
导师给我的课题是激光SLAM,应该如何入门?
新机器视觉
共 5658字,需浏览 12分钟
·
2021-10-20 23:41
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
小虎哥哥爱学习:
1.1.关于SLAM
1.2.关于ROS
1.3.SLAM与ROS的关系 2.ROS移动机器人的整体构造
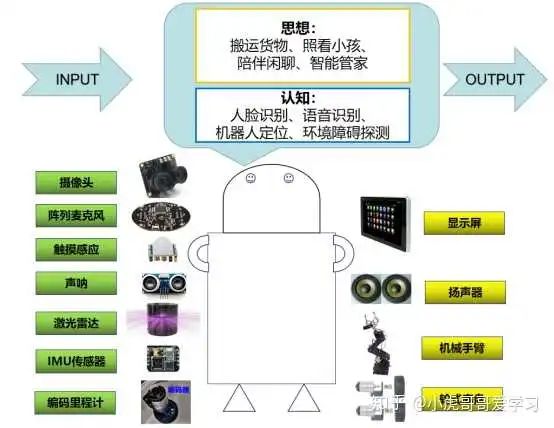
2.1.硬件构造解析
2.2.电机解析
2.3.电机驱动板解析
2.4.底盘驱动方式的解析
2.5.IMU模块解析
2.6.激光雷达解析
2.7.ROS主机解析
2.8.摄像头解析 3.商业应用ROS机器人
3.1.SLAM建图导航的应用案例
3.2.商业ROS机器人相关公司
3.3.商业ROS机器人两大发展思路 4.科研学习ROS机器人
4.1.科研学习ROS机器人与商业应用ROS机器人的区别
4.2.淘宝上科研学习ROS机器人相关产品
4.3.选购ROS机器人入门指南
1.SLAM与ROS的关系
1.1.关于SLAM
(1)机器人中的不确定性
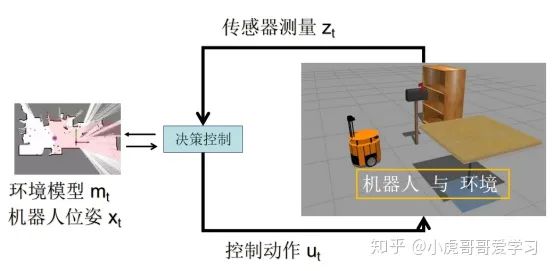
(2)机器人中的状态估计
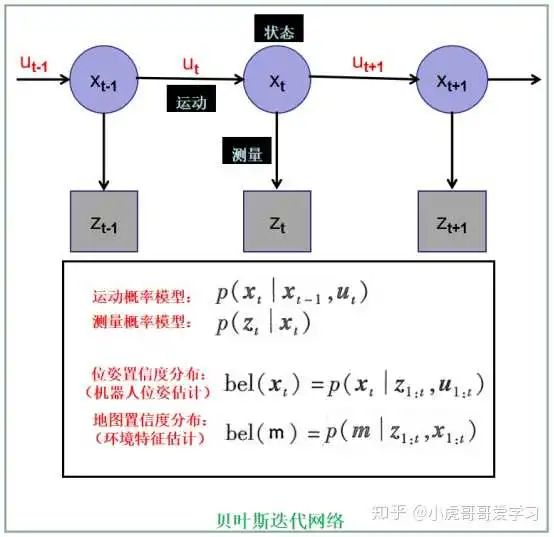
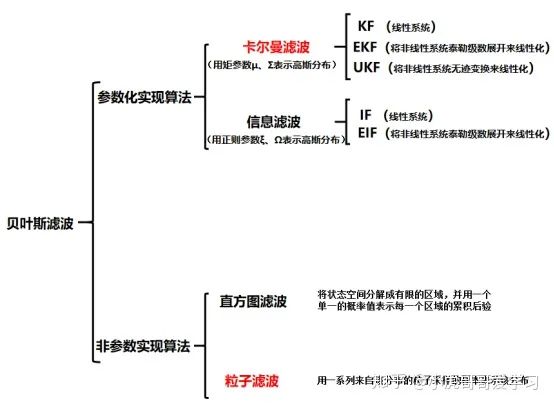
(3)贝叶斯滤波及其各种实现算法
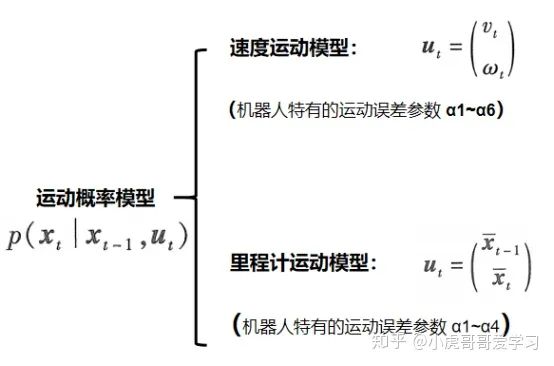
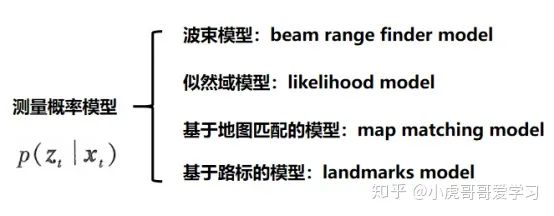
(4)机器人中的运动与测量概率
(5)移动机器人定位与建图
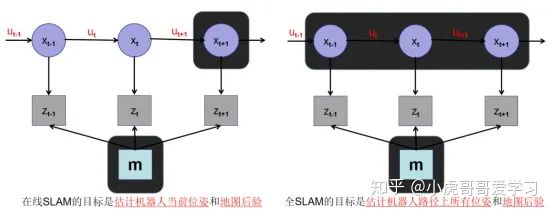
(6)SLAM同时定位与建图
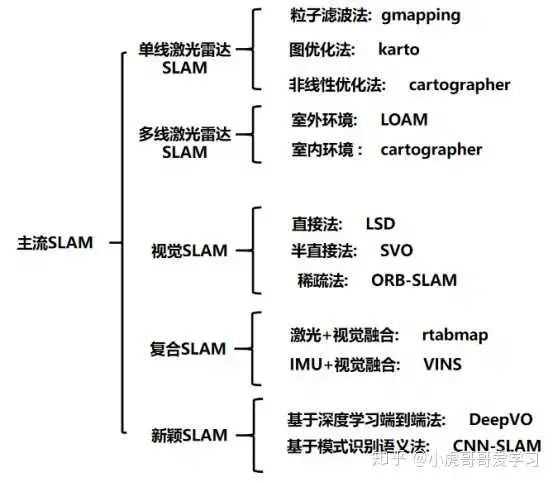
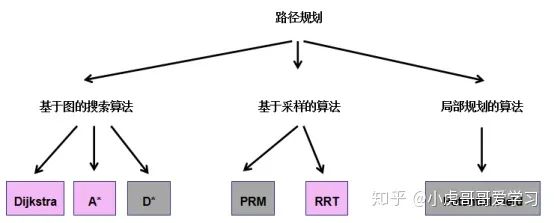
(7)现今主流的SLAM算法
(8)机器人自主导航与动态避障
1.2.关于ROS
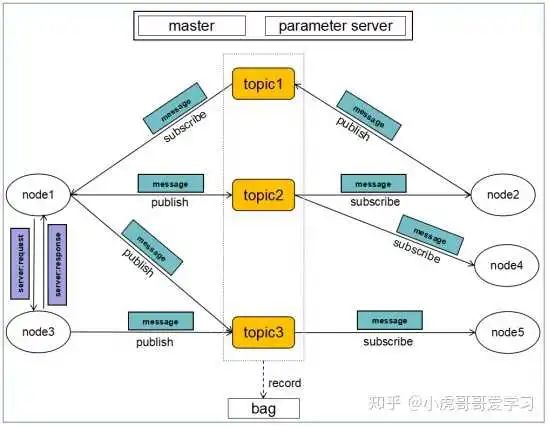
1.3.SLAM与ROS的关系
2.ROS移动机器人的整体构造

3.商业应用ROS机器人
(1)智慧农业自动喷药机器人
(2)智慧餐厅送餐机器人
(3)楼宇送快递机器人
(4)大型机房智能巡检机器人
(1)日本软银集团pepper
(2)北京进化者机器人公司的小胖
(3)上海思岚科技的ZEUS
(4)上海高仙机器人公司的室外机器人
(5)云迹科技的大润机器人
(6)交通银行大堂机器人娇娇
(1)核心部件
(2)系统集成
4.科研学习ROS机器人
4.1.科研学习ROS机器人与商业应用ROS机器人的区别
4.2.淘宝上科研学习ROS机器人相关产品
(1)Pioneer先锋机器人 (2)Turtlebot海龟机器人
(2)Turtlebot海龟机器人 (3)EAI移动底盘(4)miiboo语音交互移动机器人
(3)EAI移动底盘(4)miiboo语音交互移动机器人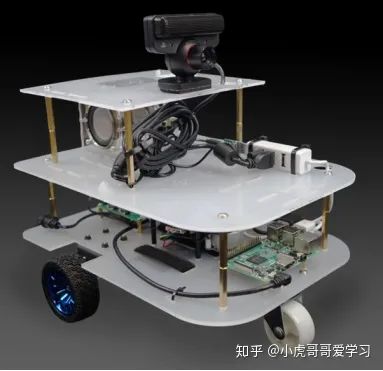
 (5)淘宝上眼花缭乱的ROS机器人
(5)淘宝上眼花缭乱的ROS机器人
4.3.选购ROS机器人入门指南
fly qq:
知乎用户:
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!
评论