
ROS 八叉树地图构建 - 给 octomap_server 增加半径滤波器!
共 3558字,需浏览 8分钟
·
2020-08-15 18:26

登龙
这是我的第 147 篇原创
为了在每帧点云中滤除噪声点,选择了半径滤波器,也用高斯滤波器测试过,但是没有半径效果好,这里记录下在 octomap_server 中增加半径滤波器的步骤,并在 launch 中配置滤波器参数。
一、半径滤波器基本原理
放一张汇报用的 PPT 截图:
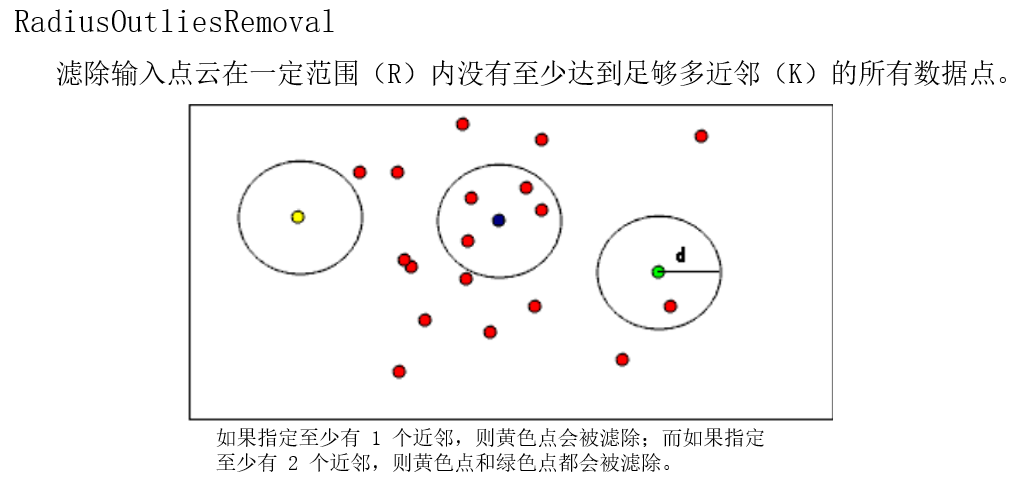
原理很简单就是判断一个点云周围(半径 R)有没有足够多(K)的邻居点,如果没有就删除这个点,否则就保留。
二、基本用法
我一般学习技术喜欢到官网看最原始的教程:Removing outliers using a Conditional or RadiusOutlier removal,这个教程介绍了半径滤波器(我不清楚中文名到底叫什么滤波器)的基本用法:
#include
#include
// 输入待滤波的原始点云指针
pcl::PointCloud
::
Ptr cloud (new pcl::PointCloud
)
;
// 保存滤波后的点云指针
pcl::PointCloud
::
Ptr cloud_filtered (new pcl::PointCloud
)
;
// 创建滤波器对象
pcl::RadiusOutlierRemoval
outrem;
// 设置要滤波的点云
outrem.setInputCloud(cloud);
// 设置滤波半径
outrem.setRadiusSearch(
0.8);
// 设置滤波最少近邻数
outrem.setMinNeighborsInRadius (
2);
// 执行半径滤波
outrem.filter (*cloud_filtered);
如果第一次使用 PCL 的滤波器,可以把这个教程自己运行一遍,我之前运行过了,这次就不贴代码了,下面分享下我在实际项目中如果使用这个半径滤波器对我的 octomap_server 构建的八叉树地图进行滤波。
三、给我的地图滤波
3.1 定义半径滤波器参数
半径滤波器有 2 个参数:滤波半径和半径内部邻居数,注意数据类型
// 滤波半径
double m_outrem_radius;
// 半径内的邻居数
int m_outrem_neighbors;
在构造函数初始化列表中初始化:
OctomapServer::OctomapServer(const ros::NodeHandle private_nh_, const ros::NodeHandle &nh_)
: ...,
m_outrem_radius(-std::numeric_limits<double>::max()),
m_outrem_neighbors(-std::numeric_limits<int>::max()),
...
从 launch 中读取启动参数:
// add outrem filter
m_nh_private.param("outrem_radius", m_outrem_radius, m_outrem_radius);
m_nh_private.param("outrem_neighbors", m_outrem_neighbors, m_outrem_neighbors);
3.2 执行半径滤波
在 InsertPointCloudCallBack 函数的 PassThough 前执行半径滤波,即对每一帧点云在构建八叉树地图前进行滤波,主要是为了去掉单独的离群点:
// 对一帧 pc 点云进行半径滤波
pcl::RadiusOutlierRemoval
outrem;
// 这里需要传递指针,因为我的 pc 不是指针,所以这里做了 makeShared
outrem.setInputCloud(pc.makeShared());
// 设置滤波半径,这里设置为 1m
outrem.setRadiusSearch(m_outrem_radius);
// 设置滤波近邻数,这里设置为 10 个
outrem.setMinNeighborsInRadius (m_outrem_neighbors);
// 执行滤波
outrem.filter(pc);
3.3 在 launch 中配置半径滤波器参数
<param name = "outrem_radius" type = "double" value = "1.0">
<param name = "outrem_neighbors" type = "int" value = "10">
这样以后就可以从 launch 中直接配置滤波器的参数了,不用每次修改再重新编译,这样调试起来非常方便。
3.4 滤波结果
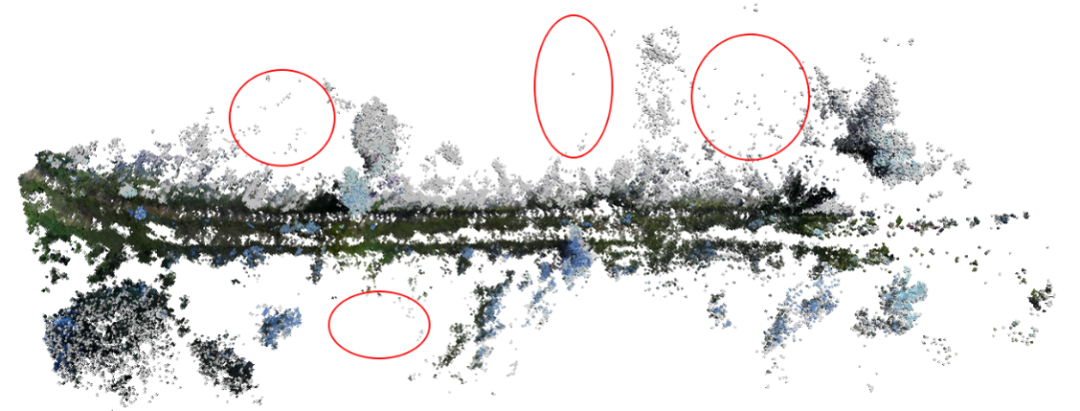
这是原始地图,15cm 分辨率,红框内部有很多单个的点:
这是滤波后的效果,滤波半径 1m,近邻点 10 个:
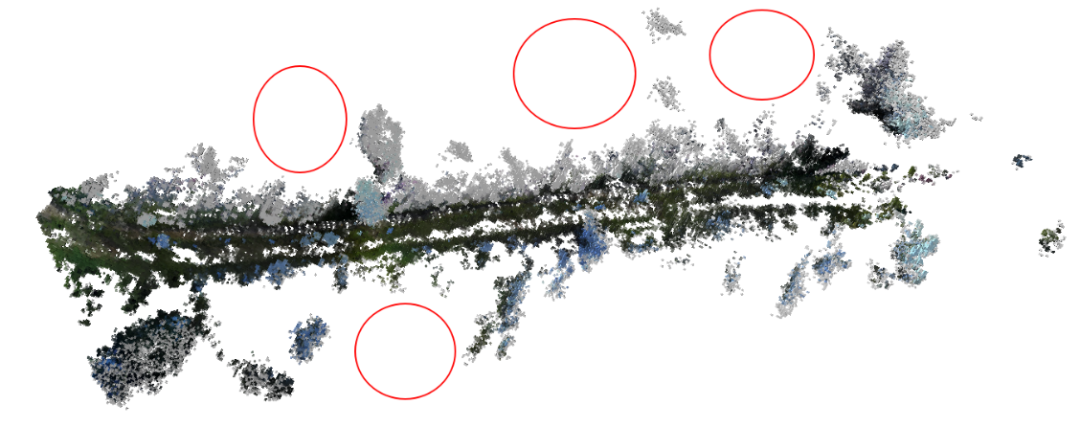
效果还是可以的,希望能对你有帮助,如果使用其他的滤波器,按照官方的教程来就行了,掌握学习方法才是最重要的:)
推荐阅读:
厦大同学,与你分享编程,AI 算法等技术干货!精品文章创作不易,谢谢关注,欢迎在看。

点击阅读原文,查看更多精彩文章!