
机器人程序的构成【2】移动速度、定位类型、动作附加指令
一、移动速度
速度倍率值的范围为1~100%
在移动速度中指定的单位,根据动作指令所示教的动作类型而不同。
J P[1]50% FINE
动作类型:关节动作
在1~100%范围内指定。
单位为sec时,在0.1~3200sec范围内指定。移动时间较为重要的情况下进行指定。此外有的情况下不能按照指定时间进行动作。
单位为msec 时,在1~32000msec范围内指定.
L 直线动作 P[1]100mm/sec FINE
动作类型:直线动作,圆弧动作,或者C圆弧动作情况下
单位为mm/sec时,在1~2000mm/sec 范围内指定
单位为cm/min时,在1~12000cm/min 范围内指定
单位为sec时,在0.1~3200sec范围内指定。
单位为msec 时,在1~32000msec范围内指定.
L 直线动作 P[1]50deg/sec FINE
动作类型:在工具中心点回转移动,动作情况下
单位为deg/sec时,在1~272deg/sec 范围内指定
单位为sec时,在0.1~3200sec范围内指定。
单位为msec 时,在1~32000msec范围内指定.
此外还可以通过寄存器指定速度
根据所指定的寄存器值,有时会导致机器人在意想不到的速度下动作,使用本功能的情况下,应注意在示教时 运转时,对所指定的寄存器值进行充分确认。
二、定位类型
两种:
1.FINE定位类型 J P[1] 50% FINE
根据 FINE 定位类型,机器人在目标位置停止(定位)后,向着下一目标位置移动。
2.CNT定位类型 J P[1] 50% CNT 50
根据CNT定位类型,机器人靠近目标位置,但是不在该位置停止而是趋近目标位置后,继续向下一位置动作。
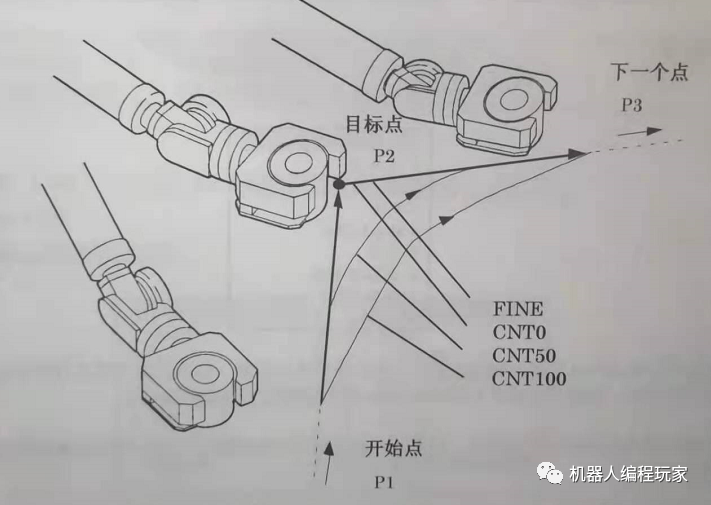
机器人趋近目标位置到什么程度,由0~100之间的值来定义,如图7.7所示。值的指定可以使用寄存器。 寄存器的索引至多可以使用255 。当指定的值为0时,机器人在最靠近目标位置处动作,但是不在目标位置定位而开始下一动作。指定100时,机器人在目标位置附近不减速而马上向着下一点开始动作,并通过最远离目标位置的点。
注意:
(1)在指定了CNT的动作语句后,执行等待指令的情况下,标准设定下机器人会在拐角部分轨迹上停止,执行该指令。
(2)在CNT方式下连续执行距离短而速度快的多个动作的情况下,即使CNT的值为100,也会导致机器人减速。
三、动作附加指令
在机器人动作中使其执行特定作业的指令。有如下:
手腕关节动作指令 (Wjnt)
加减速倍率指令 (ACC)
跳过指令 (Skip,LBL[i])
位置补偿指令 (Offset)
直接位置补偿指令 (Offset,PR[i])
工具补偿指令 (Tool_Offset)
工具补偿指令 (Tool_Offset,PR[i])
增量指令 (INC)
附加轴速度指令(同步) (EV i%)
附加轴速度指令(非同步) (Ind.EV i%)
路径指令 (PTH)
预先执行指令 (TIME BEFORE/TIME AFTER)
中断指令 (BREAK)
注释:
1.对于圆弧动作指令的中间点,只能示教一个动作附加指令,希望使用2个以上的动作附加指令时,以多根较短的直线近似圆弧动作进行示教。
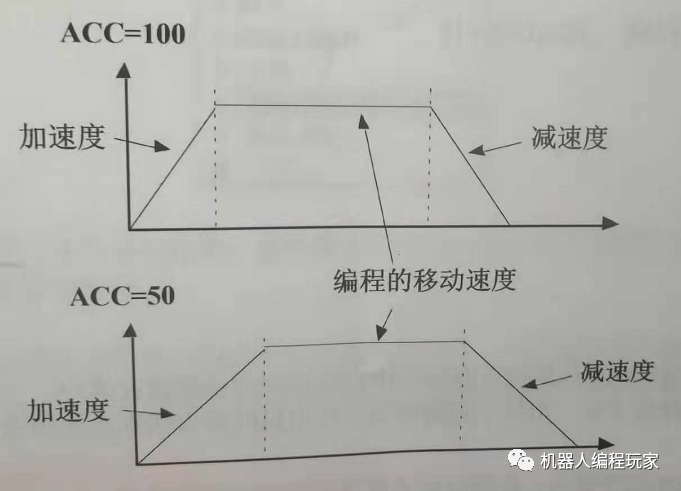
2.加减速倍率指令(ACC)
1~150%,加减速倍率被编程在目标位置。
功能:可以使得机器人从开始位置到目标位置的移动时间缩短或者延长。
危险动作舀热水等动作,使用不超100%的值。需要缩短节拍时间时,使用比100%大的值。
有时会引起不灵活的动作或者震动。出现伺服放大器的电压下降等报警,此时请调低倍率值,或者删除该指令。
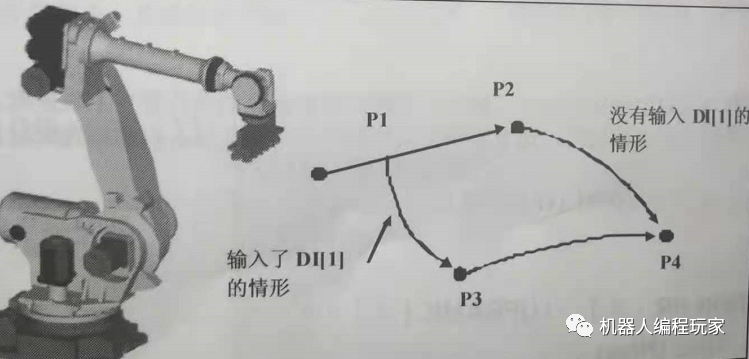
3. 跳过指令
机器人向目标位置移动过程中,跳过条件满足时,机器人在中途取消动作,程序执行下一行的程序语句。跳过条件尚未满足的情况下,在结束机器人的动作后,跳到目的地标签行。
例句:
1:SKIP CONDITION DI[1]=ON
2:JP [1] 100% FINE
3:LP[2] 1000mm/sec FINE Skip,LBL[1]
4:JP [3]50% FINE
5:LBL[1]
6:JP [4] 50% FINE
4.位置补偿指令
如下三要素:
1. 位置寄存器指定偏移的方向和偏移量
2. 位置资料为关节坐标值的情况下,使用关节的偏移量
3. 位置资料为直角坐标值的情况下,指定作为基准的用户坐标系(UFRAME)
注意:
以关节形式示教的情况下,即使变更用户坐标系也不会对位置变量,位置寄存器产生影响,但是以直角形式示教的情况下,位置变量,位置寄存器都会受到用户坐标系的影响!
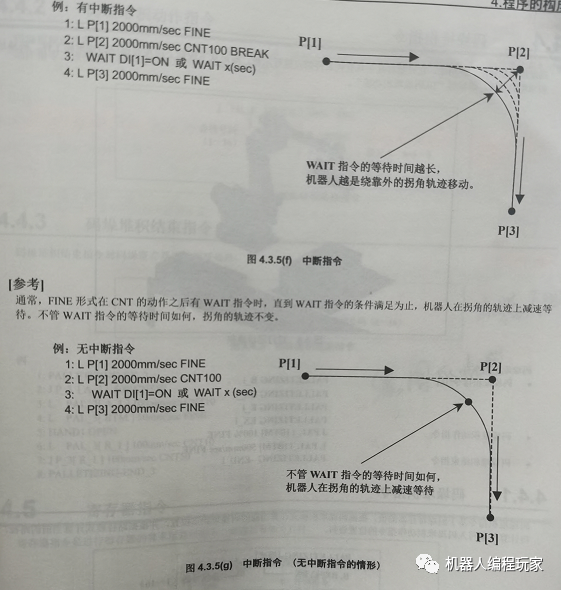
5.中断指令
L P[1]2000mm/sec CNT100 BREAK
通过使用中断指令,紧靠WAIT指令前的动作即使是CNT,也可以是机器人在示教位置等待。(BREAK)
紧靠WAIT指令前的动作中附加有中断指令时,下一个动作不会开始,直到WAIT指令的条件满足为止。因此在WAIT指令的条件满足之前,机器人向着示教点动作。拐角的轨迹随WAIT指令的等待时间而变化。
专注工业机器人
顺势而为干十年