跨视角语义分割前沿进展|IROS 2020
极市导读
本文作者基于自己的论文研究从发展背景开始阐述了跨视角语义分割前沿的进展,文中着重介绍了跨视角语义分割的方法:利用一个仿真环境+半监督域适应的流程缓解没有真实数据的问题,提出了一种视角转换模块插入到编码器和解码器之间解决传统2D语义分割的模型结构不能直接套用的问题。>>加入极市CV技术交流群,走在计算机视觉的最前沿
作者简介
潘柏文,麻省理工学院计算机科学与人工智能实验室博士二年级在读,师从Prof. Aude Oliva。2019年本科毕业于上海交通大学电子工程专业。他的研究兴趣包括计算机视觉和机器学习。
个人主页:http://people.csail.mit.edu/bpan/
背景
语义分割(Semantic Segmentation)说到底还是为了让人工智体更好的去理解场景(Scene Understanding)。什么是理解场景?当我们在说让一个智体去理解场景的时候,我们究竟在讨论什么?这其中包含很多,场景中物体的语义,属性,场景与物体之间的相对关系,场景中人与物体的交互关系,等等。说实话很难用一句话来概括,很多研究工作往往也都是在有限的任务范围下给出了机器人理解其所视场景的定义。那么为什么语义分割对于场景理解来说这么重要?因为不管怎么说,场景理解中有些要素是绕不开的,例如目标物体的语义, 目标物体的坐标。当我们真正要应用场景理解的技术到实际生活中时,这两个点几乎是必需的。而语义分割恰好能够同时提供这两种重要的信息。
传统的 2D 图像语义分割技术经过众多研究人员几年时间不停的迭代,已经发展到了一个提升相当困难的时期。同时这也意味着这项技术已经渐渐的趋于成熟。但传统的 2D 分割还是有一定的局限性,比如我们很难从 2D 图像中直接获知物体的空间位置,以及其在整体空间中的布局。这很直观,因为 2D 图像捅破天也只有 2D 信息,想知道整体空间的位置信息还是需要更多的 3D 信息。事实上,这件事已经有相当一部分人在做了。为了让单纯的 2D 图像(RGB)具有深度信息从而转变成 RGB-D,我们发展了深度估计(Depth Estimation);为了让 RGB-D 变成真正有用的 3D 信息,我们发展了三维重建(3D Reconstruction)技术;为了得到整个场景的三维点云,我们发展了 SLAM;为了得到场景中点云的语义信息,我们又发展了基于点云的语义分割技术。这一整套流程下来,我们可以让机器人从单纯的 2D 图像出发,得到空间中物体三维的坐标,语义,和边界信息。这一连串的思路十分完备,也非常本质。然而 3D 数据往往又面临着极为昂贵的计算成本与数据采集和标注的成本,不像 2D 数据有一台手机就能采集,对于标注人员来说也不如 2D 图像的标注来的那么直观。
方法介绍
那么我们能不能依旧基于2D图像,让机器人对于整个空间中物体的坐标有更好的感知?
答案是肯定的。其实在相当一部分实际任务中,得到物体准确的 3D 坐标是一件精确过头的事,就好比能用16位浮点数解决的任务我偏偏要用32位,可以但不是必要。很多时候我们需要 3D 坐标只是因为这是一个清晰的,看得见摸得着的,具体的数值目标。但再好的数值目标,跟实际使用体验的关联性也不是百分百对应的。就好像损失函数低不一定代表最后的准确率就高,数值准确率高不一定代表实际的人眼效果就好。扯远了,话说回来,基于以上我所说的,我们在求解准确的 3D 信息所需要的代价与传统的 2D 分割的局限之间找到了一个平衡点,也就是利用俯视语义图(Top-down-view Semantic Map)来感知周围环境物体的方位与布局。
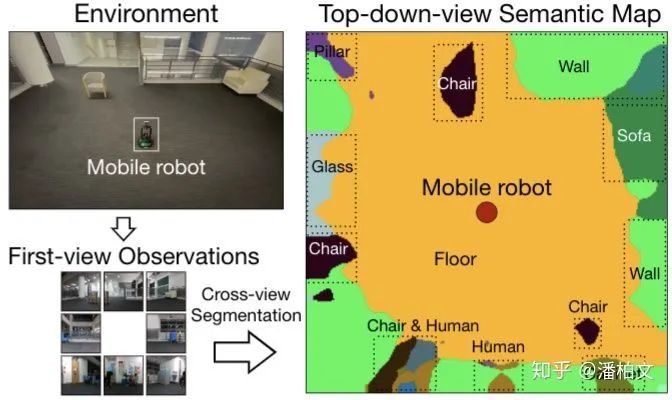
俯视语义图(Top-down-view Semantic Map)
我们把从第一视角的 2D 图像(First-view Observation)得到俯视语义图(Top-down-view Semantic Map)的过程称作跨视角语义分割(Cross-view Semantic Segmentation)。跨视角语义分割与传统 2D 语义分割的区别在于我们得到的不再是一张与原图逐像素对应的语义图,而是一张俯视视角下看到的周围环境的语义图。另外对于模型的输入来说,跨视角语义分割的输入从 2D 语义分割的一张 RGB 图变成了多张第一视角的任意模态的图(RGB,Semantic Mask,Depth)。
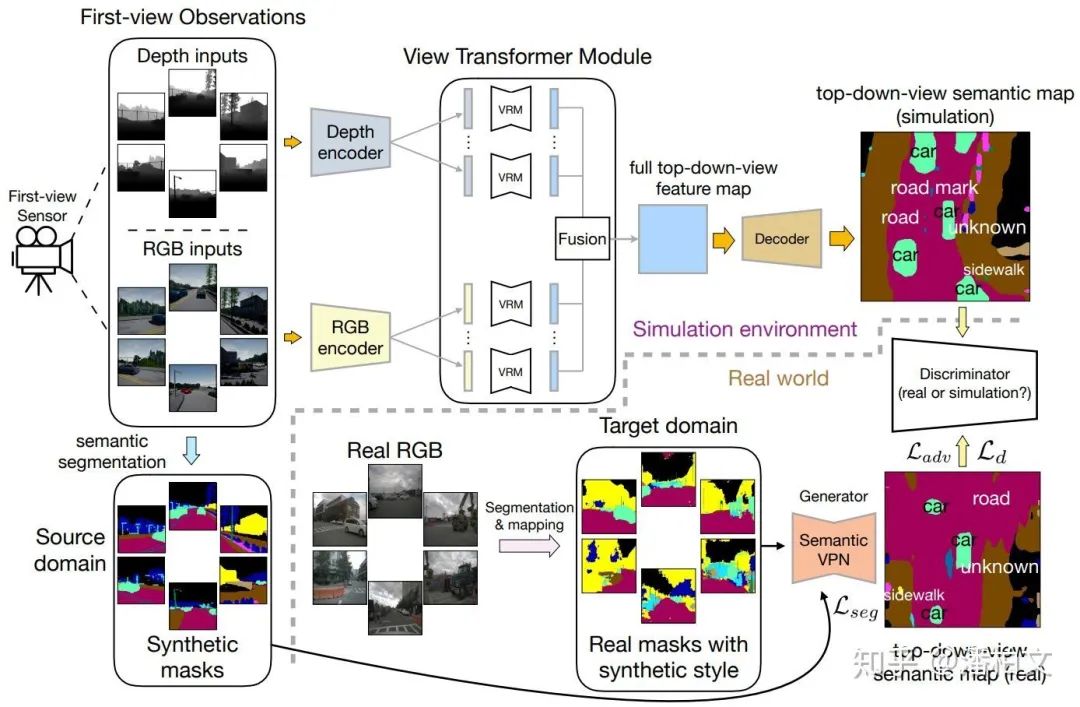
由于这是一个新问题,现有的语义分割数据集并不支持我们去训练这样一个跨视角语义分割的模型。我们于是将目光投向了一些模拟仿真环境(Simulated Environment),例如 House3D,Gibson Environment,Matterport3D。我们从这些模拟仿真环境中提取第一视角的图像以及对应的俯视语义图,从而完成训练过程。然而仿真环境中提取的图像与真实世界的图像还是有着很大的差别,因此我们在部署我们的模型到真实世界的时候还做了一步半监督的域适应(Domain Adaptation)。我们利用这样一个仿真环境+半监督域适应的流程暂时缓解了没有真实数据的问题。但是在未来如果我们需要对这个方向进行长足的发展,真实世界的数据仍然是不可或缺的。
从模型结构的角度来看,我们的实验发现,由于不存在像素级的对应关系,传统2D语义分割的模型结构并不能直接套用在我们跨视角语义分割的任务上。然而为了能够继承这些极为优秀的,凝结了许多前人智慧的传统 2D 语义分割的模型结构,我们提出了一种视角转换模块(View Transformer Module)插入到编码器(Encoder)和解码器(Decoder)之间。这种视角转换模块保持了原来的模型结构,从而在跨视角语义分割任务上更好的发挥作用。
整体框架图
我们这项工作《Cross-view Semantic Segmentation for Sensing Surroundings》在今年上半年的时候被期刊 RA-L 收录,同时这几天也在 IROS 2020 大会上展示。文章展示了更多的方法与实验上的细节。我们针对这个问题做了很多实验,对比了一些其他方法比如传统 3D 投影,基于图像生成模型的方法,探究了视角转换器真正的作用,展示了很多真实世界中的跨视角分割效果图,还设计了两个室内导航的小实验,其中一个在真实的机器人上也做了实验。感兴趣的同学可以戳我们的项目主页。
IROS 2020会议举办时,但是因为疫情的关系大会改成了线上举办的模式,文章全被做成视频放在了https://www.iros2020.org/ondemand/上供大家自由探索,没有与作者的互动,因此希望能借这篇文章以这种形式向大家介绍一下我们的工作。有任何想法都可以随时通过邮件找我交流,期待能激发大家的一些想法,一起推动这个领域的发展。
结语
这项工作是我与周博磊老师深度合作的第一个项目,项目的主体部分其实在2018年的时候就已经完成的差不多了。那时我还在读本科,刚到 MIT 实习,周老师刚从 MIT 博士毕业,到 CUHK 开始教职生涯。但不料想这篇文章前前后后被拒了大概三四次,修修补补了两年,直到今年年初才发出来。现在我开启了我的 PhD 生涯,周老师在香港组建了他的团队,声势逐渐浩大,一晃两年了。这是我第一篇被连拒的文章(以后或许会有更多),每次从被拒到修改再投的过程都是对于心态的一次磨炼,也是对文章本身更加深刻的思考。非常感谢周老师的鼓励,敦促与指导。最近伯克利,FAIR,NVIDIA 等一些机构发表了几篇与我们这项工作密切相关的文章,也让我越来越相信我们这项工作的意义,希望能给大家带来一点启发。感谢!
论文地址:https://arxiv.org/pdf/1906.03560.pdf
推荐阅读