
【03】高精度地图
共 2246字,需浏览 5分钟
·
2021-08-22 18:21
1.高精度地图(HD map)
我们先回忆回忆,在你开车的时候,你打开地图导航,它会给你推荐几条合适的路径,甚至有些时候它可以显示这些道路是否拥堵,道路的限速甚至是交通管制信息,在得到这些信息之后,结合你自己大脑对环境的判断,就可以控制车辆的驾驶了,这种地图就是被我们熟知的导航地图。
但是对于无人驾驶而言,这其实是不够的,因为无人驾驶车辆缺乏人类驾驶员固有的视觉和逻辑能力的,比如我们驾驶员可以根据当前的GPS的定位和周围的环境确定我们当前的位置,我们可以轻易的判断红绿灯的位置、道路的宽度等等,但是无人驾驶不可以,所以我们要创建一套非常高精度的地图帮助无人驾驶车辆认识周围的环境。
2.高精度地图里有什么?
高精度地图包含了大量的辅助信息,最重要的是,它还包括了例如交叉路口布局和路标位置、等道路网的精确三维表征。
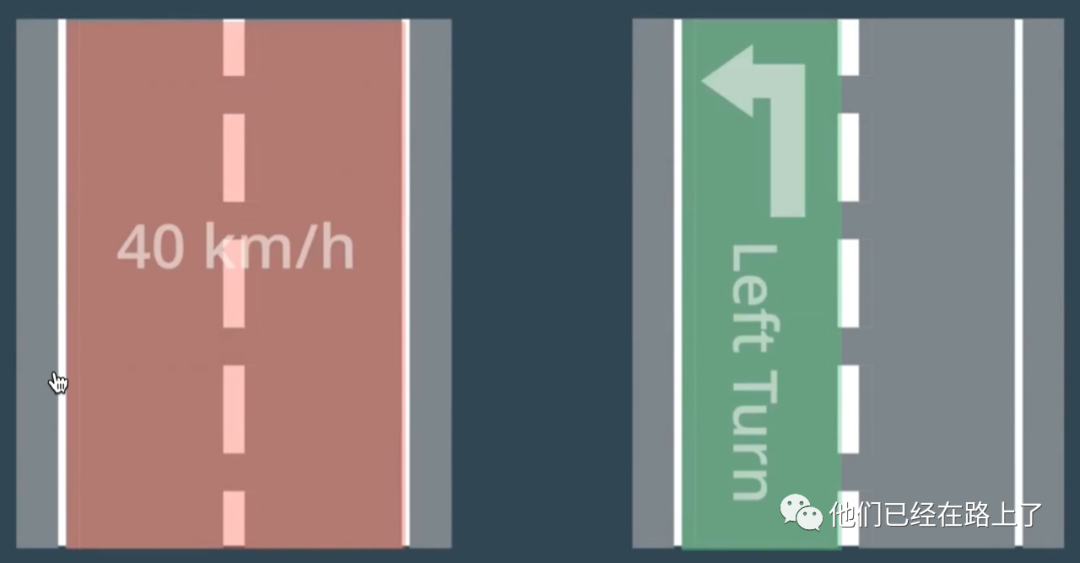
除此之外,高精度地图还包括很多语义信息,地图上会报告交通灯上不同颜色的含义、可以指示道路的速度限制、甚至可以包含左右变道或左转右转的开始位置。
高精度地图还有一个重要的特征就是精度,通常手机导航最多达到米级别的精度,而高精度地图是需要达到厘米级的精度的,可以想像,如果无人驾驶的车辆是以米级别的精度驾驶,那危险性不言而喻了。
3.高精度地图的应用
高精度地图是无人驾驶核心之一,许多的模块都需要依赖于高精度地图。
3.1 与定位的应用:
无人车先根据GPS获取到大致的定位,然后再根据相机、雷达点云等收集到的数据与高精度地图内的标志物进行比对,就可以得到精确的坐标。当然说起来容易做起来难,这个步骤需要经过数据预处理、坐标转换和数据融合的复杂过程。
•预处理:消除了不准确或质量差的数据。•坐标转换:将来自不同视角的数据转换为同一个坐标系。•数据融合:将来自车辆上各种传感器的数据进行合并。
完成了这个过程后,我们就实现了确认自车位置的工作。
3.2 与感知的应用
无人驾驶车还可以根据高精度地图去辅助感知的工作。
每一种传感器感知的距离都是有上限的,这就像我们的眼睛和耳朵,我们没法看到或听到太远的地方。在恶劣的天气条件下或夜间,传感器的感知能力会进一步降低。
除此之外,如果传感器受到一些障碍物的影响后,他也无法透过障碍物感知障碍物后面的信息,例如车辆旁边开过来一辆公交车,那么公交车的另一侧到底是什么,无人车是无法感知的。
这些情况下,高精度地图发挥了很大的作用。举个例子,比如传感器受到干扰没有检测到交通信号灯,此时高精度地图也可以将交通信号灯的位置提供给软件栈的其他部分,来帮助汽车做下一个决策。
还有一个好处,高精度地图可以帮助传感器减少检测范围,例如高精度地图先设定好了在一个特定的区域内寻找停车标志,传感器就可以集中在该位置检测停车标志,这种区域就被称为感兴趣区域或ROI。ROI可以帮助我们提高检测精确度和速度,并节约计算资源。
3.3 与规划的应用
就像定位和感知会依赖于高精度地图一样,规划功能也是如此的。高精度地图可以帮助车辆找到合适的行车空间,它也可以帮助规划去确定不同的路线选择,还可以帮助预测模块预测道路上其他车辆的行驶位置。
我们看几个典型的场景:
•高精度地图可以帮助车辆识别车道的确切的中心线位置,这样车辆就可以尽可能的靠中心行驶,这里虽然计算机视觉也会帮助识别车道线来辅助驾驶,但是多一种功能和方法自然是多一层保障。•在一些有人行横道或减速带的区域,高精度地图可以让车辆提前查看并预先减速。•如果前方有障碍物,车辆可能需要进行变道,高精度地图可以帮助车辆缩小选择范围,以便选择最佳方案。
4.高精度地图的构建
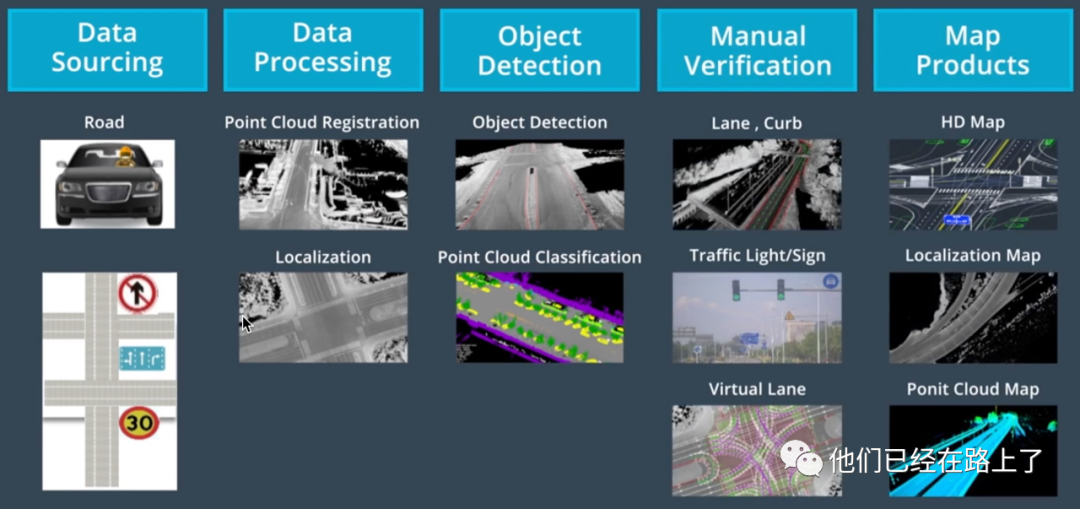
高精度地图的构建由五个过程组成:
数据采集 -> 数据处理 -> 对象检测 -> 手动验证 -> 地图发布
4.1 数据采集
数据采集是一项庞大的密集型工作,百度Apollo有数百辆调查车负责收集用于制作地图的源数据。调查车辆一方面在进行地图的构建,另一方面也在对地图进行维护和更新,道路、建筑物这些标志物在不断的变化,公共事业的工作人员也经常对道路进行拆除和重新铺设,这就给地图采集带来了很大的难度。(所以我们可以想像,在封闭场景内的地图构建会容易得多,因为我们可以约束场景变化的频率,毕竟我们无法要求开放场景的单位每次变更之前都提前通知我们)
调查车一般会安装这些传感器:
•GPS + IMU(惯性测量单元)•Lidar(激光雷达)•Camera(摄像机)

这些传感器从不同角度感知环境变化,提供原始数据。
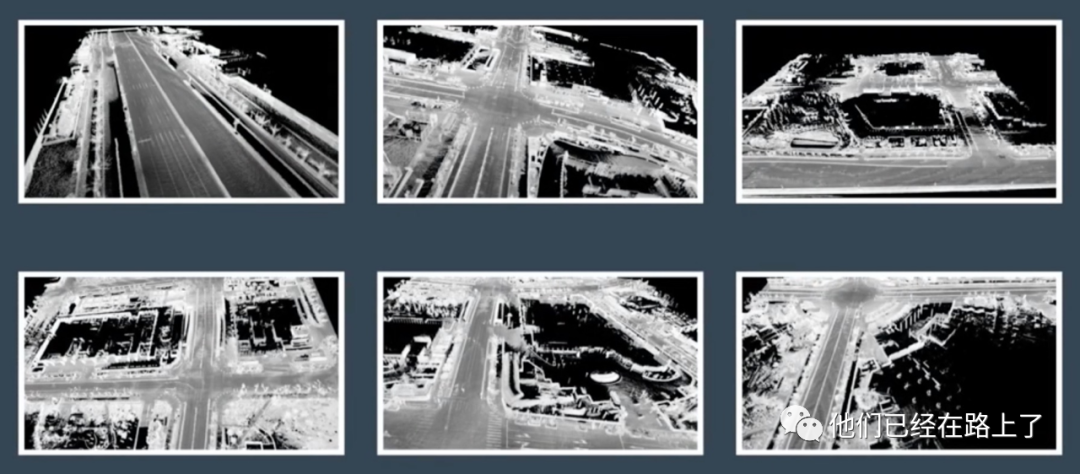
4.2 数据处理
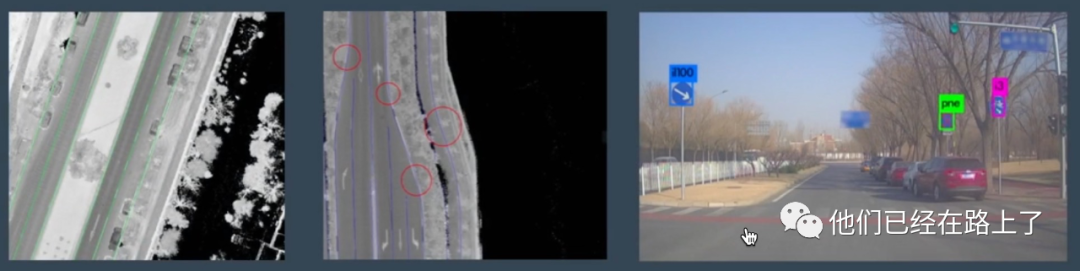
数据处理是指对收集到的数据进行整理、分类及清洗,以获得暂时没有任何语义信息或注释的初始地图模板。例如下图,就是雷达点云收集到的一段数据融合而成的。
4.3 对象检测与手动验证
对象检测通常使用人工智能来检测静态对象,并对其进行分类,其中包括车道线、交通标志、电线杆。
当然了,也可以使用手动标注的方式来标记对象。
手动验证可以确保人工智能标注过程的结果正确性并及时进行纠错。
4.4 地图发布
在经过了数据采集、数据处理、对象检测、手动验证之后,地图就可以发布了。
今天我们阐述了高精度地图在无人驾驶中的使用,后续我们会进一步展开,现阶段指示熟悉其基本概念,拜拜~