论文标题:DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED JANUARY, 2020
引言介绍
现代化发展的需要使得各类机器人深入到人类的日常生活之中。当前大多数机器人能在特定的场景中,针对特定的任务执行较为简单的工作。然而,在现实生活机器人应用的环境和条件是会动态变化的,为了使机器人能适应不同的工作环境,机器人应当具备更为敏感精确的感知能力。另一方面,当前机器人仍远未达到如同人类一般的操作水准,甚至就连简单的抓取动作都不能很好的完成,很大程度上在于目前传感器灵敏度的局限性。
力对于人与机器人来说都是一个十分重要的概念。人们能通过对力的感知,来完成与自然界各种事物的互动。越是精细的操作,越是体现了人对力把控的精确性。不同于其他感知类型,人类对于力的感知基本上都是通过皮肤接触。接触是一种十分重要的感知手段,他为人提供了一种最为自然、直接的测力方式。近年来各类科研人员针对触觉感知进行了各类研究,并就如何结合触觉来提升机器人控制领域的灵敏性做出了极大努力。虽然现存的触觉传感器种类繁多,但仍存在极大的瓶颈,以至于无法广泛使用。主要需求有以下几点:高分辨率、高灵敏度、稳定且易于使用、价格低廉以及高集成度。
为了更好的满足上述需求,Facebook于2021年11月发布了一款命名为DIGIT的基于视觉的触觉传感器。相比于其他同类传感器,DIGIT具有如下优点:1)体积小巧且模块化,可做到即插即用。2)可大规模制造。3)稳定可靠,寿命长。此外,DIGIT还保留了同类传感器的诸多优点。
传感器结构
DIGIT基本结构如下图所示。从左往右分别为:A)弹性体,B)亚克力窗,C)卡扣支架,D)照明PCB,E)塑料外壳,F)摄像头PCB,G)后外壳。一个完整的DIGIT长为20mm,高为27mm,厚度为10mm,并且大约重20g。DIGIT有一个塑料多体三件式外壳,该外壳易于3D打印生成,也可进行大规模的注塑模具生产。相机和凝胶都可通过按压直接安装在相应外壳上,从而可轻易更换配件。此外,可更换塑料外壳来调配不同的焦距,并且可以用一个螺丝钉来完成弹性体的更换操作。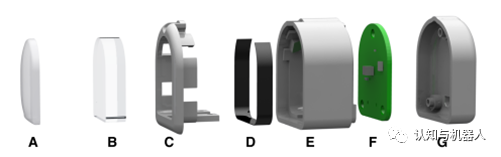
图1 DIGIT基本构成
传感器特点
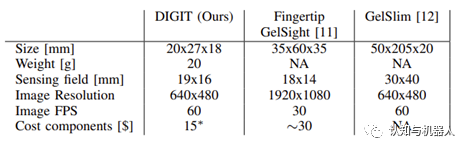
尽管以往基于视觉的触觉传感器在原始触觉感知方面提供了无可比拟的高空间分辨率,然而相比于其他触觉传感器,它们仍有三大主要局限:1)相对笨重庞大的外形体积。2)外表用于接触的软体材料磨损较快,使得传感器寿命不长。3)制作工艺复杂,且很大程度上采用人工方式。这就导致了传感器在各类参数上的不确定性。系统在更换新的传感器时,不得不重新部署各类参数及条件,从而极大的加大了传感器的更换成本。DIGIT在继承了以往同类传感器优点的同时,又巧妙地解决了这三大缺陷。首先,DIGIT在设计上具有充分的物理紧凑性,足以适配任意末端执行器上的抓取关节或是具有多指结构的机械手。其次,DIGIT的凝胶设计得更加稳定耐用,同时比以前的设计更易于替换,从而有效的延长了整个传感器的寿命。最后,该传感器在设计上采用了新的自动化制造技术,并强调使用无工具装配和商业现货组件,从而能够以非常低的成本实现快速、大规模、可重复生产。DIGIT传感器的总制造成本约为15美元。其中印刷电路板为1.5美元,电子元件8美元,塑料2美元,凝胶3美元。在表1中,假设每种传感器以每批次1000件的数目进行生产,本表将DIGIT与其他两款比较流行的同类传感器进行了简单比较,具体信息可见表1。表1 三类传感器的参数比较
性能测试
基于视觉的触觉传感器依赖于接触表面的软体可变形弹性材料,该材料通常会在重复使用时会导致严重的磨损,从而会改变传感器的特性。设计团队开发了一种新得凝胶制造工艺,增加了凝胶的寿命和可靠性,同时可大规模生产并不会影响触觉传感器的性能。对于DIGIT,设计团队从三个方面构造了弹性体。首先使用喷枪将硅基白色颜料添加到模具中,然后使用化学仪器进行固化,以产生具有受控均匀厚度的图像传输层。然后将基层硅酮涂敷在手指状模具上,然后进行固化。随后,将硅树脂从模具中取出,并使用光滑的Sil Poxy(一种光学透明的硅树脂粘合剂)将其粘在亚克力窗上。如上文所述,该丙烯酸凝胶单元可在组装过程中压入对应的外壳部件。对于硅树脂,使用Solaris上的Smooth,这是一种通常用于涂覆光伏电池的硅树脂。较厚的图像传输层变形较小,导致触觉感应输出中的空间分辨率损失。另一方面,薄层更容易损坏。在设计过程中,设计者迭代了图像传输层的厚度,从而权衡了坚固性和灵敏度。图2显示了当接触各种物体时DIGIT的触觉感应输出,显示了其灵敏度。DIGIT的未来迭代可能包括基于力的作用范围来考虑不同厚度的凝胶。

图2 不同物体的测结果图
案例展示
为了进一步展示DIGIT在机械臂控制领域强大的性能,实验人员展示了一项实验案例。实验人员将装配有DIGIT的Allegro机械手安装在Sawyer机械臂上。在每次实验开始时,玻璃球都会被一个金属支架升起,看起来就像一个高尔夫球座。同时该金属支架也会被安装在一个直线电机上,之后机械臂会执行预先编译好的运动程序,并用大拇指和另一个手指作为夹钳夹住弹珠,从而从平台上捡起弹珠。机械臂必须学会利用手指在弹珠表面小心地滚动弹珠,以将其操纵到所需要的位姿。这需要在两个手指不同程度的压力下,对弹珠在小的、弯曲的以及可变形的手指表面上的滑动和滚动进行动态建模,极具挑战性。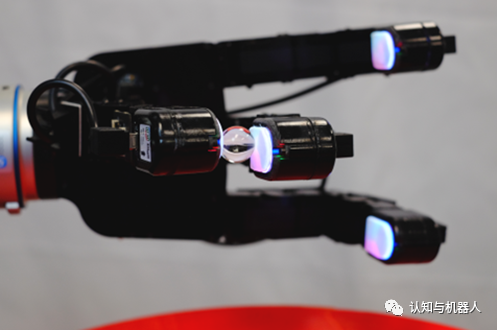
总结
触觉感知是机器人迈向人类级别操作技能的重要组成部分。本文向各位介绍了一种新型且具有紧凑设计的触觉传感器DIGIT。DIGIT提供了丰富且高分辨率的触觉读数。此外,DIGIT还在许多价值指标上带来了重大改进:可靠性、组件可用性、易装配性以及制造成本。本文通过使用DIGIT来解决一项具有挑战性的精细运动控制任务,即用手指对玻璃弹珠进行操纵,来展示DIGIT强大的能力。基于深度模型预测控制技术的提升,设计者尝试利用从原始触觉输入到理想目标位置的转换来完成玻璃弹珠的操纵任务。本文相信,DIGIT是多功能触觉传感器设计的一个进步,可以大规模生产,并在机器人社区中广泛采用,以达到人类水平的操作技能。未来该传感器的改进工作将会着眼于进一步小型化传感器的形状因素,并不断设计出具有弯曲、全方位感应场的传感器。