
星链StarLink终端信号分析和信关站设计图


一代Starlink终端拆箱视频
StarLink卫星的相控天线可以形成并发射几十个独立的波束。在向国际电联提交的最新版StarLink中,统计了一下有48种波束配置。它们全部同时工作并不是事实,也许这些只是卫星天线具备的多波束能力。
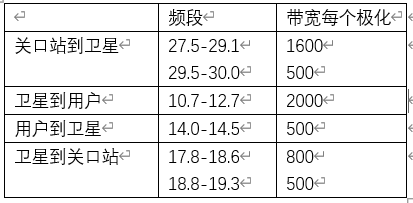
可以肯定的是,关口站在每个极化大约2000 MHz(8个480 MHz的波束)向Ka波段的卫星发送信号,从卫星到用户终端的一个波束的宽度为240 MHz。总共,我们可以同时从卫星发射16条波束,宽度为240 MHz(用户终端只能以一种极化方式进行接收)。
Starlink 工作原理,可以看一下这个视频
星下位置覆盖地表波束区域的直径沿线大约为24 km-3dB(出自SpaceX报告)。随着波束的偏离,其直径增加,因为相控天线阵列的方向图的角度略有增加。在对应于用户终端仰角25度仰角,波束覆盖直径超过70 km。
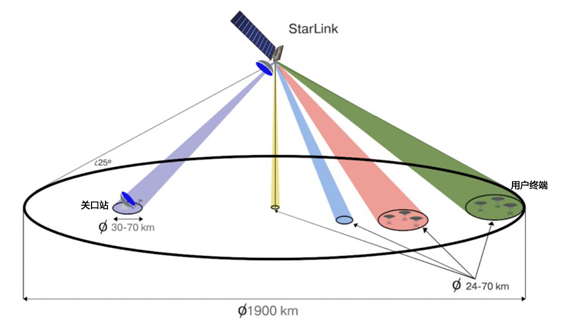
如果我们采用的波束直径为24 km(或452平方公里的面积),并且每颗卫星上16束波束,那么对于美国(或53个平行线之间的区域)的覆盖率为100%,我们将需要41480颗卫星。这显然是错误的,因为SpaceX承诺将在该项目的第一阶段使用1584颗卫星来做到这一点(覆盖美国大陆100%的覆盖率)。
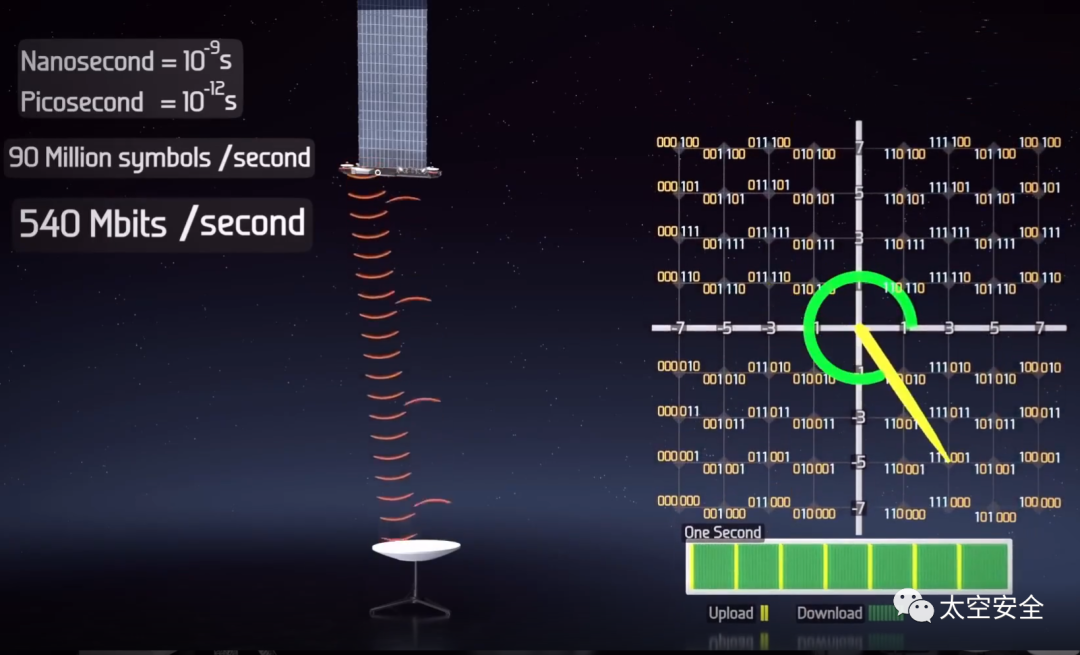
在测试过程中测得的StarLink网络中的最大速度为240 Mbps。这是在2020年秋季,频段为240 MHz,几乎没有负载,最近(2021年初),当用户越来越多时,再也没有这样的“记录”了。几乎看不到测试结果超过170Mbps(这是240 MHz带宽)的结果。StarLink网络中的信噪比为9-10 dB,对应于8PSK调制和3位/ Hz的频谱效率。也就是说,从卫星到用户终端的方向上的信息速度大约在720 Mbit左右,而用户现在获得的速度不到200 Mbit。
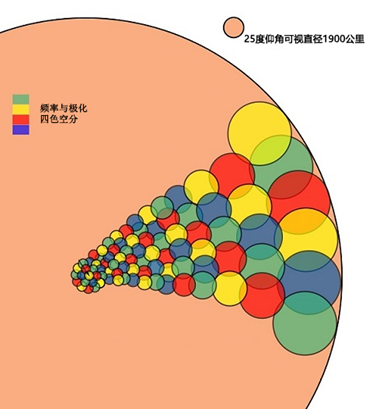
这么少的波束和卫星如何覆盖这么大的面积?StarLink网络与标准卫星网络的明显差异。波束一定范围内按小区跳跃,15秒内(这是在重新计算卫星相对于终端的位置以及重新分配哪个终端给哪个卫星时间周期)每个波束指向在某个范围(凝视)。比如跳跃图案可以是:小区交替为7-8-9-7-8-9-7-8-9,期间会涉及到关口站的切换,每个区域的操作时间不应短于框架(数据包)的长度。
例如,假设帧/数据包的长度是10毫秒。这样的帧包含720Mbit * 0.01秒= 7.2兆比特= 900千字节的信息。您还可以将轮询速率提高到每1毫秒1次,然后数据包/帧大小将为100 kB信息。在这种情况下,帧/分组将包含该波束中所有用户终端的信息。但是,如果某小区中只有一个终端在线,那么所有这些kB都是他的。根据每波束的负载,理论上可能会更改小区跳跃图案:由7-8-9-7-8-9切换为7-8-9-8-7-8-9-8,这样第8单元中的终端的速度比第7或9单元中“终端”的速度快2倍。


接受beta版的用户严格按照地理位置接收邀请-居住在SpaceX认可为“已服务”的小区中,并且用户接受每天中断几分钟网络,随着在轨卫星的数量及其上的带宽资源的增加,SpaceX“打开”一个个新的“小区”进行服务,并将邀请发送给居住在其中的用户。
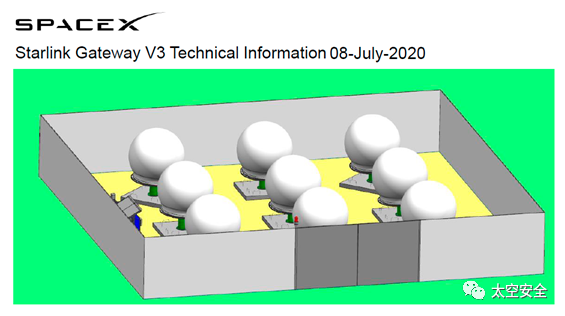
Starlink网络的关口站有8个天线,每个天线都可以向其“自己的”卫星发送信息

通常,关口站也有用户终端,用于控制目的,检查在给定不同天气条件服务区域内调制方式。

星间激光链路切换、跟踪、瞄准的时间应该在秒级以上,StarLink星间激光采取的是4个方向固定式激光链
用Starlink卫星导航
我们提出了两种利用未知Starlink信号进行导航的方法。
第一种方法依赖于Starlink卫星传输的单个或多个载波信号。基于自适应卡尔曼滤波器(KF)的锁相环(PLL)算法,从接收到的卫星信号中提取载波相位观测值。
在第二种方法中,Starlink信号被捕获和跟踪,而无需信号的任何先验知识。这种方法考虑了传输同步信号的更通用的模型,以提供多普勒导航观测值。
Starlink星历误差
用LEO卫星信号导航时需要考虑的一个误差,来源于对LEO卫星的受力了解不完善。这是由于作用在卫星上的几个扰动加速度引起轨道根数时变。平均轨道根数和扰动加速度包含在公开的TLE文件中。这些文件中的信息可用于初始化简化扰动模型SGP。用SGP(例如,SGP4 )取代复杂的扰动加速度模型来优化计算,这些模型需要用分析式进行数值积分,以将卫星位置从历元时间推估到未来时间。
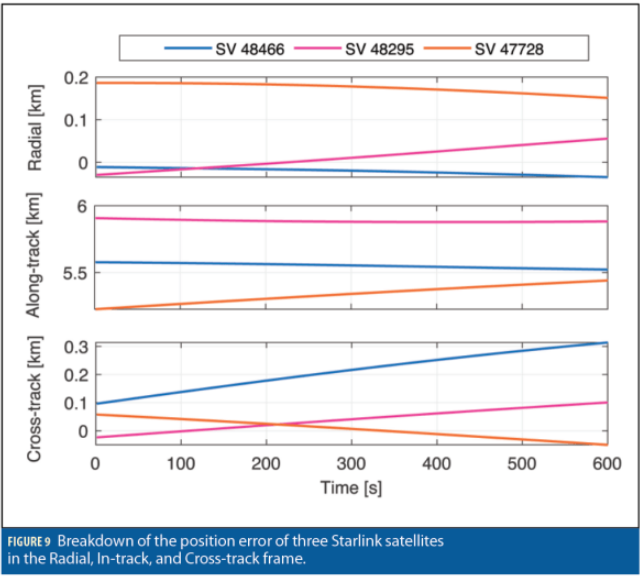
卫星轨道精度:SGP4历元位置误差约为3公里,预报轨道将继续偏离真实轨道,直到第二天更新TLE文件。图9显示了三颗Starlink卫星的轨道误差3个分量。这些误差是用SGP4预报Starlink卫星并与高精度轨道(HPOP)比较而产生的,HPOP使用Starlink发布的状态向量进行初始化。图 9 显示,大部分误差都位于轨道上。
用Starlink载波相位和多普勒定位
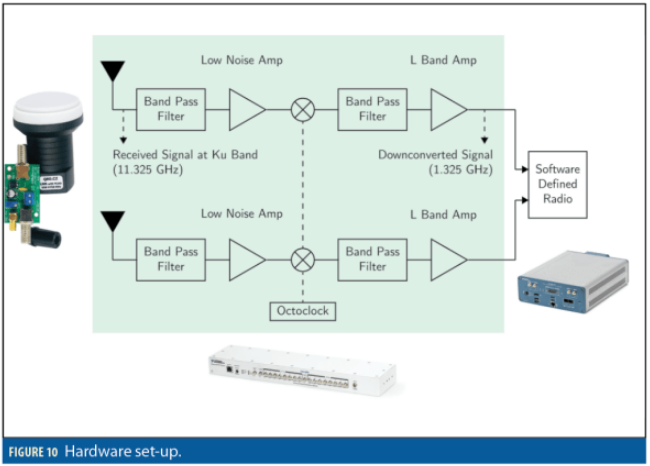
本节介绍Starlink信号的第一个静态定位结果。美国国家仪器 (NI) 通用软件无线电外设 (USRP) 2945R 配备了两个消费级天线和低噪声块 (LNB) 下变频器,可从两个不同角度接收Ku 波段Starlink信号。一个八进制时钟用于同步 USRP 时钟和下变频器。采样率设置为 2.5 MHz,载波频率设置为 11.325 GHz,这是 Starlink 下行链路频率之一。图 10 显示了硬件设置。
通过加权非线性最小二乘(WNLS)估计器,用检测到的六颗Starlink卫星来估计接收器的位置。考虑星历误差,每颗Starlink卫星的TLE历元时间被及时移动,以最小化误差残差。
将所有Starlink卫星位置的中心,投影到地球表面,作为接收器的初始位置,产生的初始位置误差为179公里。时钟偏差和漂移初始化为零。
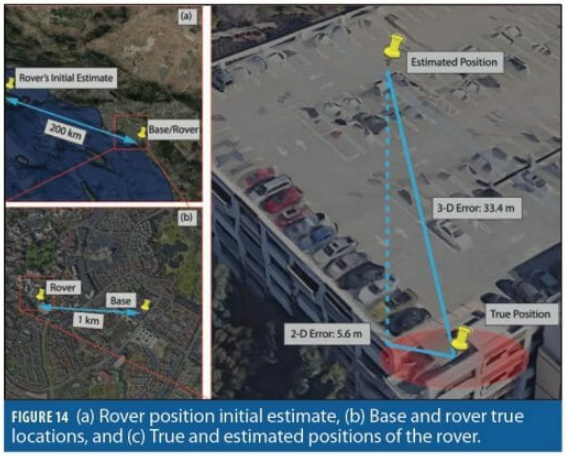
环境布局和定位结果分别如图11和表2所示。方法1和方法2的3D位置误差分别为33.5 m和22.9 m。在为接收器配备高度计(以了解其姿态)后,方法1和方法2的2D位置误差分别降至7.7 m和10 m。


差分多普勒定位
补偿星历误差、电离层和对流层延迟、时钟误差和其他常见模型误差的常用方法是采用由基站和流动车组成的差分模式。在差分多普勒定位中,流动车通过从多普勒测量值中减去Starlink卫星的多普勒测量值来估计其状态,这些测量值由具有已知位置的基站接收器提供。这样可以减少需要估计的未知参数,并减少共模误差的影响。
Starlink差分多普勒测量的实验结果
本节介绍Starlink LEO卫星的差分多普勒测量定位实验结果。
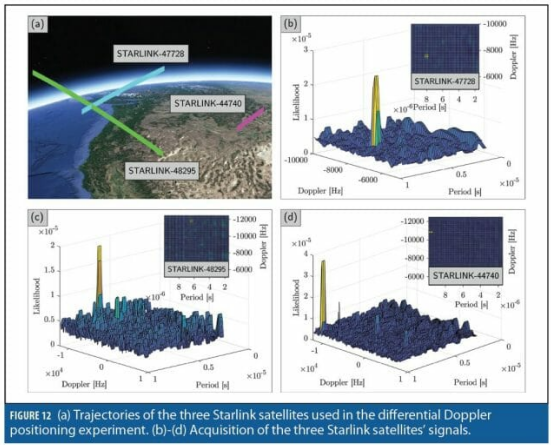
考虑一个静态场景,其中基站配备了Ettus E312 USRP,带有消费级天线和LNB下变频器,以接收Ku波段的Starlink信号,并且流动车配备了带有相同下变频器的USRP 2974。Octoclocks用于在USRP的时钟与基站和流动车的下变频器之间同步。采样率设置为2.5 MHz,载波频率设置为11.325 GHz。在实验过程中,基站和流动车上的接收器正在接收3颗Starlink卫星:Starlink 44740,48295和47728。卫星可见320秒。图12显示了星链下行链路信号的多普勒频率和周期函数。CPI被设定为该时期的200倍。可以看出,在捕获阶段检测到了三颗Starlink LEO卫星。图13显示了三颗卫星测得的差分多普勒。估计的差分多普勒中的尖峰是由于信道中断和突发误差引起的,这在卫星通信中很常见。
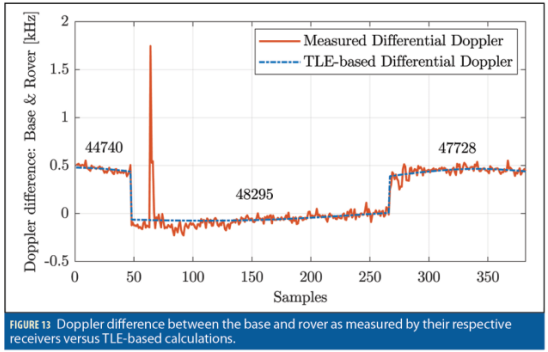
基站和流动车之间的距离是1.004公里。流动车最初的估值与其真实位置相差约200公里。采用差分多普勒定位模式后,发现3D位置误差为33.4 m,而2D位置误差为5.6 m。图14显示了基站和流动车的位置以及流动车的初始估计值及其最终的3D和2D估计值。
同时进行LEO卫星跟踪和地面车辆导航
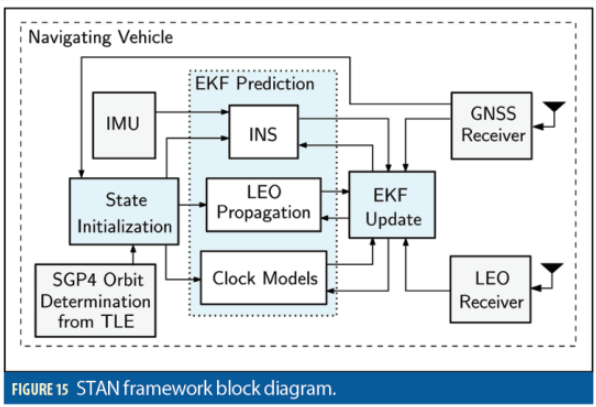
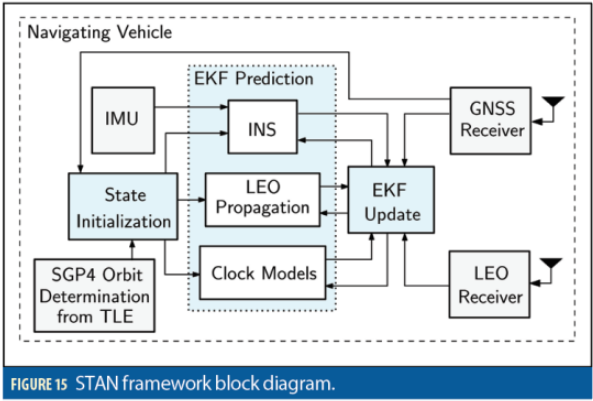
无论是在水上,陆地还是在空中,大多数车辆传统上都依赖于GNSS辅助的惯性导航系统(INS)。这种GNSS/INS集成(可以是松散的、紧密的或深层的)提供了一种导航解决方案,既受益于INS的短期精度,也受益于GNSS的长期稳定性。LEO卫星信号可以作为INS辅助源,从而作为GNSS信号的补充甚至替代方案。GNSS卫星配备了高度稳定的原子钟,在整个网络中同步,并在导航信息中将其星历和时钟误差传输给用户。相比之下,LEO卫星不是为导航目的而设计的。因此,它们的星载时钟不一定是原子钟,也不一定紧密同步。此外,LEO卫星通常不会在其专有信号中公开传输其星历和时钟误差。为了应对这些挑战,提出了同步跟踪和导航(STAN)模式,其中导航车辆的状态与LEO卫星的状态同时估计。
图 15 显示了 STAN 模式框图。
实验结果:使用Starlink和Orbcomm LEO卫星进行地面车辆导航
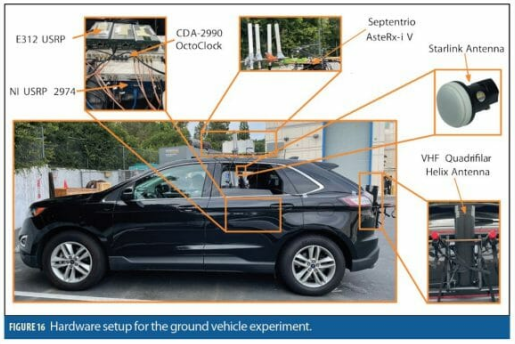
本节介绍实验结果,通过STAN模式展示了3颗Starlink和2颗Orbcomm LEO卫星的地面车辆导航性能。该车辆沿着美国加利福尼亚州的CA-55高速公路行驶,在150秒内行驶了4.15公里。该车辆配备了Septentrio AsteRx-I V集成GNSS-INS系统,VectorNav VN-100微电子机械系统(MEMS)战术级惯性测量单元(IMU),两个连接到USRP-2794的LNB以11.325 GHz采样Starlink卫星信号,以及一个连接到Ettus E312 USRP的VHF天线,用于采样137-138 MHz的Orbcomm信号,如图16所示。
在前80秒内,GNSS信号可用,但在实验的最后70秒被切断,在此期间车辆行驶了1.82公里。GNSS-INS导航解漂移到距离实际轨迹118.5 m,3D位置均方根误差(RMSE),而STAN LEO辅助的INS产生21.6 m的3D位置RMSE。

仿真结果:展望未来
本节介绍仿真结果,展示未来Starlink巨星座在发射12000颗获得FCC批准的LEO卫星时可实现的机会导航性能。一架固定翼无人机配备了战术级IMU,晶体振荡器(OCXO)以及GNSS和Starlink LEO接收器。Starlink接收器对可见的Starlink卫星进行了多普勒测量。Starlink卫星配备了芯片级原子钟(CSAC)。多普勒测量的噪声方差在500-1500 Hz2之间,依据预测的载波噪声比而变化,用卫星的仰角计算。模拟的无人机在性能上与巡航速度约为50 m / s的小型私人飞机相比。无人机飞越美国加利福尼亚州尔湾,飞行300秒,飞行15.43公里。轨迹包括一个直线攀爬段,然后是八字形图案,最后下降一个直线段。无人机最初在1公里的高度爬升到1.5公里的高度,在那里它开始执行滚动和偏航机动,然后在直线段下降到1公里。Starlink卫星状态是使用TLE文件初始化的,用于导航无人机的74颗Starlink LEO卫星的轨迹如图18所示(当卫星在20°遮挡角之外时,轨迹显示为红色,当无人机可见时,轨迹为绿色)。GNSS可用于飞行的前60秒,而带有Starlink卫星的STAN在轨道的最后240秒内没有GNSS。图18给出了仿真结果,表4总结了导航结果。



外部结构

图片来源:视频截图
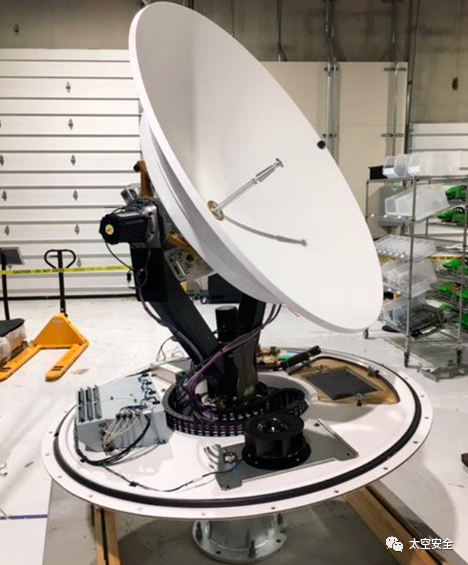
Dish外形是一个圆盘状,直径约19英寸(48.26cm),重量很轻,从视频中可以看到博主一只手就可以拿起来。

图片来源:视频截图+后期备注
在终端的背面安装了支架、驱动电机、网线等结构。两侧两个驱动电机齿轮比较大,同时转速很低,因此只是用来做系统固定安装、卫星空域粗对准时候的微调工作。实质的对星通信、跟星、切星等一些列通信操作都需要用相控阵阵面终端来实现。
同时在外形结构中,整个Dish的边缘、网线的接入口、支架的固定位置、后盖的安装都做了非常细致、严谨的防腐、防潮、防水的设计。(这里就不介绍了)
拆开背板可以看到整个终端系统的覆盖着一层金属背板,大概就是如下所示:
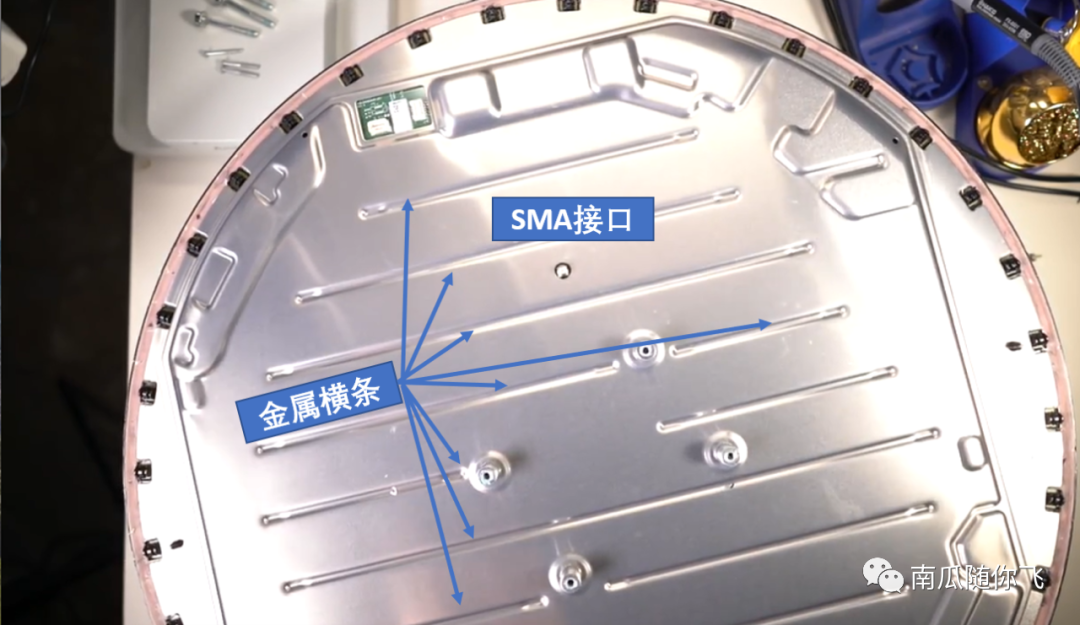
图片来源:视频截图+后期备注
在上面的图中,背板上面留着一个SMA接口,猜测是用来做最后的校准测试的接口,因为在实际的使用中并没有接入任何的线缆。其他的四个孔就只是用来固定支架的四个螺钉孔而已。
可以看到背板上面有横着的金属凹槽,主要设计用来与下层的PCB板子进行粘合,提供固定。当然还需要周围一圈的固定位来实现。
图片来源:视频截图
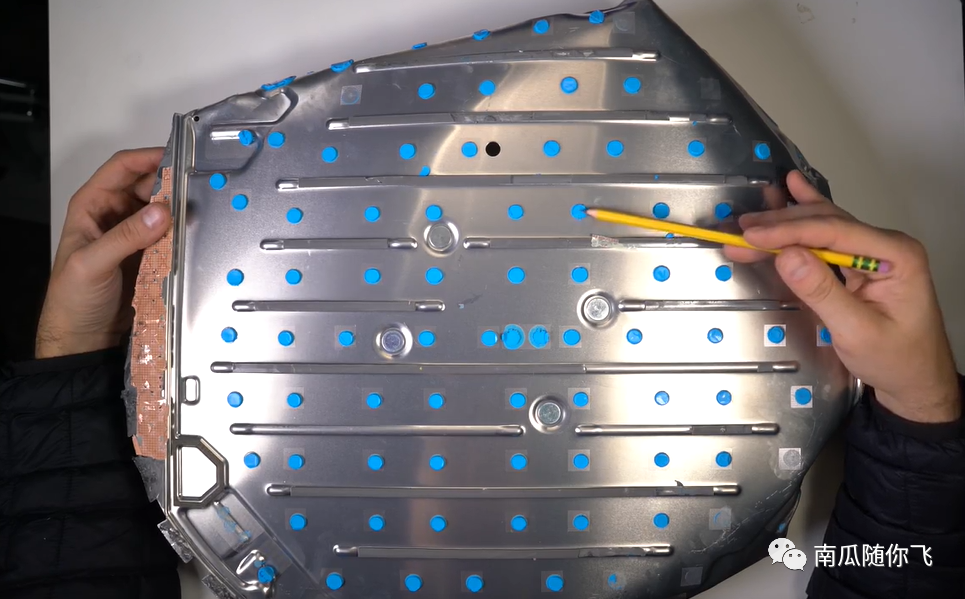
图片来源:视频截图+后期备注
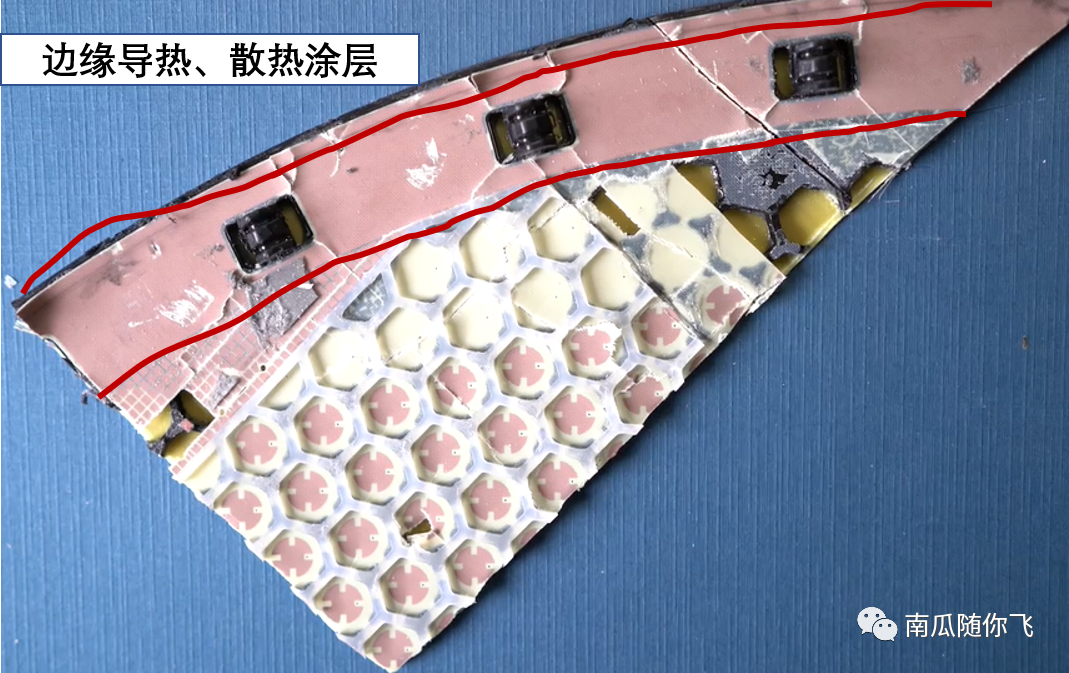
拆开背板翻过来可以看到,金属背板上有一个个蓝色的圆形泡沫,正的位置刚好是PCB板上面的芯片的位置,所以作用就很明显了:用于散热,传导到金属快速散热。将整体的热量传导到边缘实现快速散热、降温。


图片来源:视频截图
这一块金属背板的厚度大约在1.3mm。拆去背板之后可以从视频中看到整个系统的厚度也是非常薄的。
电路拓扑结构
图片来源:视频截图+后期处理
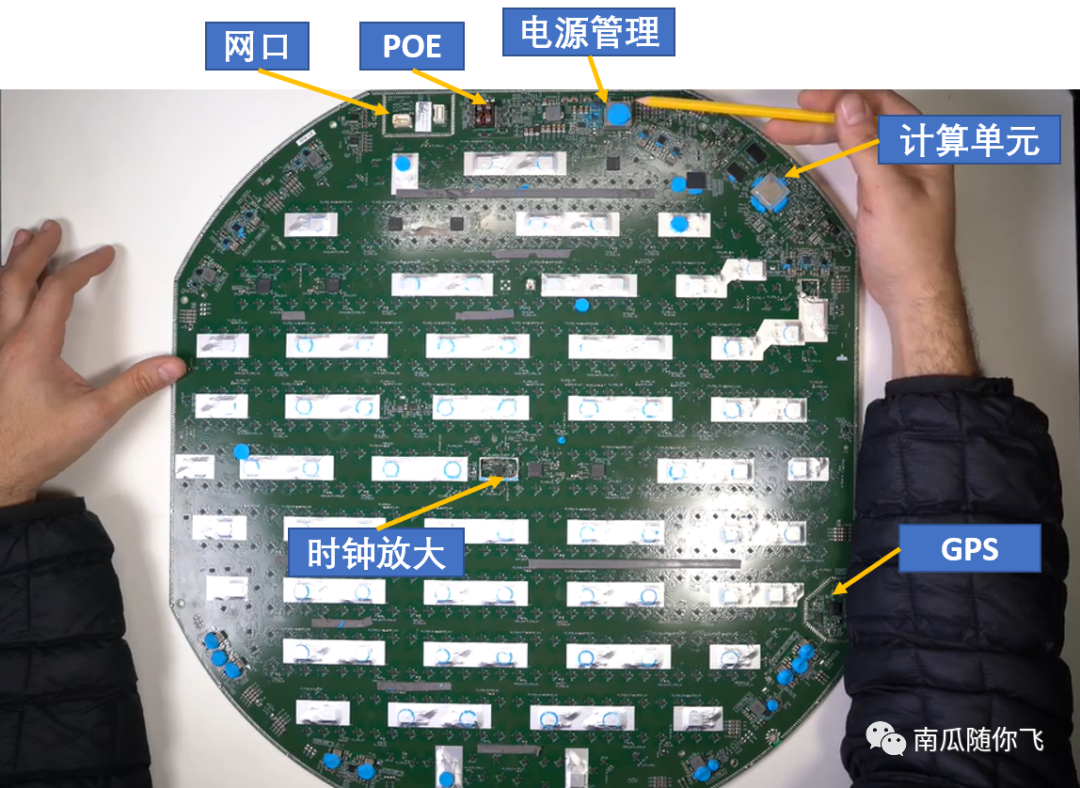
接下来就是电路结构的部分。从视频中可以看到整个背面是倒装表贴了很多芯片。从边缘顺时针的方向依次是:
网口:前面提到的网线的插入口;
POE:Power Over Ethernet,以太网供电,主要基于IP终端传输数据信号时候的供电;
电源管理:为整个板子提供电源,负责不同部件的电源的供电、管理工作;
计算单元:是整个系统的大脑,包括了核心的RAM芯片,EMMC flash等,保存了系统的文件、软件算法等信息;
GPS:包括了一个GPS接收机芯片、2M的Flash等;

640小芯片、20个大芯片

PCB边缘书主CPU和GPS模块
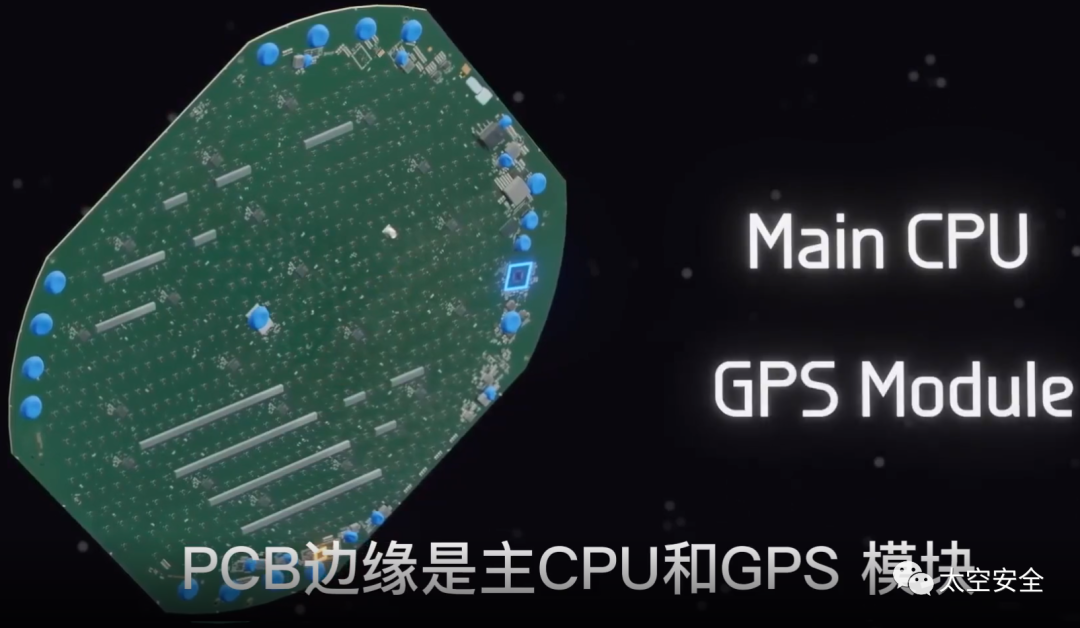
1280根六边形蜂窝天线

640个射频模块组成一个相控雷达

六边形
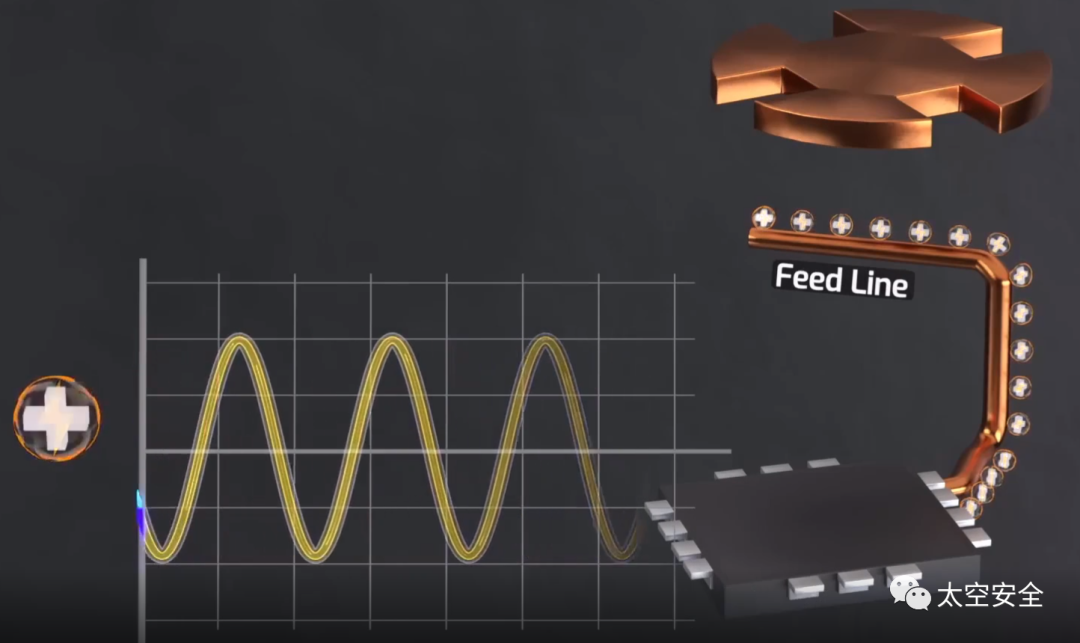
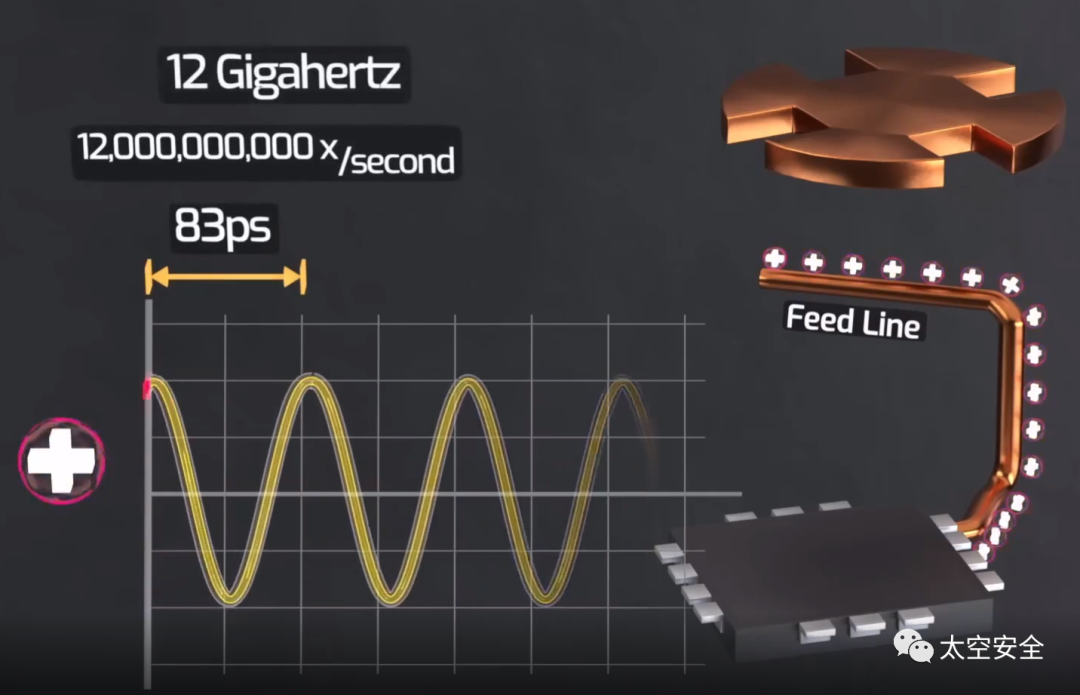
芯片产生信号,给天线
图片来源:视频截图
核心处理器采用了意法半导体的芯片
在板子的中间偏左的位置有一个芯片,猜测是分布式的时钟放大芯片,用于放大时钟信号,给板子上所有通道的芯片提供统一的时钟(60MHz的晶振),板上的所有同步信号共享时钟。
射频链路
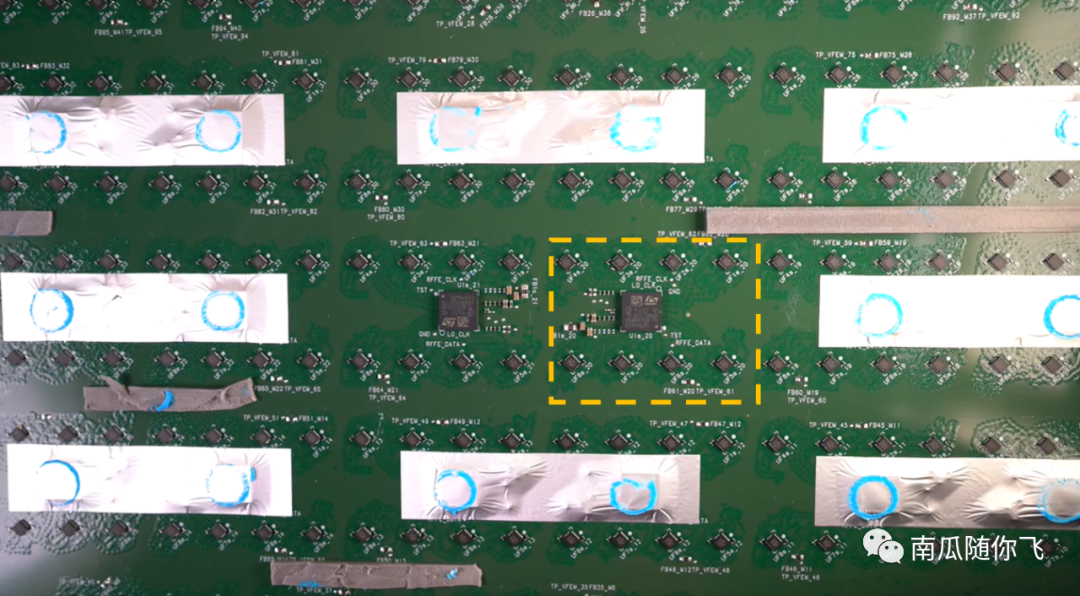
图片来源:视频截图+后期处理
射频链路部分,由两种芯片构成。如上图所示,8个小芯片和其中的一个大芯片构成。根据系统的架构可以初步判断,小的芯片应该是负责T/R的前端芯片,有两个通道,分别带有低噪放和末级功放;大的芯片负责8个小芯片,具有8通道带有调幅、调相、混频等功能。
芯片部分的比例是1:8,总共有79个大芯片,632个小芯片,结合阵面天线单元数量接近1300个阵元,可以猜出每个小芯片覆盖2个单元。其基本的收发链路如下所示。

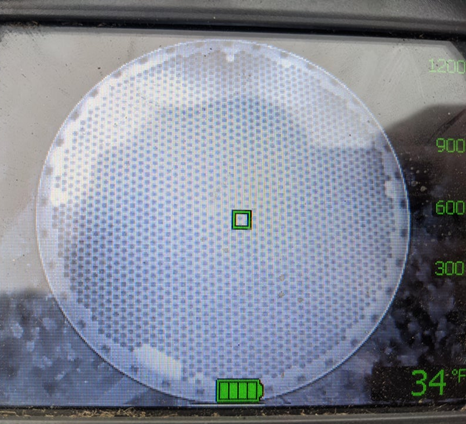
天线阵面

图片来源:视频截图
天线阵面的宽度约50cm,斜宽约54.5cm,阵面的单元采用了三角布局的方案实现。结合其宽度尺寸、宽边单元数量,可以大概猜出其对应波长在25mm左右。因此网上说的接收10.7-12.7GHz、发射14.0-14.5GHz应该是匹配的。
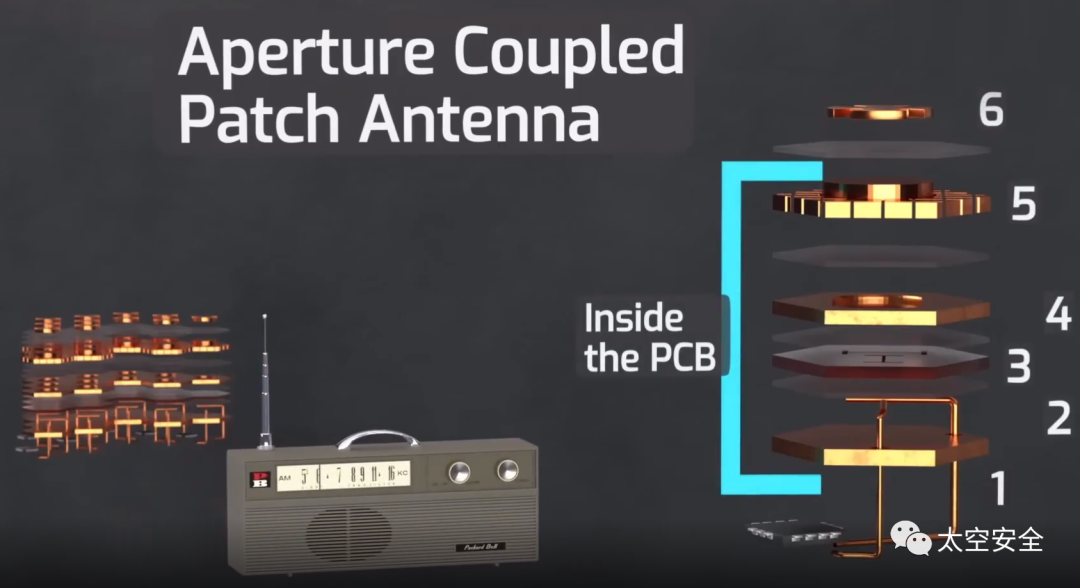
天线单元采用了多层贴片结构,从两个角度拓展了天线阵面的带宽(如下图所示):
利用寄生辐射单元提高增益的同时拓展了微带天线的带宽;
多层天线结构,中间采用空气介质、PCB板材介质等进一步拓展了天线的带宽,实现了30%的相对带宽。

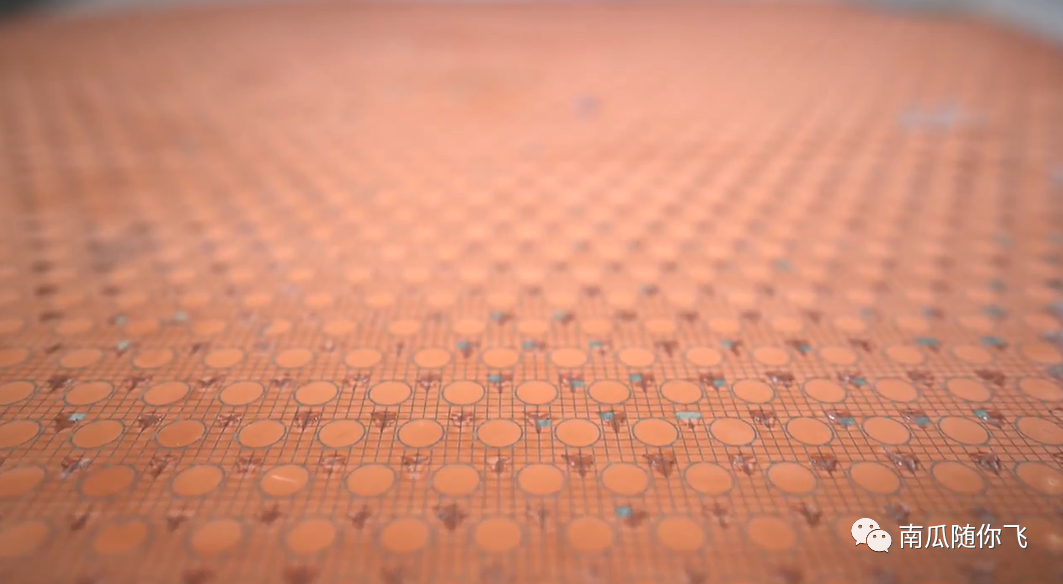
底层天线单元,图片来源:视频截图

表面寄生辐射单元,图片来源:视频截图
从剖面的结构中可以看到,两层天线中间采用了六边形的中空结构支撑起来,实现单元与单元之间空气填充介质效应(低介电常数的介质一方面能够减少损耗,另外一方面能够有效提高带宽)。
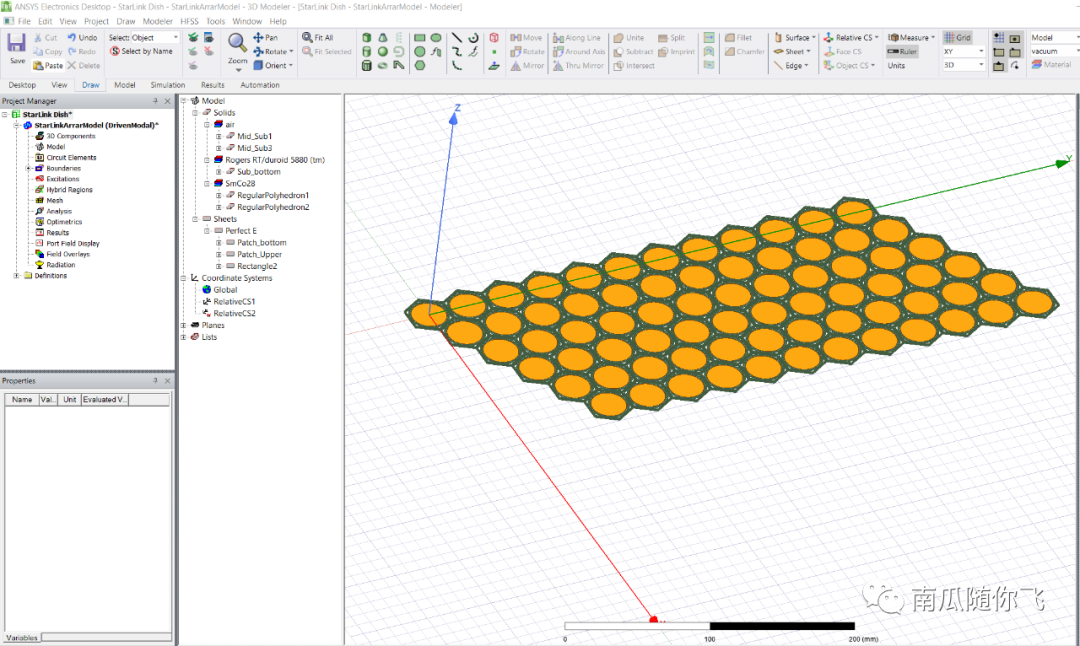
结合视频的信息以及网上的资料显示,小编利用Ansys Electronics Desktop软件对单元和阵面进行了建模,如下图所示。
单元结构如下所示,建模中没有建立出馈电网络的部分,仅做了辐射单元与多层结构之间的关系。
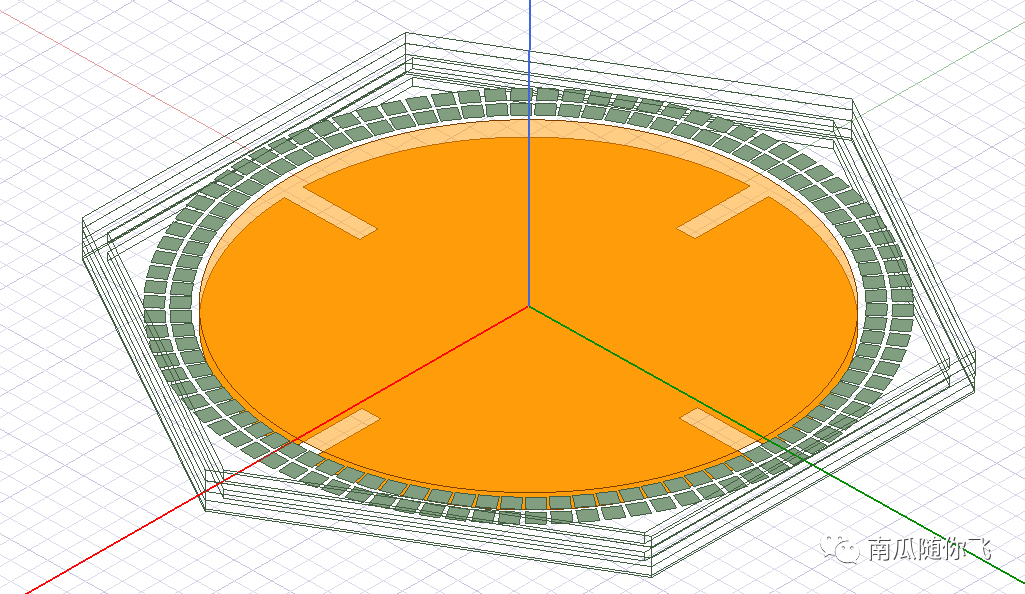
周期拓扑结构如下所示:
为了更方便大家理解多层的结构,小编画了一个侧面的简易示意图,如下所示:

相控阵在扫描过程中经常遇到的问题就是出现扫描盲点的问题(扫到某一个方向就增益突然降低很多)。而这个盲点问题很大程度就是因为阵面单元间的互耦、表面波造成的。采用了这种多层结构的贴片模式,互耦会因为介质原因增强,同时表面波也会在阵面表面形成影响。因此针对这些影响因素,Dish的天线阵面采用了EBG(电子带隙结构)来降低互耦和表面波的影响,从而提高了扫描性能。
图片来源:视频截图
整个天线的上半空余的覆盖角度达到了100°,至于俯仰角度结合机械旋转关节能否覆盖的范围就更广。但是实际应用中机械旋转关节可能在调整好之后就固定不动了,不会利用它来跟星(因为实在是很慢)。
至于网上有其他猜想,该阵面终端不具备切星能力,中断的时候就重新连接,断断续续也可以的说法也是不太靠谱的。整个链路下来,每个单元都可以独立工作,实现波束扫描、多波束等功能,至少是有具备朝这方面扩展的能力。
至于StarLink的专利中提到的结构,更不是现有的Dish采用的结构,所以没有什么可讨论性。

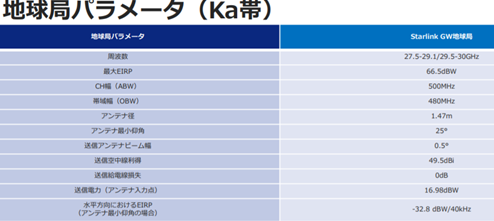
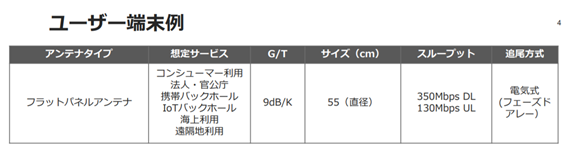
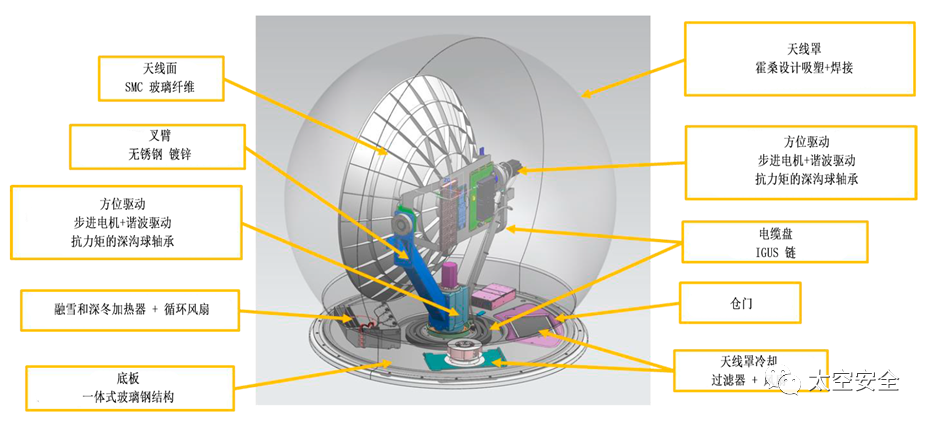
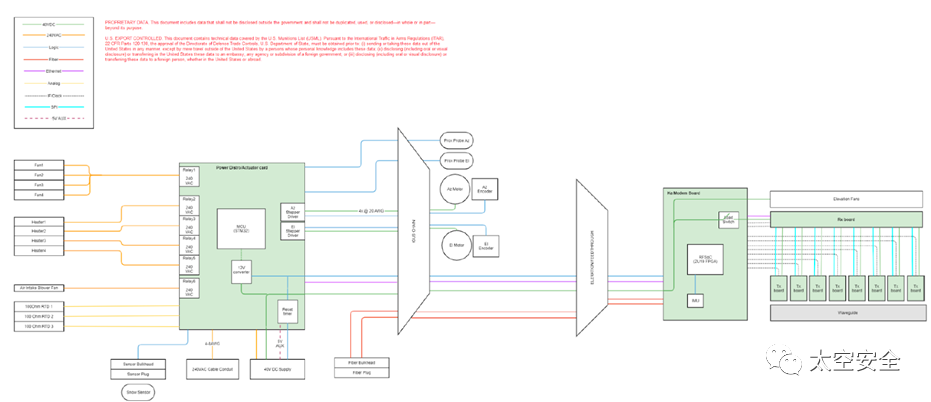
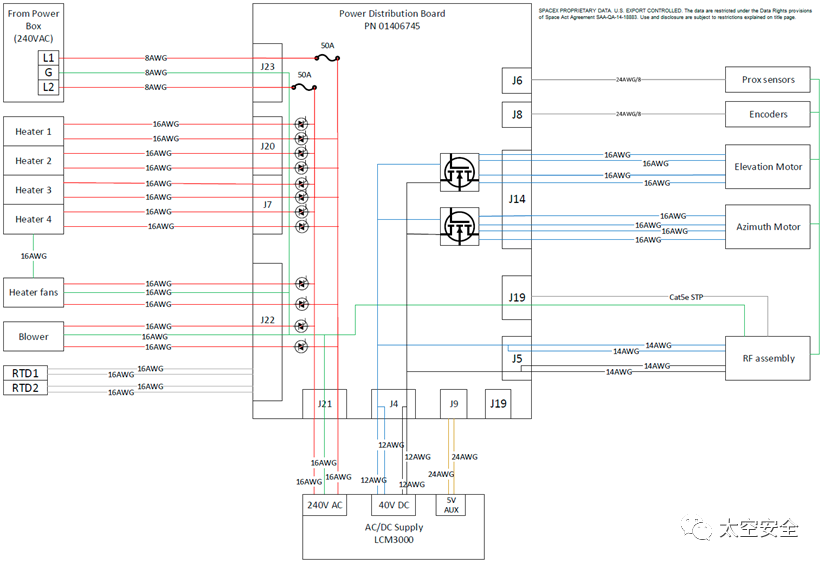
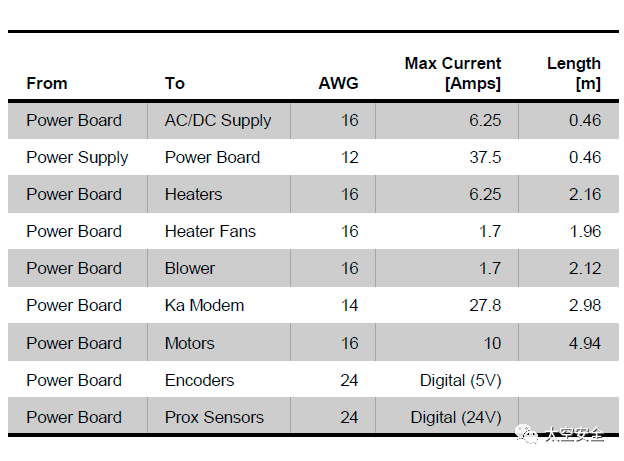
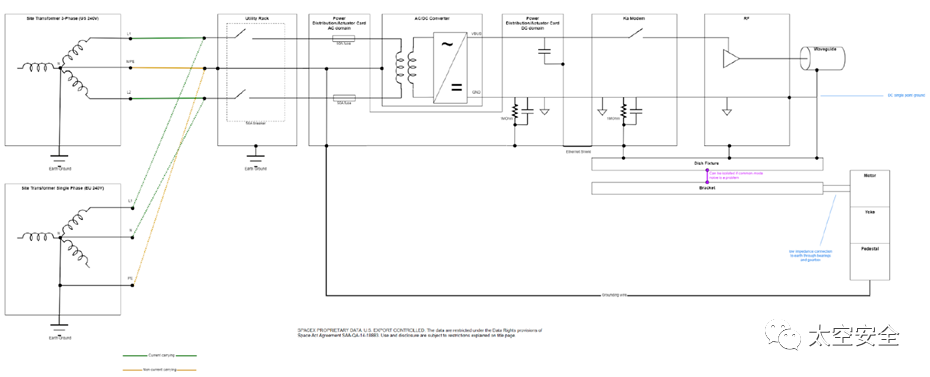
StarLink 信关站资料与图纸


Starlink太阳能板两次展开





>End
>>>
充满激情的新时代,
充满挑战的新疆域,
与踔厉奋发的引领者,
卓尔不群的企业家,
一起开拓,
一起体验,
一起感悟,
共同打造更真品质,
共同实现更高价值,
共同见证商业航天更大的跨越!
——《太空与网络》,观察,记录,传播,引领。
>>>
·《卫星与网络》编辑委员会
高级顾问:王国玉、刘程、童旭东、相振华、王志义、杨烈
· 《卫星与网络》创始人:刘雨菲
· 《卫星与网络》副社长:袁鸿翼,王俊峰