
3D视觉传感技术:时间飞行法 (ToF) 技术分析
点击左上方蓝字关注我们
转载自丨新机器视觉

具体内容概要
一、3D视觉方案技术介绍
双目立体视觉法
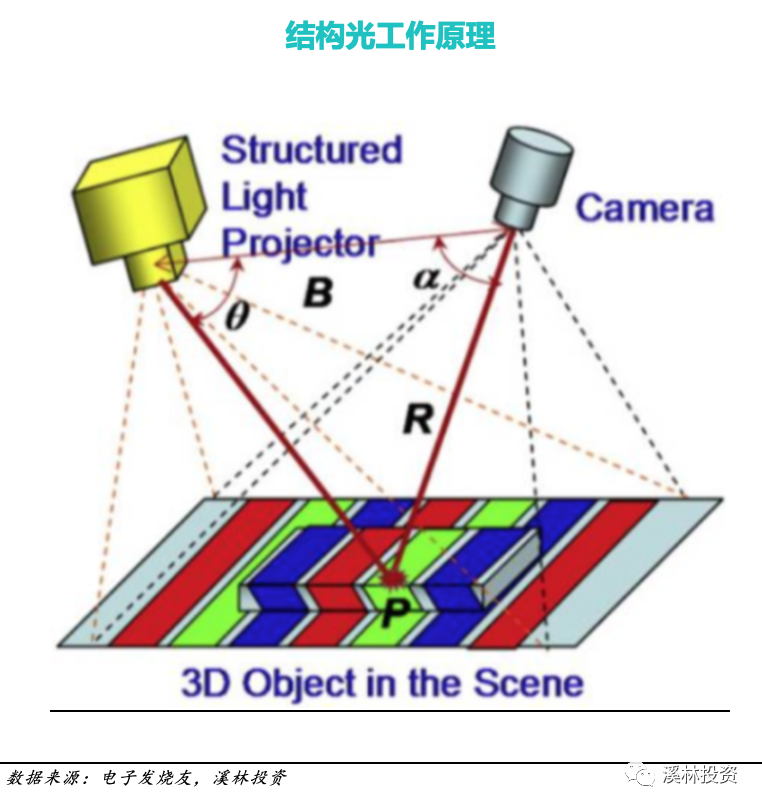
结构光法
二、时间飞行法(ToF)
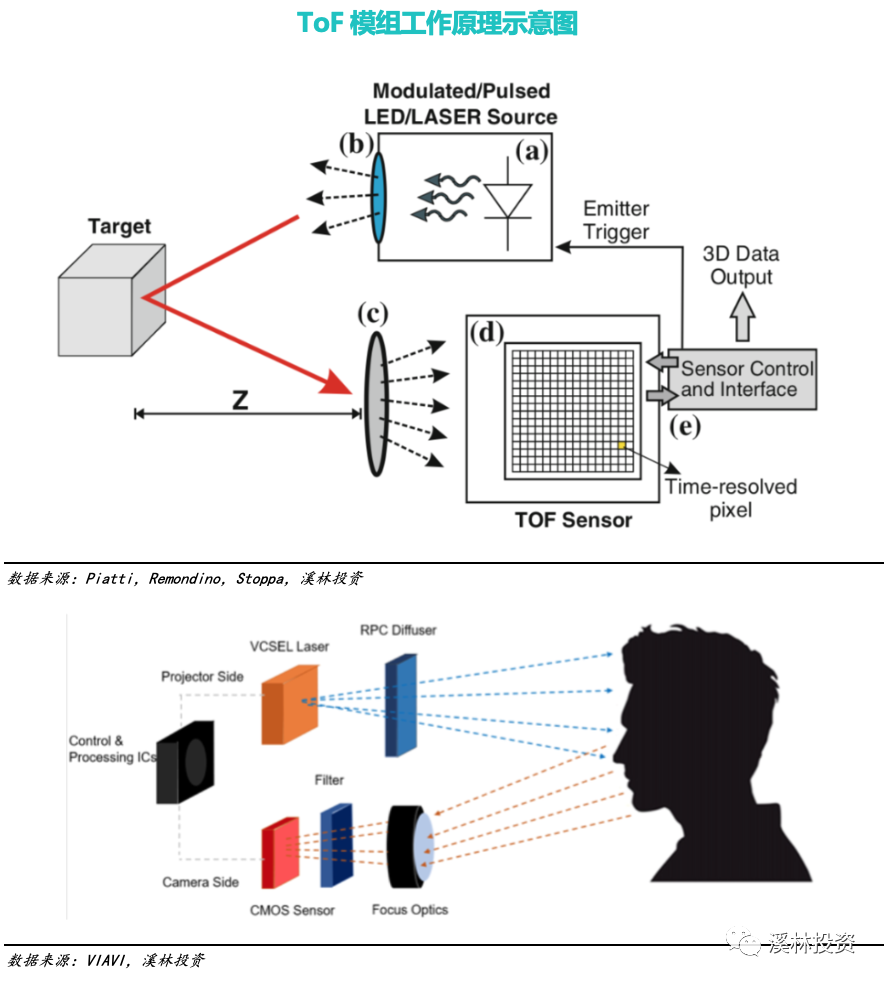
ToF原理介绍
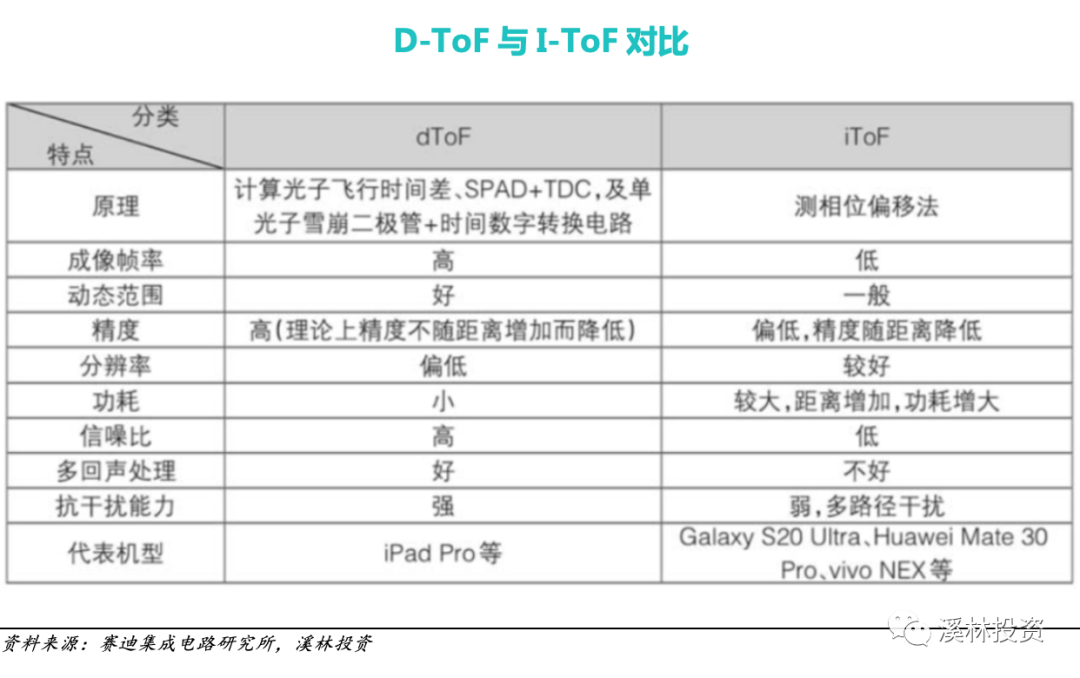
飞行测量技术(D-ToF)
飞行测量技术(I-ToF)
ToF产业链介绍
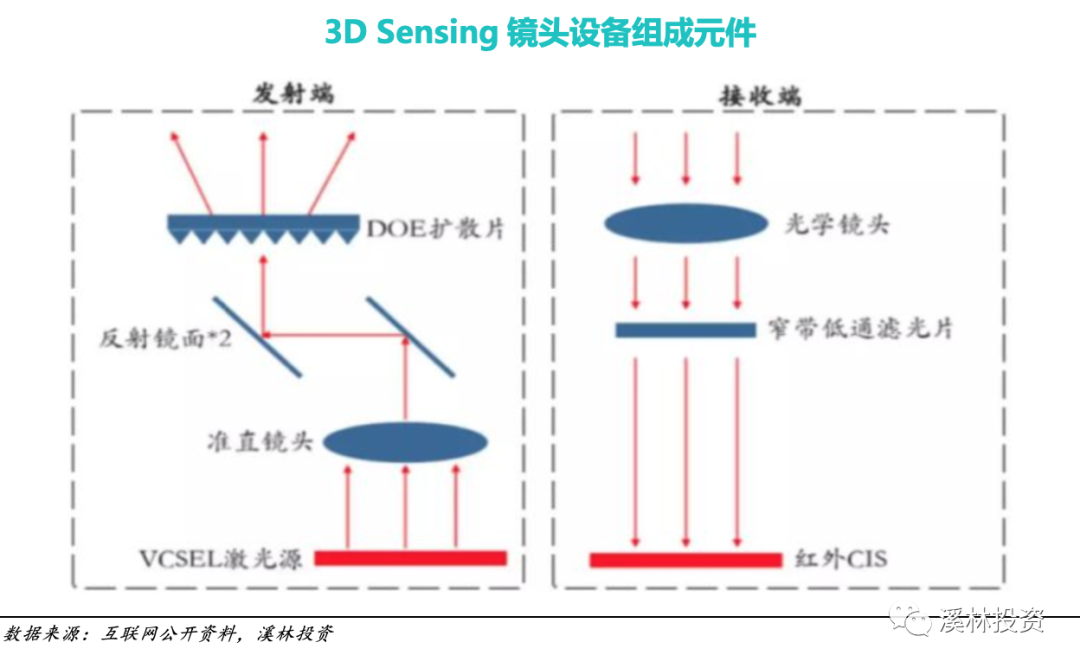
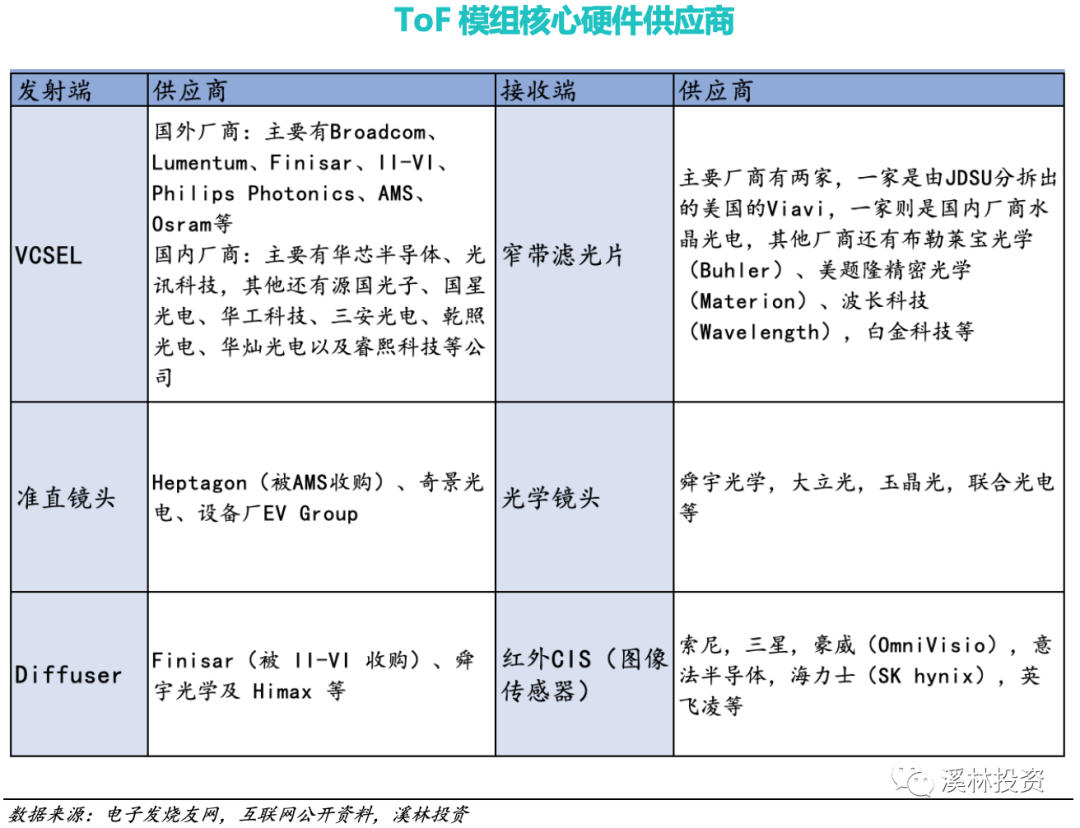
ToF镜头模组组成核心硬件:
发射端:
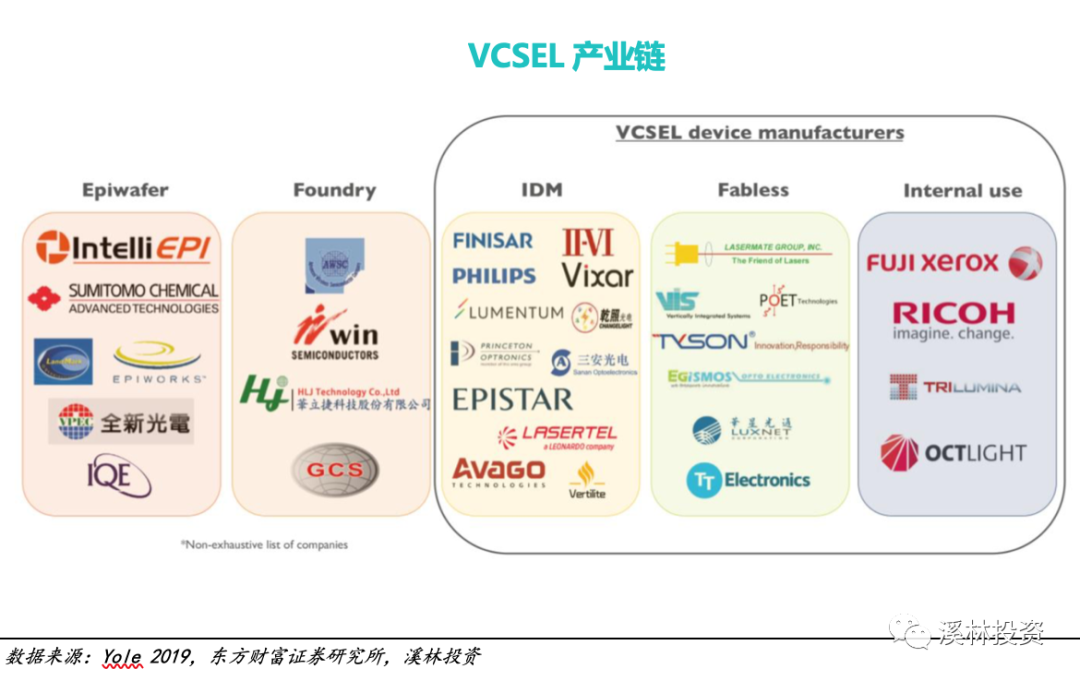
(1)发光单元
(2)准直镜头
(3)DOE扩散片(Diffuser)
接收端:
(1)窄带滤光片和光学镜头
(2)红外CIS(图像传感器)
三、ToF技术应用场景
手机
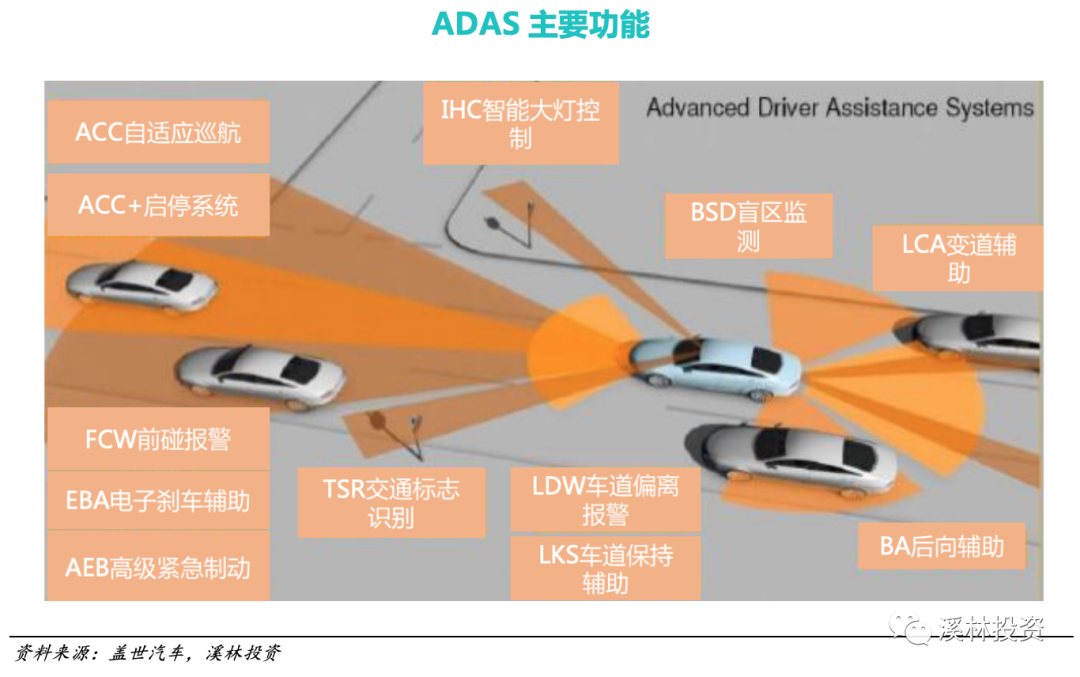
汽车
人脸识别/安保系统
工业领域/物流
四、ToF市场前景
3D视觉方案技术介绍
3D视觉传感技术是一项重要的科学突破。它是一种深度传感技术,增强了摄像机进行面部和目标识别的能力。相对于2D技术,3D技术除了显示对象的X和Y值之外,还可以提供记录场景或对象的深度值,在感知和处理日常活动的方式上带来了独特的进步,制造商争先恐后地将这些新的进步融入到手机等消费产品中。该技术利用光学技术模拟人类视觉系统,促进了增强现实、人工智能和物联网的出现和应用。
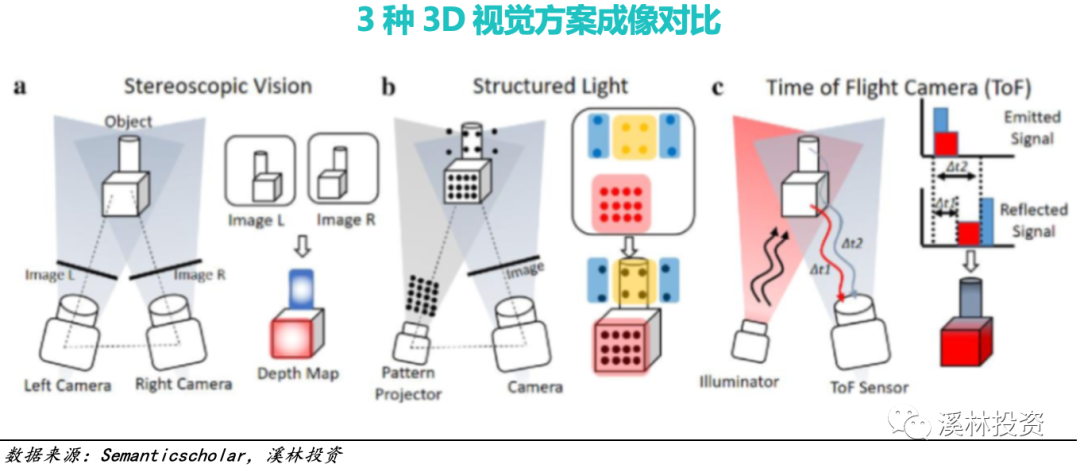
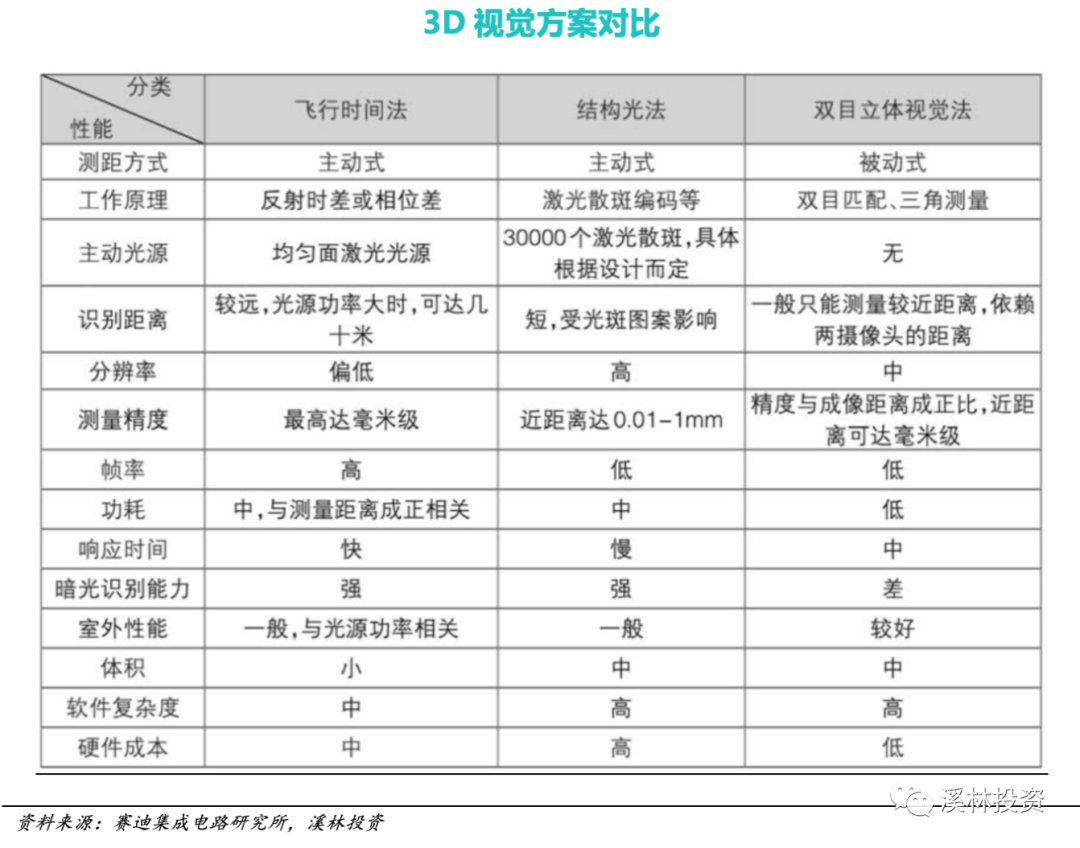
目前市面上主流的3D光学视觉方案有三种:双目立体视觉法(Stereo Vision,在下文称双目法),结构光法(Structured Light,在下文称结构光)以及飞行时间法(Time of Flight, ToF在下文称ToF)。此文主要探讨的是ToF,同时会对其他两种主流方案进行技术比较。目前较为成熟的方案是结构光和ToF。其中结构光最为成熟,已经在工业3D视觉中大规模应用。ToF的概念是扎根于深度传感器的。这里的深度传感器是指采用像素阵列来获取整个场景的高分辨率深度分布。对于深度传感器来说,一般用于测量深度的方案分别有结构光、双目和ToF三种,其中结构光(iPhone目前的Face ID就是使用了基于结构光的深度传感器)和双目技术都是基于几何原理做间接深度估计,而ToF则是测量发射光和反射光之间的飞行时间并根据光速来直接估计深度。
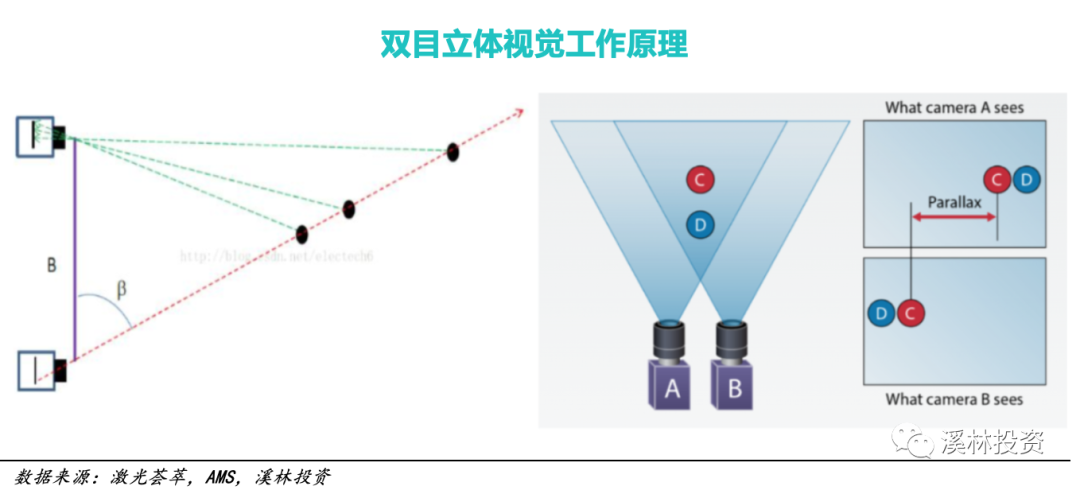
1、双目立体视觉法(Stereo Vision)
飞行时间法介绍
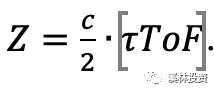 其中
其中 表示光在空气中传播的速度。D-ToF通常用于单点测距系统,但由于像素级亚纳秒电子秒表的实现困难,D-ToF的成本以及技术难度相较于I-ToF更高。这项技术特别适用于基于SPAD的ToF系统。目前主流的主流的ToF技术所采用的SPAD(single- photon avalanche diode,单光子雪崩二极管)是一种高灵敏度的半导体光电检测器,其被广泛运用于弱光信号检测领域。结合D-ToF技术,可用来精确检测记录光子的时间和空间信息,继而通过三维重极算法进行场景的三维重构。苹果在2020年发布的第四代iPad Pro中就运用到了D-ToF技术。D-ToF的原理看起来虽然很简单,但是实际能达到较高的精度很困难而且成本对比I-ToF要高很多。除了对时钟同步有非常高的精度要求以外,还对脉冲信号的精度有很高的要求。普通的光电二极管难以满足这样的需求。而D-ToF中的核心组件SPAD由于制作工艺复杂,能胜任生产任务的厂家并不多,并且集成困难。所以目前研究D-ToF的厂家并不多,更多的是在研究和推动I-ToF。
表示光在空气中传播的速度。D-ToF通常用于单点测距系统,但由于像素级亚纳秒电子秒表的实现困难,D-ToF的成本以及技术难度相较于I-ToF更高。这项技术特别适用于基于SPAD的ToF系统。目前主流的主流的ToF技术所采用的SPAD(single- photon avalanche diode,单光子雪崩二极管)是一种高灵敏度的半导体光电检测器,其被广泛运用于弱光信号检测领域。结合D-ToF技术,可用来精确检测记录光子的时间和空间信息,继而通过三维重极算法进行场景的三维重构。苹果在2020年发布的第四代iPad Pro中就运用到了D-ToF技术。D-ToF的原理看起来虽然很简单,但是实际能达到较高的精度很困难而且成本对比I-ToF要高很多。除了对时钟同步有非常高的精度要求以外,还对脉冲信号的精度有很高的要求。普通的光电二极管难以满足这样的需求。而D-ToF中的核心组件SPAD由于制作工艺复杂,能胜任生产任务的厂家并不多,并且集成困难。所以目前研究D-ToF的厂家并不多,更多的是在研究和推动I-ToF。

TOF技术应用场景
ToF技术应用场景
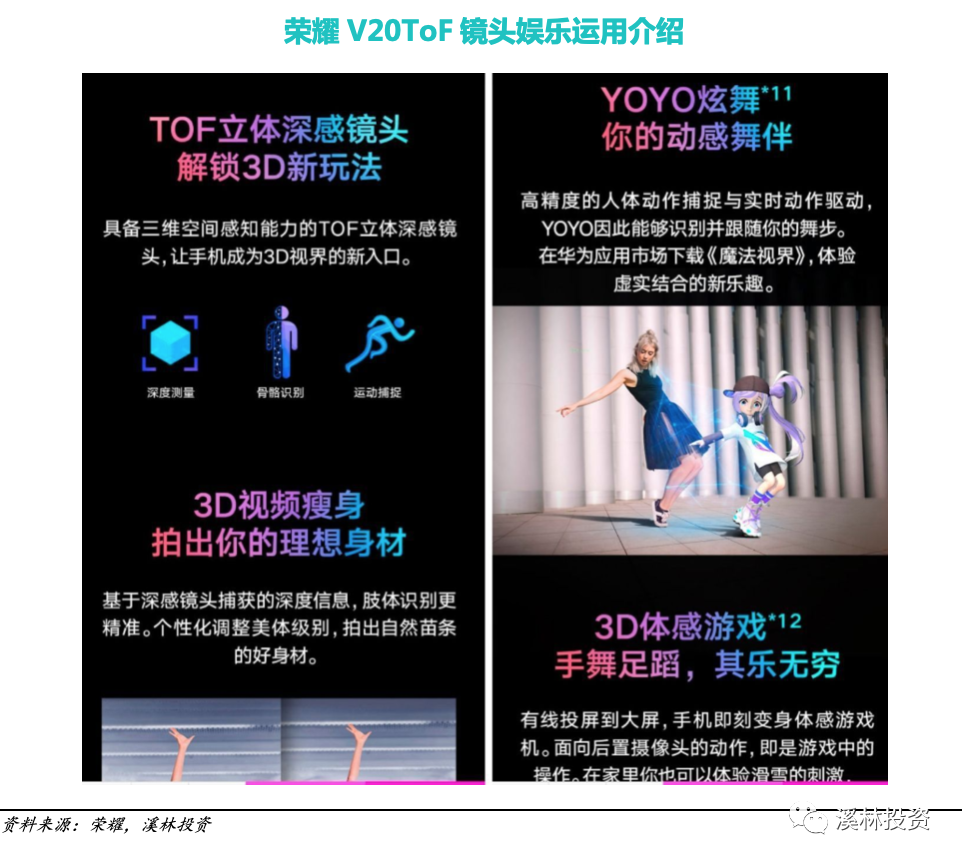
ToF技术具有丰富的应用场景,在手机、汽车、工业、人脸识别、物流、安抚监控、健康,游戏、娱乐、电影特效、3D打印和机器人等诸多领域都有应用。以下将举例ToF在不同领域中的实际应用。





TOF市场前景
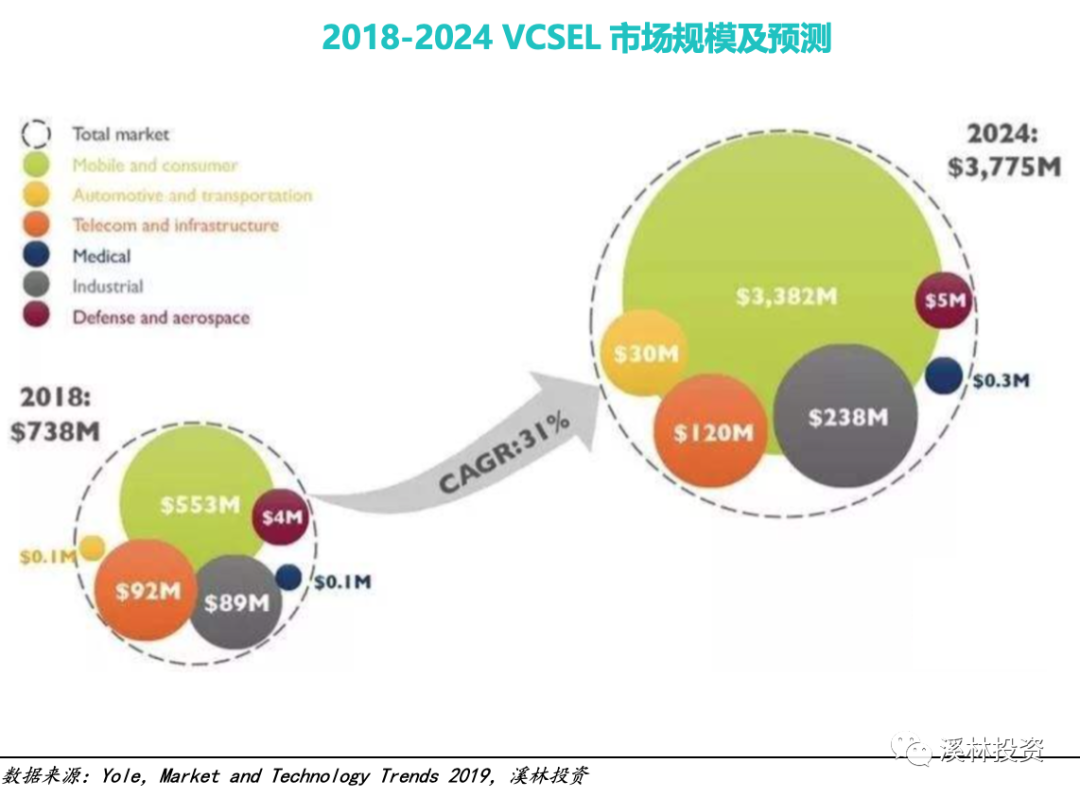
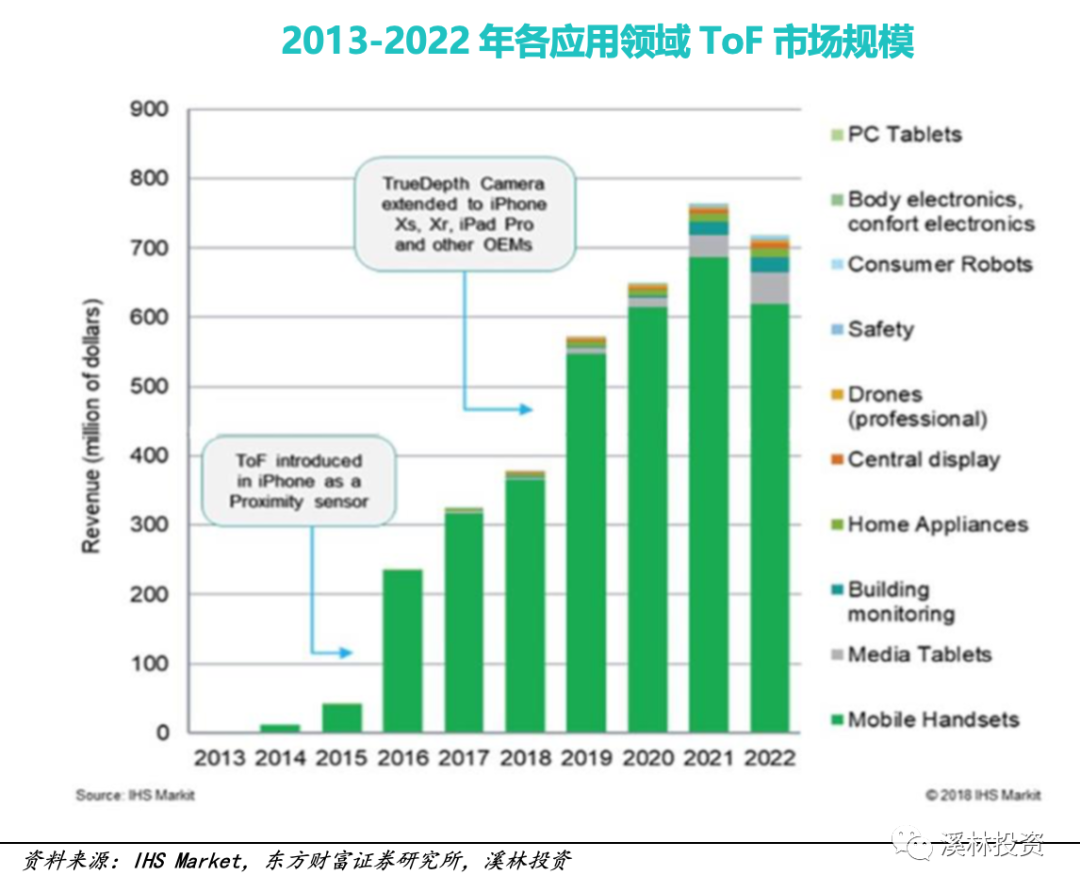
根据Yole数据,2019年全球3D成像和传感市场规模为50.48亿美元,其中,移动&消费应用占比40%,是最大的应用领域,工业、国防&航空航天和汽车应用占比分别为21%、17%、17%;Yole预测2025年全球3D成像和传感市场规模达150.79亿美元,2019-2025年CAGR超过20%,移动&消费应用继续为最大的应用领域,2025年市场规模为81.65亿美元,占比为54%,汽车应用上升为第二大应用领域,2025年市场规模为36.73亿美元,占比为24%。其中ToF传感器未来几年在终端将迎来高速增长。据IHS Markit报告,2018年全球ToF sensor传感器市场规模为 3.7亿美元,占整个3D感测市场的33%,2019年其市场规模同比增长 35%,市场份额达到5亿美金,占比提高至40%左右。基于ToF方案的多方面优势,尤其是成本优势,预计 2022 年,TOF sensor市场规模有望达到7亿美金。这一市场的增长主要是由汽车行业对ToF传感器的需求不断增加、智能手机中3D相机的采用不断增加以及此类智能手机的使用不断增加所推动的。
3D机器视觉系统在各个行业的应用不断增加,工业4.0的部署不断增加,为ToF传感器市场的增长提供了重大机遇。从具体应用领域来看,未来三年ToF主要的应用市场还是来自智能手机市场,预计2020年对应市场规模超过6亿美元,占整个市场的90%以上其次是平板电脑市场、建筑物检测、智能家居、汽车中控、无人机等应用领域。未来ToF技术将不断渗透到中高端甚至中端机型的功能中去。如果中高端机型被普及ToF技术,那么需求体量将会大幅上升。而随着手机每天使用的3D应用程序不断增加,ToF将来的需求量势必会更大。
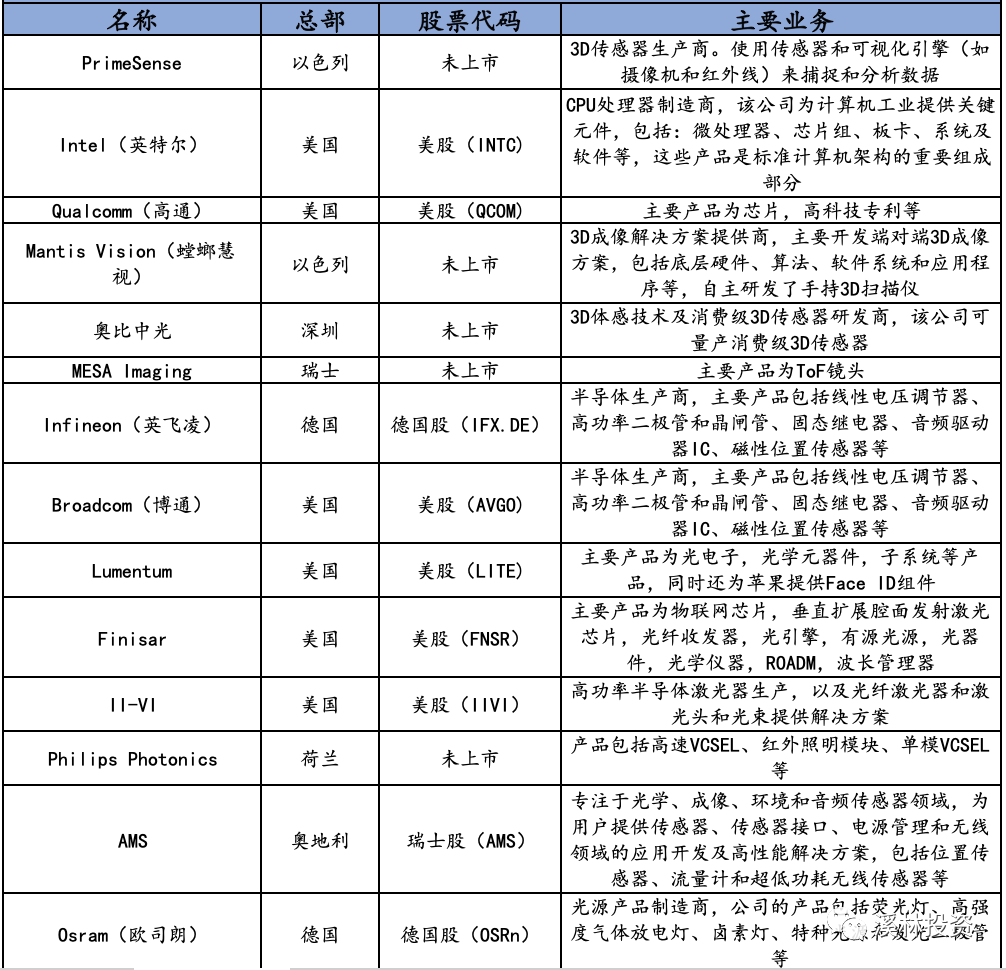
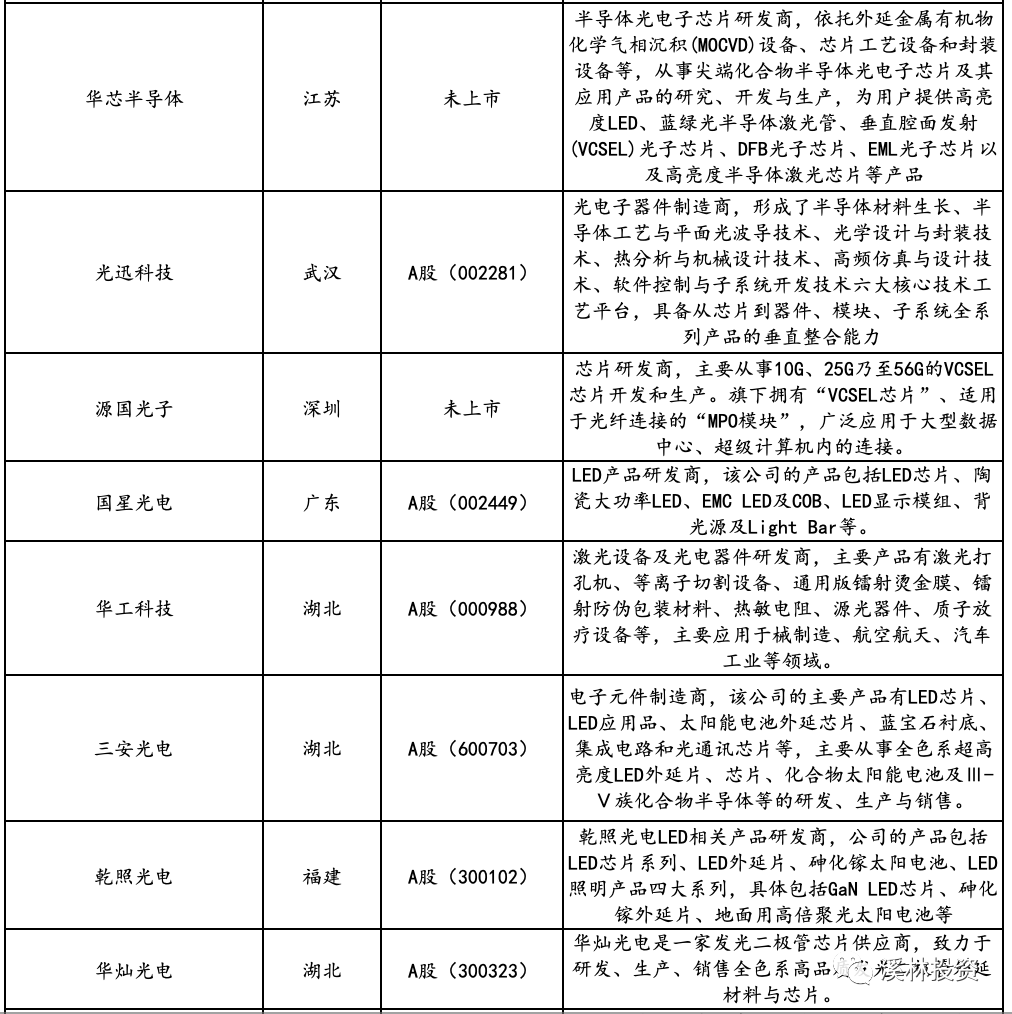
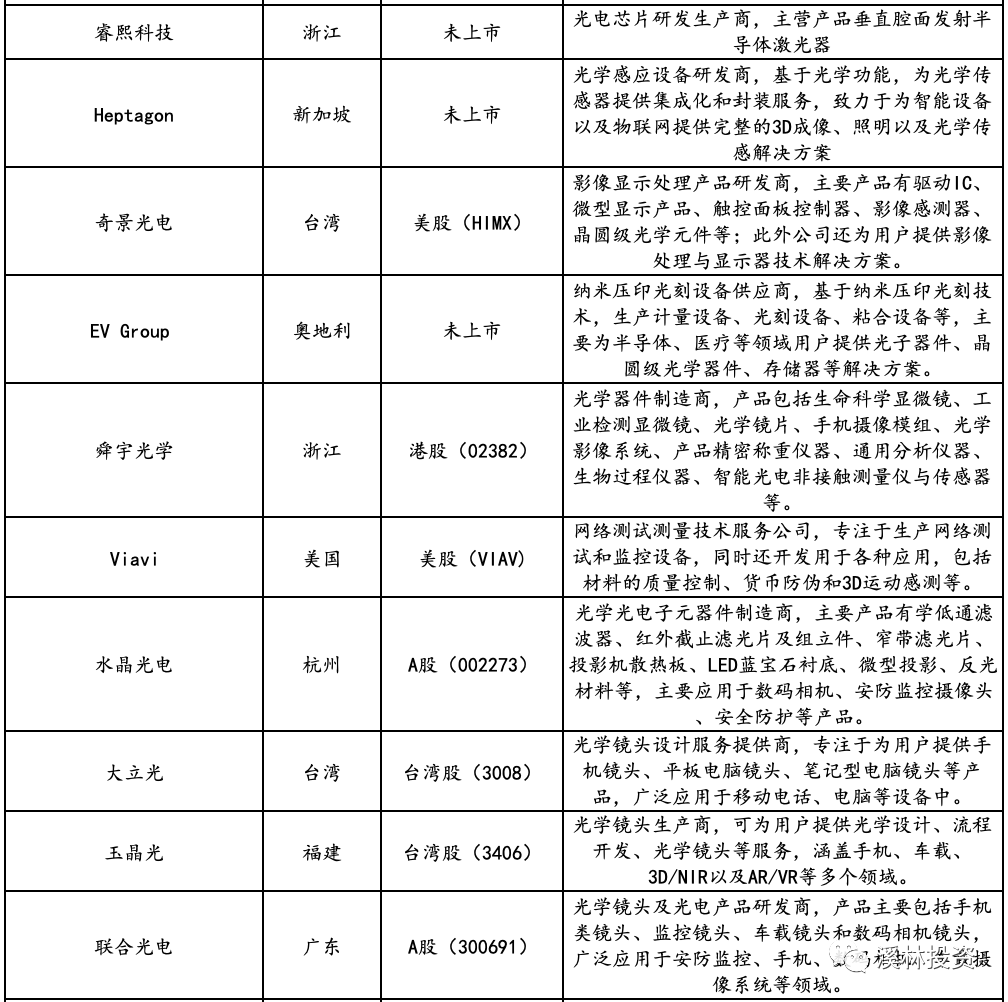
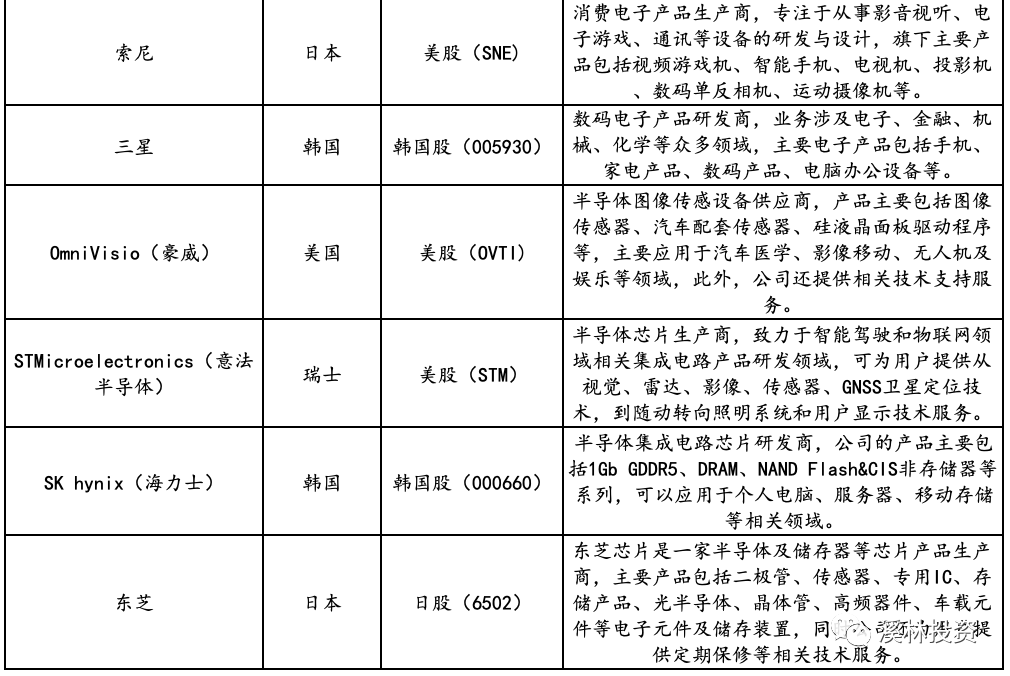
本文涉及公司总目录
资料参考
END
整理不易,点赞三连↓