锚框(anchor box)理解和代码实现
极市导读
本文对锚框这一概念进行介绍和解释,并给出了相关的代码实现。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
目标检测算法通常会在输入图像中采样大量的区域,然后判断这些区域中是否包含我们感兴趣的目标,并调整区域边界从而更准确地预测目标的真实边界框(ground-truth bounding box)。不同的模型使用的区域采样方法可能不同。这里我们介绍其中的一种方法:以每个像素为中心,生成多个缩放比和宽高比(aspect ratio)不同的边界框。这些边界框被称为锚框(anchor box)。---- 《动手学深度学习v2》
上文表明,锚框不过是图像中采样的区域,也介绍了最简单的一种生成这些区域的方法。此外,目标检测算法会判断这些区域是否有目标,是分类任务。调整这些区域到目标真实框是回归任务。
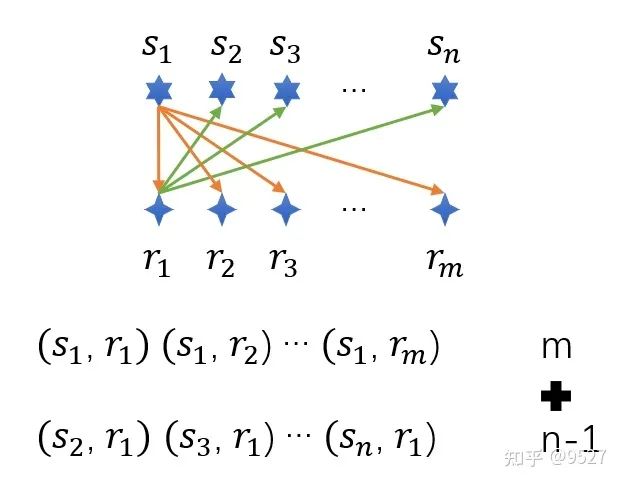
假设输入图像的高度为ℎ,宽度为 。以图像的每个像素为中心生成不同形状的锚框:比例为 ∈(0,1],宽高比为 >0。要生成多个不同形状的锚框,设置一系列刻度 和一系列宽高比 。为了减少计算复杂度,只考虑包含 或 的组合,如下图所示。
推导1:设 w, h 为 图像中锚框的实际宽高, W,H 为图像的宽高。
由 和 和 。
对 和 归一化 和 。
显然,当 H = W 时, , 。
推导2:设 和 为归一化的小数,可得到
公式1: 和 公式2:
和 。与推导1结论相同。
动手学深度学习V2中的代码,当H = W 时,和下面修改的结果是一致的。但当H != W 时, 二者结果并不相同。但是其实二者区别不大,不过是锚框的初始大小区别而已,而这不过是人自定义的。
import torch
from d2l import torch as d2l
# torch.set_printoptions(2) # 精简输出精度
def multibox_prior(data, sizes, ratios):
"""生成以每个像素为中心具有不同形状的锚框"""
in_height, in_width = data.shape[-2:]
device, num_sizes, num_ratios = data.device, len(sizes), len(ratios) # 3, 3
boxes_per_pixel = (num_sizes + num_ratios - 1) # 每个像素的锚框数
size_tensor = torch.tensor(sizes, device=device) # list 转为 tensor
ratio_tensor = torch.tensor(ratios, device=device)
# 为了将锚点移动到像素的中心,需要设置偏移量。
# 因为一个像素的的高为1且宽为1,我们选择偏移我们的中心0.5
offset_h, offset_w = 0.5, 0.5
steps_h = 1.0 / in_height # 在y轴上缩放步长
steps_w = 1.0 / in_width # 在x轴上缩放步长
# 生成锚框的所有中心点
center_h = (torch.arange(in_height, device=device) + offset_h) * steps_h
center_w = (torch.arange(in_width, device=device) + offset_w) * steps_w
shift_y, shift_x = torch.meshgrid(center_h, center_w)
# center_h:tensor([0.1250, 0.3750, 0.6250, 0.8750])
# tensor([
# [0.1250, 0.1250, 0.1250, 0.1250],
# [0.3750, 0.3750, 0.3750, 0.3750],
# [0.6250, 0.6250, 0.6250, 0.6250],
# [0.8750, 0.8750, 0.8750, 0.8750]])
# tensor([
# [0.1250, 0.3750, 0.6250, 0.8750],
# [0.1250, 0.3750, 0.6250, 0.8750],
# [0.1250, 0.3750, 0.6250, 0.8750],
# [0.1250, 0.3750, 0.6250, 0.8750]])
shift_y, shift_x = shift_y.reshape(-1), shift_x.reshape(-1)
# 全部每个像素中心点坐标
# tensor([0.1250, 0.1250, 0.1250, 0.1250, 0.3750, 0.3750, 0.3750, 0.3750, 0.6250,
# 0.6250, 0.6250, 0.6250, 0.8750, 0.8750, 0.8750, 0.8750])
# tensor([0.1250, 0.3750, 0.6250, 0.8750, 0.1250, 0.3750, 0.6250, 0.8750, 0.1250,
# 0.3750, 0.6250, 0.8750, 0.1250, 0.3750, 0.6250, 0.8750])
# 生成“boxes_per_pixel”个高和宽,
# 之后用于创建锚框的四角坐标(xmin,xmax,ymin,ymax)
## 动手学深度学习V2 原始代码
# w = torch.cat((size_tensor * torch.sqrt(ratio_tensor[0]),
# sizes[0] * torch.sqrt(ratio_tensor[1:])))\
# * in_height / in_width # 处理矩形输入
# h = torch.cat((size_tensor / torch.sqrt(ratio_tensor[0]),
# sizes[0] / torch.sqrt(ratio_tensor[1:])))
# # 除以2来获得半高和半宽
# anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(
# in_height * in_width, 1) / 2
## 更新后的代码
w_0 = torch.cat((sizes[0] * torch.sqrt(in_height * ratio_tensor[:] / in_width),
size_tensor[1:] * torch.sqrt(in_height * ratio_tensor[0] / in_width)))
h_0 = torch.cat((sizes[0] * torch.sqrt(in_width / ratio_tensor[:] / in_height),
size_tensor[1:] * torch.sqrt(in_width / ratio_tensor[0] / in_height)))
# 除以2来获得半高和半宽
anchor_manipulations = torch.stack((-w_0, -h_0, w_0, h_0)).T.repeat(
in_height * in_width, 1) / 2
# 每个中心点都将有“boxes_per_pixel”个锚框,
# 所以生成含所有锚框中心的网格,重复了“boxes_per_pixel”次
out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],
dim=1).repeat_interleave(boxes_per_pixel, dim=0)
output = out_grid + anchor_manipulations
return output.unsqueeze(0)
img = d2l.plt.imread('d2l-zh/pytorch/img/catdog.jpg')
h, w = img.shape[:2]
print(h, w)
X = torch.rand(size=(1, 3, 4, 4))
Y = multibox_prior(X, sizes=[0.75, 0.5, 0.25], ratios=[1, 2, 0.5])
print(Y, Y.shape)
显示代码修改
d2l.set_figsize()
bbox_scale = torch.tensor((w, h, w, h))
fig = d2l.plt.imshow(img)
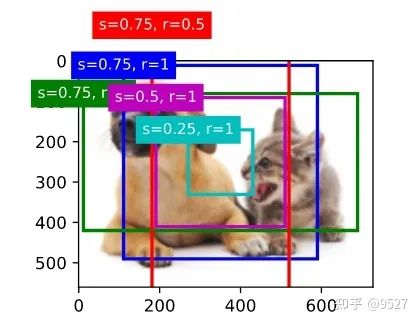
# 上述代码按图1 组合,故下面的顺序作了调整。
# show_bboxes(fig.axes, boxes[250, 250, :, :] * bbox_scale,
# ['s=0.75, r=1', 's=0.5, r=1', 's=0.25, r=1', 's=0.75, r=2',
# 's=0.75, r=0.5'])
show_bboxes(fig.axes, boxes[250, 350, :, :] * bbox_scale,
['s=0.75, r=1', 's=0.75, r=2', 's=0.75, r=0.5', 's=0.5, r=1',
's=0.25, r=1'])
参考:
13.4. 锚框 - 动手学深度学习 2.0.0-beta0 documentation(https://zh-v2.d2l.ai/chapter_computer-vision/anchor.html#id2)
2. 《动手学习深度学习》13.4锚框
公众号后台回复“CVPR 2022”获取论文合集打包下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~