
偏振成像的基本原理和特点
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
通过空间校正,线扫描偏振相机可以探测到双折射、应力、表面粗糙度以及常规成像无法检测到的物理特性。
光有三个基本特性:强度、波长和偏振.今天几乎所有的相机都是为单色或彩色成像而设计的。单色相机用于测量在像素级宽带光谱上的光强,而彩色或多光谱相机则用于检测红、绿、蓝和近红外波段的光强。同样,偏振照相机用于在多偏振状态下捕捉光的强度。
根据 AIA公司最近的一项市场调查,机器视觉全球市场在2015年达到7.6亿美元,其中80%来自单色相机,20%来自彩色相机。虽然偏振片是机器视觉中常用的一种,但到目前为止还没有线扫描偏振相机用于捕捉多偏振状态的图像。
偏振提供了许多好处,它不仅检测几何和表面,而且测量无法用常规成像检测的物理性质。在机器视觉中,它可以用来增强难以区分的物体的对比度。与相位检测技术相结合,偏振成像的成像灵敏感比传统成像方法高得多。
就像人类的眼睛一样,硅不能决定光的偏振。因此,在图像传感器前面需要一个偏振滤波器。图像传感器用滤波器定义的偏振状态来检测光的强度。
大多数常见的偏振滤波器可分为三种类型:时间分割、振幅分割或焦平面分割(表1)。在时间分割的偏振测量中,随着偏振元件(如液晶、偏振片或光弹性调制器)的旋转或调制,数据是按时间顺序获得的,其速度受到调制器的限制。在今天的许多应用中,通常需要100 kHz左右的高线速;时间分割滤波器有其固有的局限性,而且由于设计复杂,成本也很高。
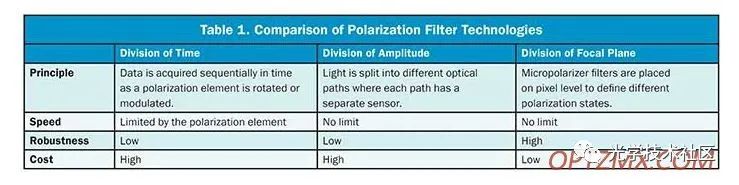
对于振幅分割的滤波器而言,光被分成不同的光路,其中每个光路都有一个独立的传感器。棱镜是最常用的部件,但是通常很难实现很高的装配精度,而且,通常还需要较大的空间用来安装棱镜。
对于焦平面分割滤光器,在焦平面上放置一个微偏振片阵列来定义不同的偏振态。该技术适用于紧凑、稳定、低成本的设计.然而,对于区域扫描成像仪来说,由于每个像素只提供一个自然偏振状态的数据,因此在空间分辨率上存在固有的缺点。这种算法被用来对其他算法进行插值。
一个可用的偏振相机(图1)包含一个具有四线架构的CMOS传感器。由纳米线组成的微偏振器阵列被放置在硅上,纳米线的螺距为140 nm,宽度为70 nm,而在前三个线性阵列上,偏振滤光片的取向分别为0°、135°和90°。过滤光的强度由底层的阵列记录。第四个通道是一个未经滤波的阵列,它捕获的总强度相当于一幅传统图像,而有源阵列之间的间隙减少了空间串扰。
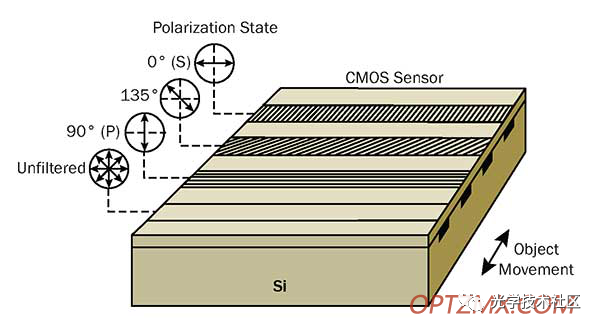
图1.偏振相机原理图是传感器结构。将纳米线微偏振器滤光片置于硅(Si)上,在前三个线阵上分别定义0°(S)、135°和90°(P)偏振态。第四个数组是一个未经过滤的通道,它记录传统的未经过滤的图像。由Teledyne Dalsa提供。
光是电磁波。它的电场、磁场和传播方向是正交的。偏振方向被定义为电场方向。电场方向垂直于纳米线振荡方向的光将会穿过滤光片,而平行于纳米线振荡方向的光将会被滤除。当线扫描相机用反射结构与腹板成一定角度安装时,0°通道传输s偏振光(偏振方向垂直于入射平面),而90°通道传输p偏振光(偏振方向平行于入射平面)。假设相机的输出i0,i90,i135,和iUF分别从0°、90°、135°偏振和未滤波通道输出,则s偏振态和p偏振态的强度分别为:
使用微偏振器滤镜的线扫描和面扫描之间的关键区别是每个像素的原始偏振状态数据的数量。区域扫描成像仪通常使用以所谓的超像素格式排列的0°,45°,90°和135°偏振滤光片,其中每个像素捕获一个原始偏振态。然后使用插值算法根据来自相邻像素的信息计算另外三个状态。由于空间分辨率的损失,导致数据精度不高。另一方面,对于线扫描相机,每个偏振态都有100%的采样。物理测量了多个自然偏振态数据。纳米线微偏振器滤光片的对比度如图2所示。
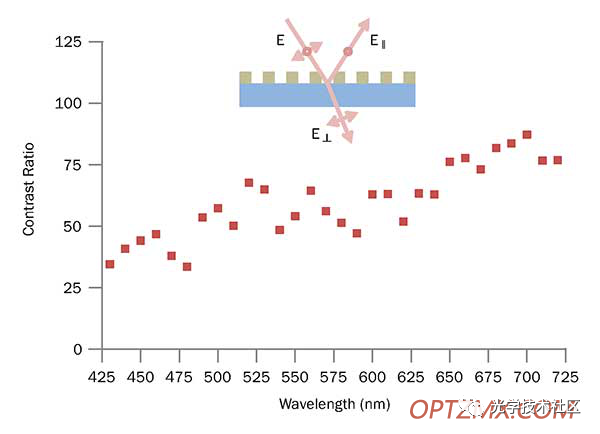
图2.纳米线微偏振器滤光片的对比度。由Teledyne Dalsa提供。
根据波长的不同,对比度在30~90之间。在未来的设计中可以实现更高的对比度。
Stokes参数,S0,S1,S2等通常被用来分析材料的物理性质。差分 偏振、线性偏振度(DoLP)和偏振角(AOP)都是有用的参数。
偏振图像与基于强度的传统图像基本不相关。在视觉系统中,可以在每个特定的偏振状态或其组合中实现数据处理。考虑到人类无法看到偏振图像,所以这是很有用的。彩色编码的偏振图像可能是最受欢迎的一种,因为它们不仅可以提供视觉感知,而且可以在彩色成像中利用标准的数据结构和传输协议。
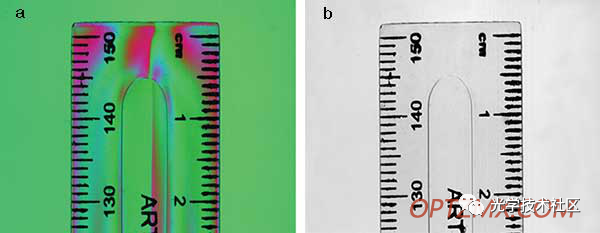
图3.彩色编码偏振图像(a)与传统的未经滤波的图像(b)用偏振相机捕捉到的塑料尺。在偏振图像中,RGB分别代表0°(S)、90°(P)和135°偏振态。由Teledyne Dalsa提供。
图3显示了由偏振相机捕获的塑料标尺的彩色编码偏振图像,其中RGB分别代表0°(s-偏振)、90°(p-偏振)和135°偏振状态。还比较了由未滤波信道捕获的常规图像。显然,偏振成像显示的是塑料尺内部积累的应力,这是常规成像无法检测到的。
随着检测要求的线速达到100 kHz左右和物体分辨率缩小到亚微米,机器视觉行业在可检测性方面面临着许多挑战。不同的技术被陆续开发,如时间延迟积分,以提高信噪比,以及彩色和多光谱成像,以获得光谱特性。然而,基于材料物理特性的检测,则需要更高的对比度。偏振在这里起着关键的作用,因为它对表面或界面上的任何变化都非常敏感。由于相位检测技术,基于偏振的成像比基于强度的成像更加灵敏。
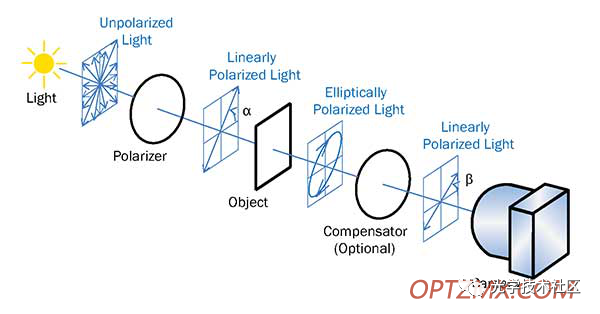
图4.透射结构:偏振器将光源转换成线偏振光。当线偏振光通过物体时,由于双折射,通常会变成椭圆偏振。可以使用可选的补偿器,例如λ/4板。最后由偏振相机拍摄图像。由Teledyne Dalsa提供。
透射结构(图4)通常用于透明材料,如玻璃和薄膜。通常偏振器被用来将光源转换成线偏振光。当线偏振光穿过物体时,由于物体的双折射,通常会发生椭圆偏振。可选补偿器(如λ/4板)也可用于光路中。最后由偏振相机拍摄图像。偏振器和补偿器的角度可以调整,以达到最佳的性能。反射结构(图5)用于不透明材料。来自半导体和金属等许多材料的反射光与偏振有关。
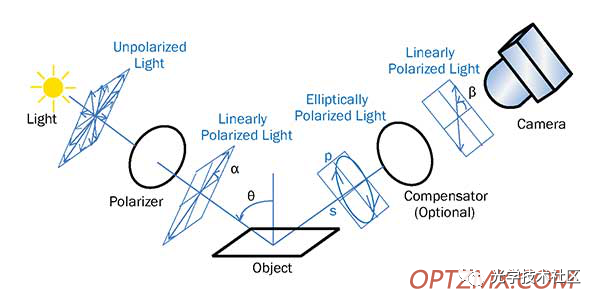
图5.反射结构:偏振器将光源转换成线偏振光。当线性偏振光从物体反射出来时,反射光一般会变成椭圆偏振光。旋转偏振片和补偿器的角度,以获得最佳的性能。由Teledyne Dalsa提供。
偏振器将光源转换为线偏振光。当线性偏振光从物体反射出来时,反射光一般会变成椭圆偏振光。通过旋转偏振片和补偿器的角度,可以获得到达摄像机的线偏振光。它的结构类似于椭圆仪。不同的是,相机不是使用旋转分析仪,而是同时捕获不同的偏振态,具有横向空间分辨率。光是线状光源,而不是点光源。
例如,在任何一种结构中,当对象的物理属性因缺陷而发生变化时,该变化改变的偏振状态与对象的其他状态不同。然后由高灵敏度的偏振相机检测这一变化。
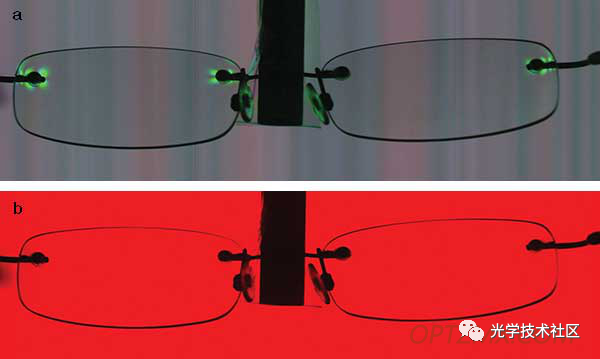
图6.偏振像(a)与传统的未经滤波的图像(b)一副眼镜。螺钉周围的应力出现在偏振图像中,而在常规图像中看不到。
机械力导致双折射,这会改变透射光的偏振状态,就像在一副玻璃上引起应力的螺钉中所看到的那样(图6)。从未经过滤的通道中可以看到,常规成像无法检测到这种应力。
注意表面上有划痕的电子线路图像(图7)。在偏振图像中,由于对比度增强,表面缺陷更加明显。
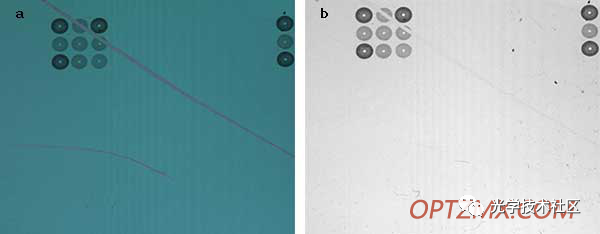
图7.偏振像(a)与传统的未经滤波的图像(b)印刷电路的。使用偏振成像的对比度增强显示了表面的小划痕,这是常规成像无法检测到的。由Teledyne Dalsa提供。
线扫描偏振成像结合了椭圆偏振仪的强大功能和真正的横向分辨率。椭圆偏振技术是20世纪70年代发展起来的一种非常灵敏的光学技术,其垂直分辨率仅为纳米的几分之一。它被广泛应用于测定材料的物理性质,如薄膜厚度、材料组成、表面形貌、光学常数、甚至晶体无序性。后来发展起来的成像椭圆仪增加了一定程度的横向分辨率。然而,由于使用的是点光源,它的视场很小(微米-毫米),因此只适用于显微镜。采用线性传感器和线性光源的线扫描偏振成像克服了这一限制。
椭圆仪的入射角一般选择接近布鲁斯特角,
其中n是物体的折射率,与波长有关。对于玻璃,n≈1.52和θB≈56°,硅,n≈3.44和θB≈74°,波长为633 nm。
在布鲁斯特角处,p偏振光的反射最小,s-偏振态和p-偏振态反射率的差异最大,这给出了最高的灵敏度。当非偏振光在布鲁斯特角下入射,相机安装在镜面角度时,p通道捕获暗信号,而s通道仍然从反射中捕获正常信号。如果完全的p偏振光是在布鲁斯特角下入射的,安装在同一角度上的照相机会捕捉到一个黑暗的背景。表面上任何因缺陷或杂质等而产生的偏差,都会导致区域明亮。然后可以获得高对比度的图像。但是行扫描的一个挑战是,当视场比传感器的长度大得多时,就无法满足这种情况了。
总之,线扫描偏振成像结合了高灵敏度的偏振相位检测和真正的横向分辨率,为下一代视觉系统提供了在许多需要的应用中的可检测性。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~