
入门 | 研究自动驾驶技术的算法需要哪些知识?
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
编者荐语
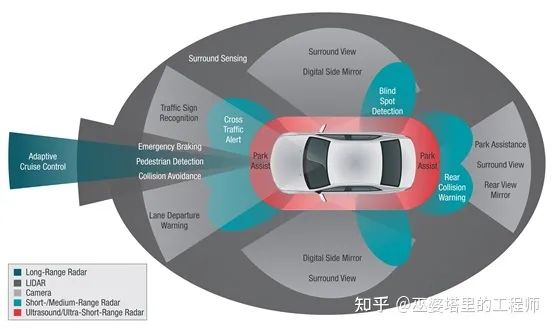
后台有同学询问自动驾驶的技术栈,这里总结知乎的提问与自己的一些认识,对自动驾驶进行一定的介绍。自动驾驶系统包括环境感知和定位,行为预测和规划控制。作为计算机视觉方面的研究人员,这里就只说说环境感知方面需要的知识吧。
整理自丨知乎
链接丨https://www.zhihu.com/question/46575222
1 前言

2 技术概览
3 行业现状
本文仅做学术分享,如有侵权,请联系删文。
评论