
用于道路目标检测的少镜头学习
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

在深度学习的进化过程中,少镜头学习一直是一个备受关注的问题。在这项工作中,我们考虑的问题少射击目标检测(FSOD)在真实世界,类不平衡的场景。在我们的实验中,我们使用了印度驾驶数据集(IDD),因为它在图像数据集中包含了一类较少发生的道路对象,因此提供了适合于少镜头学习的设置。我们评估metric-learning和基于元学习FSOD方法,在两个实验设置:(i)代表(同一域)分裂IDD,评估的能力模型的上下文中学习道路图像,和(2)对象类less-occurring对象样本,类似于现实世界的开集设置。从我们的实验中,我们证明了度量学习方法在新类上比元学习(i)在同一域上有11.2个地图点,和(ii)在开放集上有1.0个地图点。我们还表明,我们在真实世界开放数据集中的对象类扩展为少镜头学习研究提供了丰富的基础。
在这项工作中,我们关注的问题,少镜头目标检测,并扩展训练有素的目标检测器的能力与基类,以新的类道路目标检测。我们的贡献包括:
1.演示了在驾驶环境下的现实世界图像中的少镜头学习方法。
2.扩展现有的对象类,在开放数据集中使用较少发生的对象样本,以显示从少数样本学习的可行性和有效性。
3.在现实世界的目标检测问题中,度量和元学习方法的分析。
据我们所知,现有的作品中没有一个展示了在驾驶场景中对真实图像的少量学习。
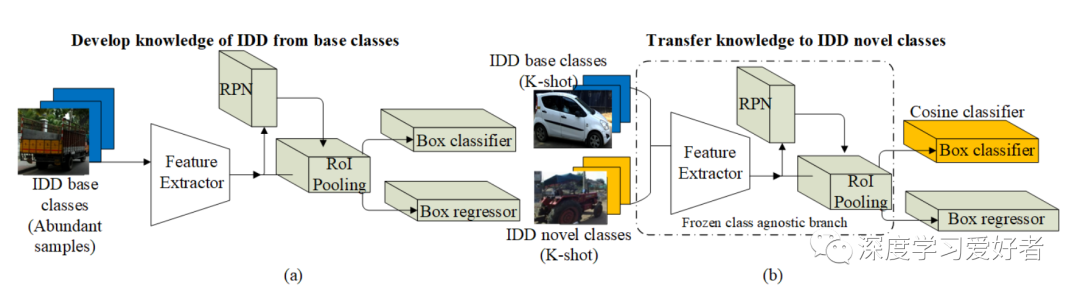
两阶段微调架构:(a)基础训练阶段,即网络从基础数据集中的丰富样本中学习;(b)微调阶段,即网络适应少量的样本。
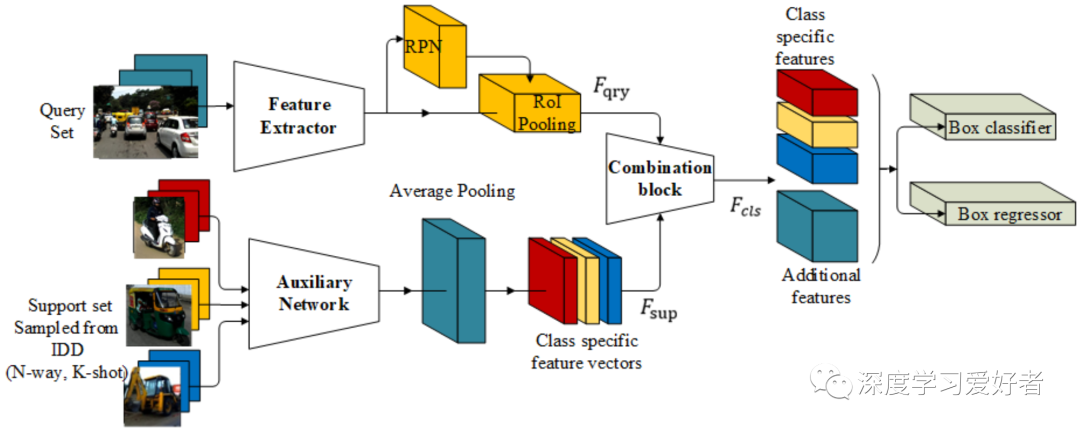
本文采用了基于元学习的少镜头目标检测体系结构。改编自(Yan et al. 2019;Xiao and Marlet 2020)。
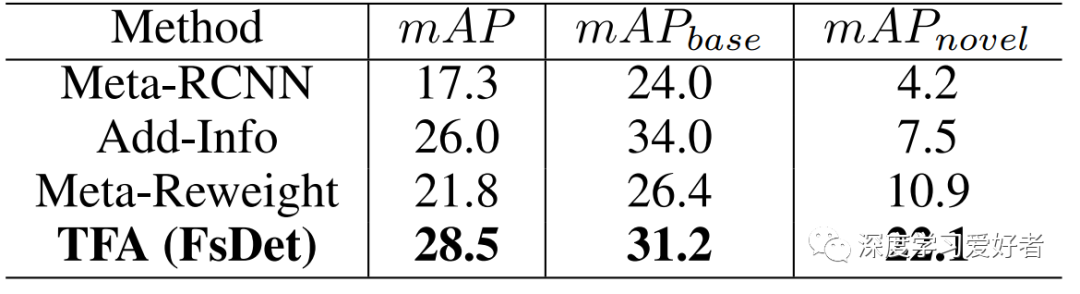 IDD-10 split 1上使用10个镜头样本的少镜头目标检测性能(mAP50)。
IDD-10 split 1上使用10个镜头样本的少镜头目标检测性能(mAP50)。
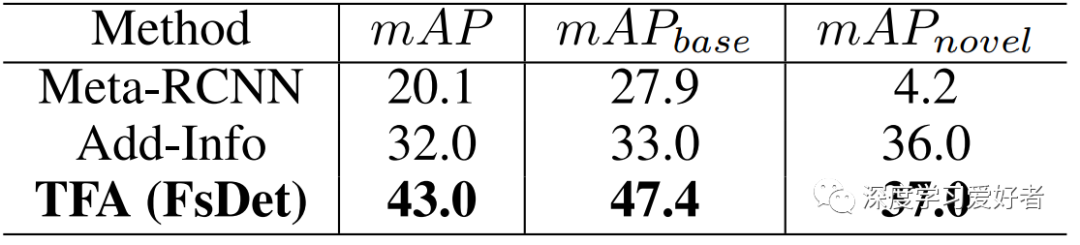
IDD-OS分割上使用10个镜头样本的少镜头目标检测性能(mAP50)。
我们分析了少数镜头对象检测的最先进方法的性能,使用真实世界数据集(IDD),它固有地包含来自驾驶场景的类不平衡数据。我们的评估方法是两个任务:同域和开集表示。为了评估这些设置,我们在开放集表示中使用额外的类标签扩展了一个公开可用的数据集。通过创建IDD的扩展,我们希望为未来使用真实数据集进行少镜头学习的工作铺平道路。实验结果表明,基于余弦相似度的TFA网络(FsDet)在新类别性能上分别比基于金属学习的网络表现出11.2和1.0的映射点。我们的结论是,元学习网络在取得巨大进步的同时,倾向于在基于度量学习的方法中执行更简单的基线。我们也观察到,课堂困惑在任何短时间学习范式中仍然是一个公开的挑战,并可以成为进一步改进的焦点。
论文链接:https://arxiv.org/pdf/2101.12543.pdf
每日坚持论文分享不易,如果喜欢我们的内容,希望可以推荐或者转发给周围的同学。
- END -
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~