1, 2), k.view(N, C, H2 * W2))) # (N, H1*W1, H2*W2)
out = att * value.view(N, C2, H2*W2).permute(0, 1, 2) #(N, H1 * W1, C)
out = out.view(N, C1, H1, W1)
4. 小结
是一个比较适合用来写文章的知识点,算是一个的点。目前针对中的差不多可以概括为这些,后面会继续补充,欢迎各位关注!
- END -往期精彩回顾
本站qq群851320808,加入微信群请扫码: