
使用 Python 的基于边缘和基于区域的分割
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达


在这篇文章中,我将重点介绍基于边缘和基于区域的分割技术,在进入细节之前,我们需要了解什么是分割以及它是如何工作的。
图像分割是一种将数字图像分割成各种图像对象的技术。
一个区域(图像对象)中的每个像素在某些属性上是相似的,例如颜色、强度、位置或纹理,这可以降低图像的复杂性,以便于分析。在分割的帮助下,还可以从图像中检测出隐藏信息。
分割算法处理图像的两个基本属性:
强度值,例如不连续性(边界法)
相似性(区域法)
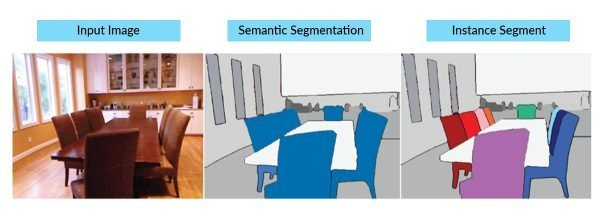
在下图中,我们看到了一张以椅子、桌子、窗户等为特征的图像。我们可以通过分割来分别获取这些对象。中间的图像有一把椅子、一张桌子和窗户作为我们的分割图像对象。在最右边的图像中,通过标记图像对象来使用实例分割。
在使用 Python 进行机器学习之后,分割变得非常容易。
将图像划分为不同的图像对象,从中获取信息,然后使用标签来训练各种 ML 模型以解决业务问题,其中一个例子是一个面部识别系统,该系统通过分割自动标记出勤情况。
分割的另一个应用是在医学领域中,在检测到肿瘤、癌症等严重疾病后进行高效和快速的诊断,以及查看由射线照相、MRI、热成像、内窥镜检查、细胞和组织的超声检查生成的医学图像中的模式。图像分割在机器人等领域也有巨大的应用。
图像分类是一种流行的分割应用,算法只能从图像中捕获所需的成分。在 Python 中实现图像分割很容易,以获得快速的结果。
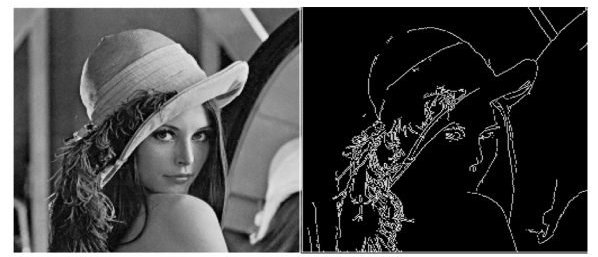
在这种方法中,区域的边界彼此之间以及与背景之间的差异很大,允许基于强度(灰度级)的局部不连续性进行边界检测。
换句话说,它是在图像中定位边缘的过程。这是理解图像特征的非常重要的一步,因为我们知道边缘由有意义的特征组成并且具有重要的信息。
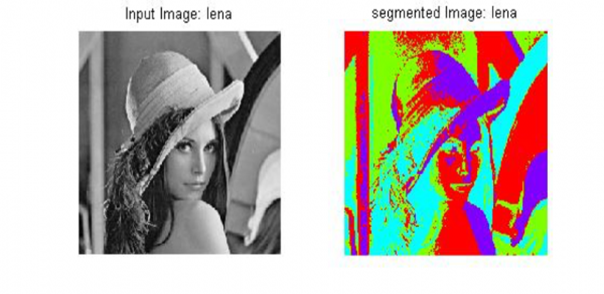
这种方法包括根据一组特定的标准将图像划分为相似的区域。
基于区域的分割技术涉及一种算法,该算法通过将图像划分为具有相似像素特征的各种组件来进行分割,该技术在输入图像中搜索小块或大块以进行分割。
它将向选定的块添加更多像素,或者将块点进一步缩小为更小的段,并将它们与其他更小的块点合并。因此,基于该方法还有两种更基本的技术:区域生长和区域合并与分割。
重大疾病检测
人脸识别系统
自动驾驶汽车
机器人学
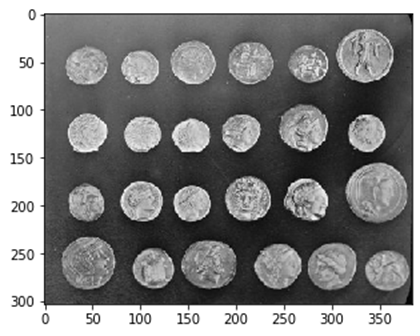
import numpy as npimport matplotlib.pyplot as pltfrom skimage import datacoins = data.coins()hist = np.histogram(coins, bins=np.arange(0, 256))fig, (ax1) = plt.subplots()ax1.imshow(coins, cmap=plt.cm.gray,interpolation='nearest')
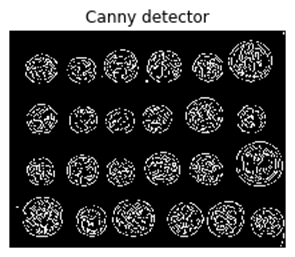
from skimage.feature import cannyedges = canny(coins/255.)fig, ax = plt.subplots(figsize=(4, 3))ax.imshow(edges, cmap=plt.cm.gray, interpolation='nearest')ax.axis('off')ax.set_title('Canny detector')Text(0.5, 1.0, 'Canny detector')
在这段代码中,我们使用了 canny 库,这是一种流行的边缘检测算法来检测输入图像的边缘。
通过设置有效对象的最小大小,可以轻松去除小的虚假对象:
from scipy import ndimage as ndifill_coins = ndi.binary_fill_holes(edges)fig, ax = plt.subplots(figsize=(4, 3))ax.imshow(fill_coins, cmap=plt.cm.gray, interpolation='nearest')ax.axis('off')ax.set_title('Filling the holes')Text(0.5, 1.0, 'Filling the holes')
我们使用ndimage as ndi,这意味着一个n维图像,它是处理图像处理操作的子模块,如输入、输出、裁剪、过滤等。
Ndi.binary_fill_holes用于填充连接到边界的n维二进制阵列孔和侵入孔。
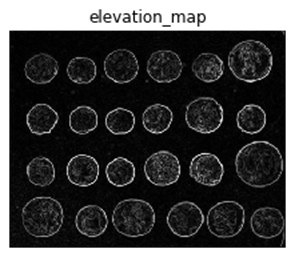
from skimage.filters import sobelelevation_map = sobel(coins)fig, ax = plt.subplots(figsize=(4, 3))ax.imshow(elevation_map, cmap=plt.cm.gray, interpolation='nearest')ax.axis('off')ax.set_title('elevation_map')Text(0.5, 1.0, 'elevation_map')
在这里,我们从skimage.filters导入sobel模块,该模块用于查找输入图像中的边缘。
Sobel transform 还可以帮助我们找到输入图像中的垂直和水平边缘。
这篇文章用 Python 实现详细解释了分割及其两种重要技术(基于边缘的分割和基于区域的分割)。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~