关于太空中GNSS应用的探讨
在过去几年中,GNSS系统在空旷场景中达到了很好的定位效果,然而在城市区域、隧道等地区的定位工作依然是研究的热点。本文主要探讨复杂环境中GNSS系统的使用。
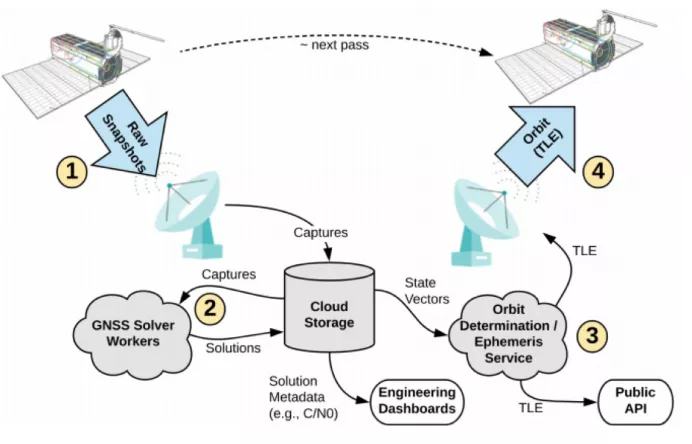
图 1 Dove GNSS 定规路径
轨道模型通过非线性最小二乘法拟合到GNSS状态向量。轨道模型由笛卡尔状态向量和弹道系数组成。整个处理流程是自动化的,运行在可扩展的云计算解决方案上。将GNSS样本处理从卫星上移开的代价是增加轨道确定过程的延迟。
《低轨飞行任务中空间GNSS接收机的精确实时在轨轨道确定(P2OD)性能评估》这篇文章介绍了空间PPP接收机在典型LEO任务中的首次实验室性能评估,目标是达到技术成熟水平(TRL-6),并在空间环境下进行了系统原型演示。
为了进行初步的P2OD算法评估,研究人员使用了Sentinel-3A数据、Fugro的PPP软件和精确的GPS轨道/时钟(参考天线参考点(ARP))对动态PPP解决方案与从质量轨道和姿态信息(四元数)中心获得的基于ARP的Sentinel-3A轨道进行了比较。已为2018年5月的每一天生成了两种运动学解:
PVT解决方案:使用广播星历表(导航数据)通过载波相位测量平滑双频伪距。PVT精度(3D RMS)显示位置为1.28 m 3D RMS,速度为2.1 cm/s。
PPP解决方案:双频伪距和载波相位测量,使用Fugro的精确GPS轨道/时钟。PPP解决方案精度(3D RMS)实现位置为8cm,速度为4mm/s。结果表明,使用Sentinel-3A数据时,PPP收敛时间为15-20分钟,仅基于GPS L1/L2数据。由于双星群(GPS+Galileo)卫星数量的增加以及现代化GNSS信号伪距噪声的降低,预计精确定位时间(TTPF)将得到实际改善。
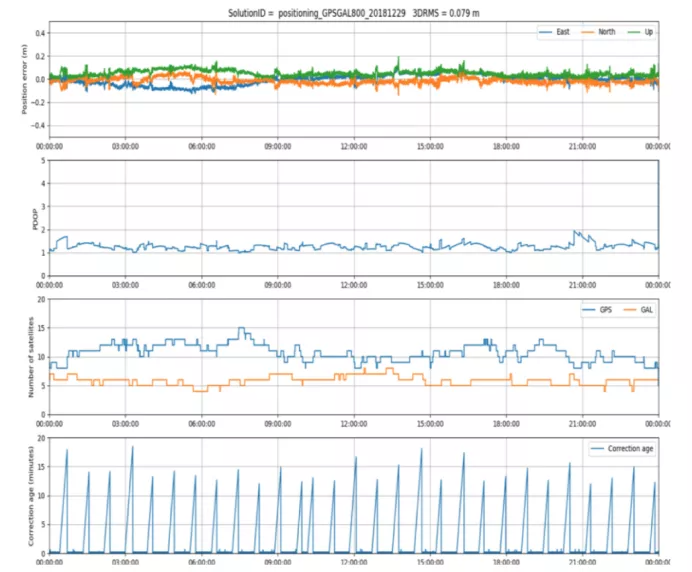
图 2 奥斯陆 GPS+GAL PPP 定位结果
PPP数据校正链路将使用国际海事卫星组织的L波段实时信号和L波段调制器进行验证,该调制器将用于模拟预计在低轨轨道上增加的多普勒,使用射频星座模拟器(RFCS)测试原始GNSS测量(如伪距、载波相位等)和独立双频PVT解决方案的质量。模拟的全球导航卫星系统接收器轨迹可以从低轨卫星(如ESA-EO)的真实任务后精密星历中提取,也可以从低轨轨道的任意表示中提取。除了此机载吊舱精度验证外,还将使用射频星座模拟器和实验室试验台来支持性能和功能要求的验证,如冷启动和热启动能力、首次修复时间(TTFF)、精确修复时间(TTPF):故障检测。接插和卸载功能、地面可升级性能等。
系统的原型目前由Deimos Space UK领导的联营集团根据ESA(欧洲航天局)的合同进行开发,计划于2020-2021年进行CubeSat在轨示范。该文持续进行的验证活动的初步结果显示了该集团迫切希望在实际场景条件下所进行的性能验证是非常有前景的。
1. J.M. Palomo, P. D'angelo, P. F. Silva, A.J. Fernández, DEIMOS Space, Spain; P. Giordano, P. Zoccarato, ESA-ESTEC; J. Tegedor, O. Oerpen, Fugro Norway AS, Norway; L.B. Hansen, GomSpace A/S; C. Hill, T. Moore, The University of Nottingham, UK. Space GNSS Receiver Performance results with Precise Real-Time On-board Orbit Determination (P2OD) in LEO Missions. ION GNSS+ 2019.
更多行业动态资讯