
机器视觉光源介绍及常用打光方式和技巧
击上方“机器视觉”,点右上角...选择“置顶/星标”公众号
接收最新推文!
导读
1、 光源简介
2、 打光方式
打光的概念和分类
选择最合适机器视觉照明的八个小技巧
照明是怎样影响机器视觉应用的呢?
技巧1:使用亮光去检测材料缺损
技巧2:对于精确组件定位使用合适的波长
技巧3:在玻璃中检测裂痕使用非漫射光
技巧4:检测透明包装使用漫射光
技巧5:使用颜色创造对比度
技巧6:针对快速移动的物体使用频闪光
技巧7:消除反射使用红外光
技巧8:使用红外光消除颜色差异
3、光源配件
4、光源选型经验
通用需求场景:
具体行业应用场景:
其他新闻
自动化专业毕业后能做什么,未来发展怎么样?
电气工程及其自动化考研难么 ?
Teledyne DALSA推出37M和67M机型,扩展了Falcon面扫相机系列
路口没车,AI 直接让红灯变绿灯!智慧城市解决方案
今年全球新安装工业机器人将达57万台
Teledyne DALSA推出新款 Falcon面阵相机
3D ToF视觉企业如何落地工业应用
3D相机助力膝关节扫描
抢占机遇,工业机器人大研发时代到来!
视觉招聘小黑板
视觉项目供求信息
什么是光源呢?光源指的是“能发出可见光的物体,如太阳、灯、火等。物理学上指能发出电磁波的物体”。简单理解下即可,我们更感兴趣的是在视觉系统应用中,什么样的光源才是“好”光源。只有知道什么样的光源是好的光源,我们才能正确地进行光源选型。下面,我们给出几条“好”光源的标准:
1. 将ROI区域(感兴趣区域)和其余部分的灰度值差异加大
2. 弱化非ROI区域
3. 光照强度要足够,提高信噪比,方便图像处理
4. 稳定且寿命长
5. 成本低
6. 光源的均匀性要好
上面6点中,第3、4、5、6点是光源自身的性能要求,和检测对象无关。至于第1点和第2点,除了和光源自身有关,还和检测对象有关,需要选择不同种类的光源。
目前市面上常见的光源种类主要有:LED灯、卤素灯、荧光灯、白炽灯等。这里,我们可以简单地选择LED灯即可(大部分情况下,LED优势很大)。
在进一步的选型讨论之前,我们先来学习下和光源相关的一些基本概念:显色性、色温、波长、发光强度、光照强度、光通量、相邻色和互补色。
显色性:光源对物体的显色能力,使用显色指数(Ra)表示,最高为100。
色温:表示光线中包含颜色成分的一个计量单位。
波长:波在一个振动周期内传播的距离。
发光强度:简称光强,表示光源在单位立体角内光通量的多少。
光通量:人眼能感觉的辐射功率,单位为“流明“,符号lm。
照度:单位面积上所接收可见光的光通量,单位为流明/平方米,或者称Lux/lx。
相邻色和互补色:相邻色是在色环上相邻/同种的颜色,叠加后在黑白相机中呈现浅色。互补色是在色环上相对的颜色,叠加后在黑白相机中呈现深色。色环图如下所示:
打光的概念和分类
1、正面光/入射光:相机和光源在同一测。

典型的有同轴光、环形光、条形光源的等。
2、背光/透射光:相机和光源位于被检测物体的两侧。
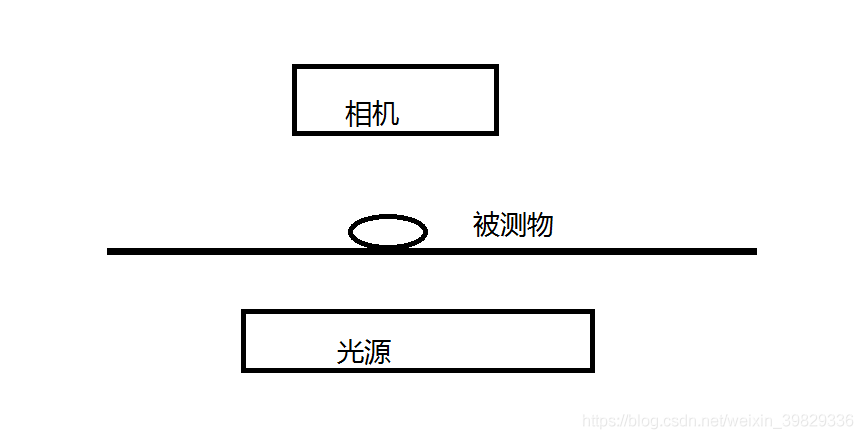
典型的光源是背光源;
3、明场照明:光源和被测物体呈一定角度,使大部分光反射到相机上;
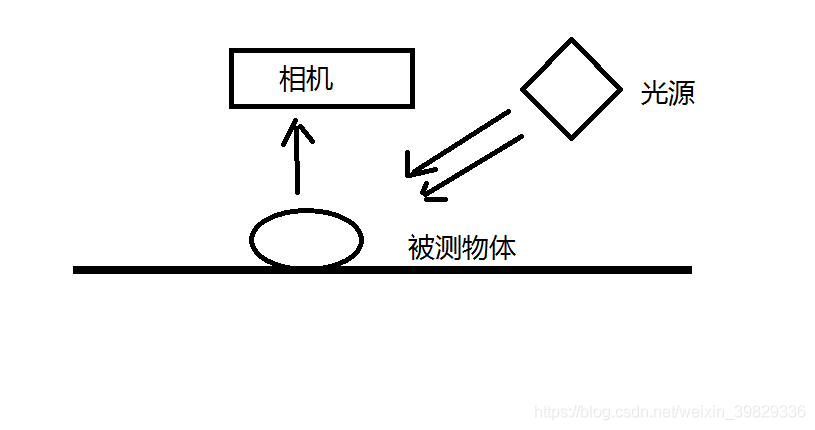
典型的高角度环形光源,条形光源等。
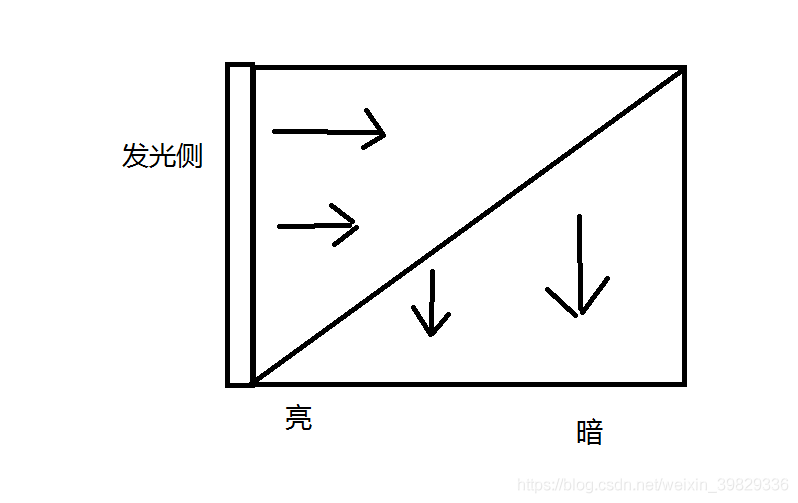
4、暗场照明:光源和被测物体呈一定的角度,使大部分光源不能反射到相机上,让少部分光或者特定的光反射到相机里;

典型的光源是低角度光源;
实际应用案例(实际使用中,仅供参考,在选择光源时,先按照常规套路选择同轴光或者环形光,再选择光源的颜色,常规套路不行嘛,就是在常规的基础上做大量测试)
(总结于自己使用的经历)在实际使用中常用的就是四种,同轴光源,环形光源,条形光源和背光源;
1、背光源:一般就是用于尺寸轮廓检测,如果使用正面照射,反射会造成虚影,损失像素,从而精度降低;
2、条形光源:大部分时候一般不单独使用一条,多用于几条组合在一起使用,构成角度光,优点比较灵活。配合拱形光滑顶面可以做成圆顶光源,均匀性比较好。
3、环形光:一般用作定位、检测特定的缺陷,很难检测一个产品上有很多种缺陷时,环形光就显的比较局促了。
4、同轴光:产品上缺陷比较多的时候,使用同轴光比较合适,例如,产品表面有发黄,油污,划伤(比较深的)等。缺点也很明显,就是光源在一定面积里有衰减,主要因为同轴光的发光原理时使用分光镜折射产生的,离光源较远的就比较暗,离光源较近的就比较亮;一般如果需要使用的话,按照我个人经验,选择比较大的同轴光,被检测物相对较小,可以选择比较均匀的位置检测
打光方式也可以分为如下几种:背部打光、高角度打光、低角度打光和投射打光。
背部打光:待检测物体在光源和相机之间。在最终的图像中,会清晰地显示物体的外轮廓。可以用来检测物体的尺寸、检测物体的放置方向、检测是否存在孔和间隙。
高角度打光:光线方向和待检测表面所成夹角比较大。高角度打光时,表面平滑的部分在图像中显示偏亮,表面结构复杂的地方,如划伤、凹痕,在图像中显示偏暗。
cvtutorials.com注释:高角度打光时候,表面平滑的部分会发生镜面反射,反射的光线会进入到相机镜头中,所以看起来比较明亮。表面结构复杂的部分会发生漫反射,只有部分光线会反射到相机镜头中,所以在图像中显示偏暗。初见高角度打光这种打光方式时,我突然就联想到了初中物理中曾经做过的一个题目,迎着月亮和背着月亮,如何分辨水坑和正常道路,背后的原理是类似的。
低角度打光:光线方向和待检测表面所成夹角比较小。低角度打光时,表面平滑的部分在图像中显示偏暗,表面结构复杂的地方,如划伤、凹痕,在图像中显示偏亮。
cvtutorials.com注释:理解镜面反射和漫反射的概念后,你可以自己尝试给出平滑偏暗、划伤偏亮背后的原因。
透射打光:待检测物体在光源和相机之间,待检测物体是半透明或者透明的。
机器视觉系统中的照明系统是极其重要的一部分,它的好坏直接影响着后面的图像处理。好的照明系统可以减少很多图像处理工作,提升整个机器视觉系统效率。那么照明是怎样一门学问呢?如何在机器视觉系统中选择合适的照明系统呢?
合适的照明是机器视觉应用成功的关键,而且是第一要考虑的部分。一个设计良好的照明系统不仅会带来更好的性能,节约时间,而且从长远来看能节约成本。下面来分享选择最合适机器视觉照明的八个小技巧,它们是:
1、检测材料缺损请使用亮度高的光;
2、精确定位请使用合适波长的光;
3、检测玻璃上的刮痕请使用非漫射的光,即Non-Diffused Light;
4、检测透明包装请使用漫射光,即Diffused Light;
5、创造对比请使用颜色光;
6、检测快速移动物体请使用频闪光;
7、消除反射时请使用红外光;
8、消除颜色变化请使用红外光。
照明是怎样影响机器视觉应用的呢?
对于将质量最为输出的机器视觉系统依赖于图像质量。高质量的图像使得系统能够精确地解释出从检测物体中提取的信息,这样就可以产生可靠的并可重复的系统性能。在任何视觉应用中需要的图像质量很大程度上取决于照明条件:颜色,角度和使用照明对象的光源数量意味着好图像之间的差异,有可能会产生更好的性能,也会带来质量差的图像,产生不好的结果。
机器视觉照明应该最大化特征对比,同时最小化其它剩下的对比度,因此让相机清晰看到部分或标记。高对比度特征简化集成和提高可靠性;对比度差的图像和不规则的照明需要来自系统的更多努力,而且也增加了处理时间。最优的照明取决于检测物体的尺寸,它的表面特征和部分几何特征和系统需求。具有宽范围的波长(颜色),视场(尺寸),对于特殊应用需要,就可以灵活的选择机器视觉照明。
当选择照明时需要考虑以下五个方面:
1、表面是光滑,还是崎岖不平?
2、表面是暗淡,还是光亮?
3、对象是弯曲的,还是平坦的?
4、条码或标记的颜色是怎样的?
5、是检测移动的物体,还是静止的对象?
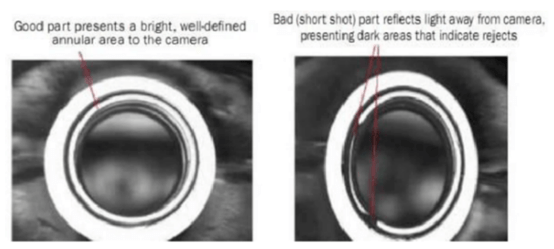
技巧1:使用亮光去检测材料缺损
比如在塑料浇注中验证是否不足
从塑料浇注应用中验证材料缺损对于确保良好的密封表面是重要的。当有材料缺损时,你有了不足的条件(比如浇注到模型中的材料不充分)。
照明技术:亮场
亮场照明技术依赖表面纹理和平坦地形。光线遇到平坦反光的表面将光线反射回到相机,创立一个亮区域。粗糙纹理或表面缺损会将光线散射而远离相机,创立了暗区域。
技巧2:对于精确组件定位使用合适的波长
比如检测倒装芯片(Flipped Chips),在PCB装配中验证合适的零件方向是常见的机器视觉应用。
照明技术:亮场
为了验证装配问题,使用蓝光波长的打亮芯片方位。这个照明技术依靠波长和同轴照明几何。蓝色波长(460 纳米)能很好地区分银质和铜质表面:铜吸收蓝光呈现出暗场,银反射蓝光呈现亮场。同轴照明几何消除错误反射:不想要的耀眼点,反射和暗点。
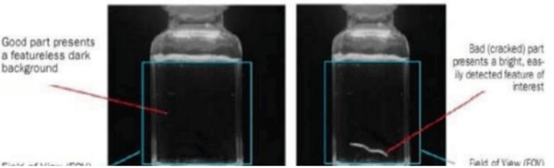
技巧3:在玻璃中检测裂痕使用非漫射光
比如检测玻璃容器上的裂痕
照明技术:暗场
在这个应用当中,用暗场照明来创立一个明亮的,在暗背景下容易检测的感兴趣特征。在一个暗场区域中光线直接通过透明的瓶子。大多数穿透透明对象的光线不会被相机检测到。如果材料不规则,比如有裂纹,一些光线就会凸显出这个不规则。特别是划痕创立了一个内部空缺,这里光线折射和反射,以许多角度散射包括返回给相机。这些光线将很难检测的划痕转换到暗背景下的亮特征。
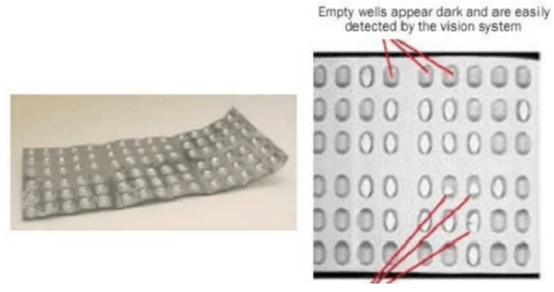
技巧4:检测透明包装使用漫射光
比如验证吸塑包装的内容
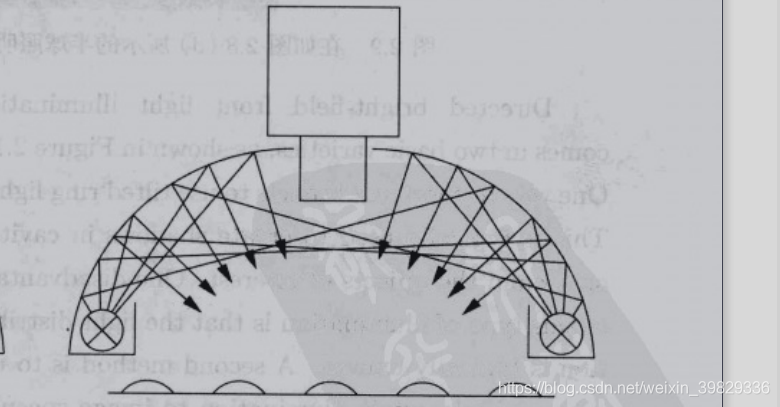
照明技术:连续漫射
连续的漫射照明技术不强调表面纹理和升高中的变化。它提供了非常大的固定照明角度,从多角度让光线找到对象上,因此消除了反射和典型的非方向性或单个光源产生的阴影。
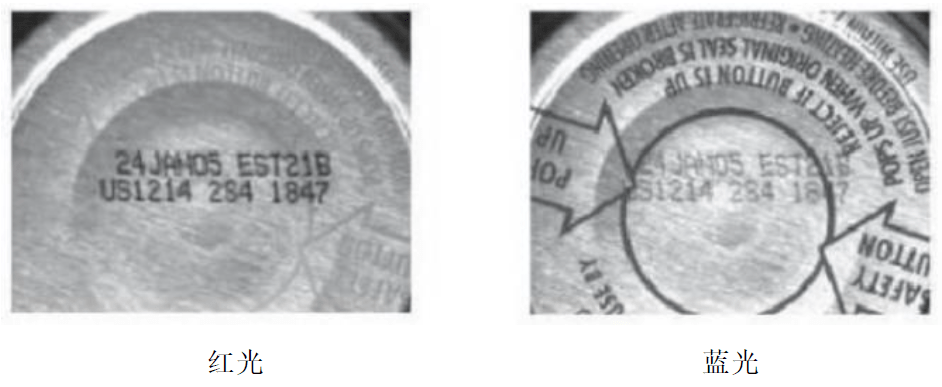
技巧5:使用颜色创造对比度
在机器视觉应用中创造一个高对比度图像的一个有用的方法是用特殊波长(彩色)的光照明物体。对于黑白相机来讲,光的波长能使得跟彩色一样的特征变亮或变暗。使用彩色轮子作为参考,选择一个相反颜色的光来使得特征变暗;或选相同颜色的光使得特征变亮。
例如:
1. 如果你想变暗的特征是红色,则使用绿光;
2. 使用绿光能使得绿色特征呈现更亮;
3. 记住铝上刻印在红光和蓝光下的区别。
技巧6:针对快速移动的物体使用频闪光
当物体快速移动成像是模糊时,就需要使用频闪光。频闪宽度 = 视场÷ 像素/移动速度
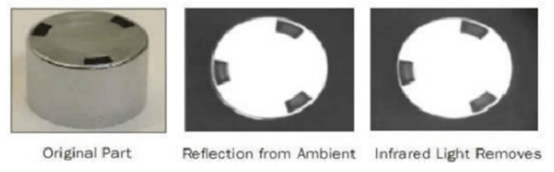
技巧7:消除反射使用红外光
机器视觉系统依靠数字图像中的灰度级转化。在许多视觉应用当中,环境光带来了不想要的亮反射,这样使得检测感兴趣特征变得困难或不可能。红外光就能解决这个问题。
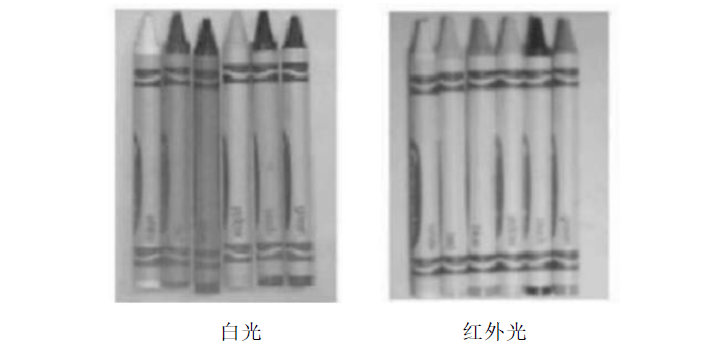
技巧8:使用红外光消除颜色差异
红外光能用于在彩色对象之间消除灰度差别。暗对象吸收红外波长,创造出一致性,而其它则呈现阴影。这个照明方案有利于检测颜色或阴影变化的非一致性。
为机器视觉系统选择合适的照明方案,需要从多方面来考虑,从这些小技巧中选择可取的,结合到自己的系统特点中去,相信会事半功倍!
3、光源配件
滤镜:在镜头前面加上滤镜可以允许一个波段的光通过滤镜,同时阻断一定波长的光通过。滤镜的选型基本步骤如下:
选择镜头口径尺寸适配的滤镜尺寸
选择允许通过光源的波段
选择合适的滤镜型号
棱镜:棱镜是“一种由两两相交但彼此均不平行的平面围成的透明物体,用以分光或使光束发生色散”。棱镜常见的分类方式如下:色散棱镜、偏转棱镜、旋转棱镜和偏移棱镜。使用棱镜的一个场景是可以几乎同时看到一个6面体的5个面。
偏光器:在光源的出光位置安装偏振片,可以将光源发射的光转换为线偏振光。在镜头前面加上偏振镜,将其旋转到合适的方向,可以有效地消除高反光,增强图像的对比度。实际工业应用场景中,尤其是在待检测对象表面光滑高反光的情况下,目标物体表面常常会出现光斑,会严重干扰图像的成像质量,可以使用偏光器提高成像质量。
光源延长线:购买光源之前,最好考虑实际场景,选择光源延长线作为附件,会为后面省下一些麻烦。
光源控制器:光源控制器有手动调节方式,也有程序控制方式,可以在视觉算法验证阶段使用手动调节方式选择合适的参数,然后使用程序进行频闪拍照,常用的控制方式为RS232。
4、光源选型经验
一般来说,光源生产商为了销售自家的产品,会在产品手册上标注某光源产品适用的场景,这是从光源到应用场景的一对多的映射。但是从用户角度而言,更需要根据实际应用场景缩小光源的选择范围,所以,我这里给出应用场景到光源的一对多的映射。
通用需求场景:
二维码识别:高角度环形光、同轴光源
损伤和赃物检测:高角度环形光
字符识别:高角度环形光
边缘识别:低角度环形光
金属表面划伤、损伤检测:低角度环形光、低角度漫射无影光源、方形漫射无影光源
高反光表面划伤检测:同轴光源
大面积颜色识别:开孔背光
大面积产品定位:开孔背光
尺寸测量:背光源
具体行业应用场景:
太阳能电池板尺寸测量:导光型背光
芯片、硅片的破损检测、字符检测:同轴光源、环形光源
显示屏缺陷检测:同轴光源
电路板字符识别:同轴光源
电路板焊锡检测:AOI光源
手机类涂胶检测:同轴光源
手机类背表面缺陷检测:线光源
液晶面板灰尘检测:线光源
布匹印花缺陷检测:线光源
O型圈外观检测:低角度环形光
机器人定位抓取:大颗粒条形光源
汽车行业零部件的有无检测:大颗粒条形光源、漫反射条光源
发动机涂胶检测:开孔背光
原文:https://51qudong.com/ji-qi-shi-jue-guang-yuan-jie-shao-ji.html
自动化专业毕业后能做什么,未来发展怎么样? 2022-10-31 15:48
自动化专业,常被称为“万金油”专业。这个词有两方面的含义:
路子广,哪个行业都能去 。许多行业都能和自动化专业扯上关系,所以许多行业都能去!
。许多行业都能和自动化专业扯上关系,所以许多行业都能去! 不够专,没有自身的行业。几乎没有纯粹的自动化行业,所以去哪都不是主要角色。
接下来我作为一个过来人,就给大家介绍下自动化专业应该怎么就业。
在此之前,也先给出个结论,免得大家还没读就觉着心虚:
总体而言,自动化专业的就业很好,有着众多的方向和极好的就业前景。
这里说的毕业后出路包含本科和研究生。如果本科毕业参加工作则指本科出路,如果读研则指研究生出路。两者差别不大。我没有读博,而实验室的博士生大都进了学术圈,我对学术圈不熟,所以不讨论博士生出路。
1 如何分析自身出路
每一个自动化专业的本、
......长按二维码访问原文
电气工程及其自动化考研难么 ? 2022-10-31 15:00
今年的硕士毕业生来回答一下
现在由于yq 等各方面的因素,稳定的体制内工作越来越吃香,电气学子很多毕业后都选择国家电网就业。国网校招的学校就那些,所以能够校招的学校电气考研难度逐年上升,所以这个难是相对的。
如果你是准备进入国网,希望能够回家乡,那么92的牌子就对你尤为重要了(当然原电力部直属那几个学校也包括在里头),校招给的地方一般较好,也能够有灵活的选择(毕竟考试需要等到12月份)。
如果是希望进入一些私企打拼的,这里面就有很多门道了,双非也有不错的选择,当然92也不错,建议跟往届的同学多交流,具体情况具体分析。
如果是豪门贵胄,家境殷实,建议听爹妈的
就酱
......长按二维码访问原文
Teledyne DALSA推出37M和67M机型,扩展了Falcon面扫相机系列--机器视觉网 2022-11-01 10:45:22

2022-11-01 10:45:22 来源: 中国机器视觉网
Teledyne Dalsa很高兴宣布推出搭载Teledyne e2v's Emerald 37M和67M黑白传感器的新款Falcon™4-CLHS M6200和M8200相机。
新款Falcon 4-CLHS机型搭载CLHS接口,提高了相机分辨率、功能多样性和易用性,该接口专为需要高速数据传输的工业成像应用而设计。在部分扫描模式或Multi-Roi模式下,这些机型的帧率可达每秒数千帧,感兴趣区域(ROI)最多可达32个。此外,更新后的固件能够将元数据详情附加到链接至不同光源的每个ROI,在定序程序或循环模式下,新型多ROI或移动ROI可以提供更高的帧率和附加功能。
Teledyne Dalsa高级产品经理Manny Romero表示:“Te
......长按二维码访问原文
路口没车,AI 直接让红灯变绿灯!凌华科技打造有感智慧城市解决方案--机器视觉网 2022-11-01 11:19:10

2022-11-01 11:19:10 来源: 中国机器视觉网
创建智慧城市,AI让生活更便利
交通运输是社会运作的大动脉,不过在人流、车流数量庞大的特定时、地,这条动脉难免会堵塞,AI智能控制灯号则可舒缓此状况,凌华近期试运行的智能交通计划中,就利用AI技术让车辆停等红绿灯的时间减少20%。智能视觉中心资深产品经理许凯翔表示,“AI智能控制灯号是社会大众最有感的智能交通系统之一,这项技术确实可以让路人大幅降低塞车之苦。”凌华科技智能视觉事业中心资深产品经理许凯翔指出。
现在城市的交通灯号,背后都有一套运作多年的系统,系统数据库内则有各县市政府长年累积的人车流信息,交通局透过这些数据评估、设定各路口的号志秒数,并在交通尖峰时段容易壅塞的路段,视状况以人力控制灯号。这套运作模式对城市交通的舒缓确实有
......长按二维码访问原文
今年全球新安装工业机器人将达57万台―新闻频道- 视觉系统设计 2022/10/31 23:16:20
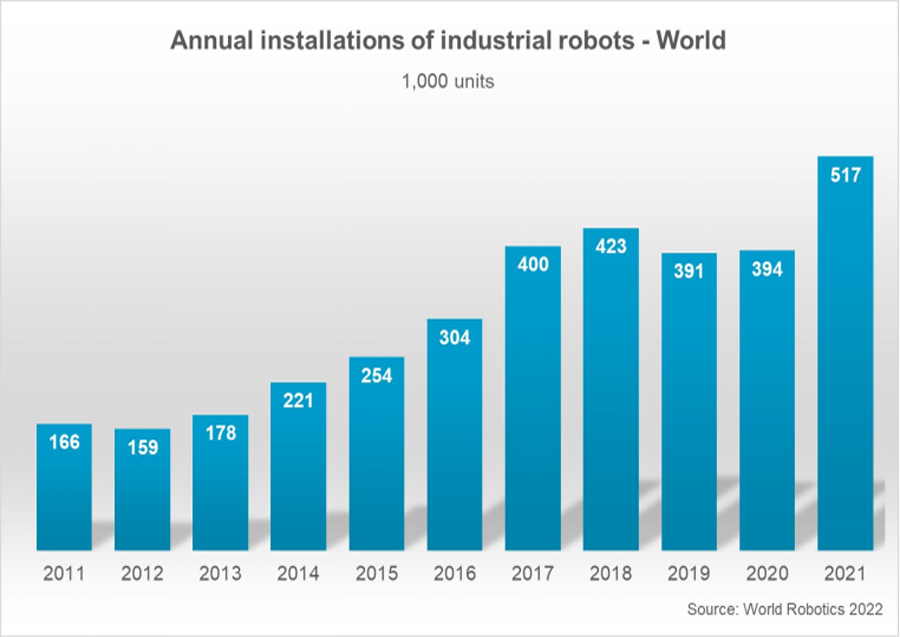
国际机器人联合会IFR发布数据显示,2021年全球工厂安装了工业机器人51.7万台,同比增长31%,创历史新高,近五年年均增长11%,如今,全球可操作机器人的存量在350台左右。
全球工业机器人年装机量 (单位:千台)
2021年新安装的工业机器人,按地域来看:
亚洲
亚洲是全球最大的工业机器人市场,并且市场份额依旧在持续上涨,2021年有74%新部署的工业机器人安装在亚洲,而2020年的比例是70%。
亚洲地区最大的安装国无疑是中国,2021年中国新装工业机器人268195台,同比增长51%,并且首次在全球市场占比超过了50%,如今在中国的工业机器人运营库存已正式突破100 万台大关。
中国(蓝柱)与世界其他国家/地区(红柱)年装机量对比 (单位:千台)
日本继续成为全球第二大工业机器人市场,继
......长按二维码访问原文
Teledyne DALSA推出新款 Falcon面阵相机―产品聚焦频道- 视觉系统设计 2022/10/31 23:19:06
Teledyne Dalsa宣布推出搭载Teledyne e2v's Emerald 37M和67M黑白传感器的新款Falcon™4-CLHS M6200和M8200相机。
新款Falcon 4-CLHS机型搭载CLHS接口,提高了相机分辨率、功能多样性和易用性,该接口专为需要高速数据传输的工业成像应用而设计。在部分扫描模式或Multi-Roi模式下,这些机型的帧率可达每秒数千帧,感兴趣区域(ROI)最多可达32个。
此外,更新后的固件能够将元数据详情附加到链接至不同光源的每个ROI,在定序程序或循环模式下,新型多ROI或移动ROI可以提供更高的帧率和附加功能。
Teledyne Dalsa高级产品经理Manny Romero表示:“Teledyne e2v Emerald 37M和67M CMOS图像传
......长按二维码访问原文
3D ToF视觉企业如何落地工业应用―技术与应用频道- 视觉系统设计 2022/10/31 23:59:28

本文介绍了维感科技3D ToF深度相机如何适配于轻工业领域的自动化设备,在抓取与分拣工序对机械臂进行视觉定位与引导,从而更好地满足品牌厂商订单小批量、多样化的趋势要求。
“在2019年以前,在轻工业厂家的生产车间里,为了让自动化设备可以顺利导入生产,我们会对厂家生产的物品外包装的颜色、尺寸、类别,以及车间条件提出一些建议,譬如外包装不允许出现透明或者黑色包装,产品种类不能过于繁杂,设备车间不能有阳光等。”济南翼菲自动化技术预研部视觉部门产品经理周磊回忆道。
近年来,随着消费者的需求不断变化,小批量、多样式的趋势在轻工业生产过程中越来越明显,以往,轻工业厂家生产一个产品基本上是以年为单位,譬如物品的包装的形态,一年就生产3-5个类别,但现在,产线物品的包装颜色与形态多种多样,变化多端,设备企业要获得生产厂家的
......长按二维码访问原文
3D相机助力膝关节扫描―技术与应用频道- 视觉系统设计 2022/10/31 23:54:54

空洞惨白的骷髅总让人避之唯恐不及,也许只有在万圣节和在医院时才会例外,特别是对于关节病患者们来说,医院中的骷髅——人体骨骼模型,能够让他们更加直观地了解病情,配合治疗,加快身体机能的康复。
除此之外,随着骨关节假体技术的发展和应用,生产商们对于骨关节假体的尺寸和缺陷检测也有了更高要求,而借助机器视觉,能够高效地获得骨关节假体的图像等数据。
检测需求
产品名称:膝关节模型
应用场景:在线/抽样检测
测量项目:轮廓度/平整度
相机参数
型号: SR7240 物距: 240mm
Z轴高度: 40mm 重复精度: 1μm
X轴宽度: 147mm 重复精度: 13μm
X轴精度: 0.05mm 轮廓点数:3200
尺寸: 190×93×48(mm)
深视智能三维激光轮廓测量仪能够以非接触的方式,快
......长按二维码访问原文
抢占机遇,工业机器人大研发时代到来! 2022-11-01 18:06
抢占机遇,工业机器人大研发时代到来!
近期工业机器人相关企业的研发费用在迅速上涨。
维科网机器人梳理二十多家企业财报发现,超过六成的工业机器人企业研发费用都同比上涨,平均幅度超过了20%,这在半年报中体现的更为明显。
工业机器人本体方面,今年上半年,埃斯顿研发投入达到1.84亿元,同比增长36.44%;汇川技术研发费用为10.05亿元,同比增长48%,其中推动新型以及大负载工业机器人的研发占据了重要部分。
机器人零部件方面,绿的谐波、华中数控、秦川机床等研发支出都同比增长超四成;还有机器人集成商的研发费用更是增长迅速,如江苏北人研发费用同比增65.81%,主要是下游应用端对工业机器人的需求在转变,集成商作为链接客户的桥梁,自然也要随之改变。
抢占先进制造应用市场
工信部数据显示,目前我国工业机器人应
......长按二维码访问原文
机器视觉-视觉方案工程师(售前方案) 11-01 7千-1.2万·13薪,广州-番禺区 | 1年经验 | 大专
机器视觉工程师 11-01 8千-1.6万,深圳-龙岗区 | 2年经验 | 本科
机器视觉工程师 11-01 1.5-2.5万,广州 | 2年经验 | 大专
机器视觉工程师 11-01 1-2万,苏州-工业园区 | 2年经验 | 本科
机器视觉软件工程师 11-01 1.2-2万·13薪,广州-番禺区 | 3-4年经验 | 本科
机器视觉工程师 11-01 8千-1.6万,深圳-龙岗区 | 2年经验 | 本科
软件工程师(机器人 视觉 C++) 11-01 9千-1.8万,深圳-宝安区 | 2年经验 | 本科
机器视觉工程师 11-01 1.5-2.5万,深圳-南山区 | 3-4年经验 | 本科
机器视觉-视觉方案工程师(售前方案) 11-01 7千-1.2万·13薪,广州-番禺区 | 1年经验 | 大专
机器视觉算法工程师 11-01 2-4万,上海 | 3-4年经验 | 本科
3D点云机器视觉算法工程师 11-01 1.4-2.8万,深圳-宝安区 | 2年经验 | 本科
机器视觉工程师(技术支持) 11-01 1.5-2.5万·13薪,上海-浦东新区 | 1年经验 | 本科
机器视觉-视觉方案工程师(售前方案) 11-01 7千-1.2万·13薪,广州-番禺区 | 1年经验 | 大专
机器视觉算法工程师 11-01 2-4万,深圳-龙华区 | 3-4年经验 | 本科
机器视觉工程师 11-01 1-2万,无锡-无锡新区 | 3-4年经验 | 本科
机器视觉工程师(技术支持) 11-01 1.5-2.5万·13薪,深圳-福田区 | 1年经验 | 大专
机器视觉工程师 11-01 1.6-2.5万,苏州-吴江区 | 3-4年经验 | 本科
运维经理(机器视觉) 11-01 1.2-2万,淮安 | 5-7年经验 | 本科
机器视觉软件工程师 11-01 8千-1.2万·15薪,杭州-拱墅区 | 1年经验 | 硕士
机器视觉调试工程师 11-01 1.2-1.8万,北京-通州区 | 3-4年经验 | 大专
视觉调试工程师 11-01 1-1.5万,上海-宝山区 | 2年经验 | 大专
机器视觉算法工程师 11-01 1.5-3万,无锡-滨湖区 | 3-4年经验 | 本科
机器视觉工程师 11-01 1-2万·15薪,杭州-拱墅区 | 1年经验 | 硕士
机器视觉调试工程师 11-01 8千-1.5万,重庆-渝北区 | 3-4年经验 | 大专
图像算法工程师/视觉算法工程师/机器视觉工程师 11-01 2-3.5万·14薪,合肥-高新区 | 1年经验 | 硕士
软件开发工程师(机器视觉方向) 11-01 1.5-1.8万·13薪,武汉-东西湖区 | 3-4年经验 | 本科
视觉应用工程师 11-01 1-1.5万,南京-江宁区 | 3-4年经验 | 本科
机器视觉软件工程师 11-01 1.2-1.8万·13薪,上海-浦东新区 | 3-4年经验 | 大专
机器视觉工程师 11-01 0.8-1万,武汉-江汉区 | 8-9年经验 | 大专
机器视觉工程师 11-01 1.5-2.2万·14薪,昆山 | 1年经验 | 本科
机器视觉主管 11-01 2-3万,苏州-吴中区 | 5-7年经验 | 硕士
机器视觉工程师 11-01 1.2-1.8万·13薪,无锡-滨湖区 | 3-4年经验 | 大专
视觉软件工程师 11-01 1.6-2.3万,长沙-浏阳市 | 3-4年经验 | 本科
机器视觉工程师 11-01 1.5-2.2万·14薪,昆山 | 1年经验 | 本科
视觉硬件工程师(广州、杭州) 11-01 1.5-3万·13薪,广州-黄埔区 | 2年经验 | 本科
机器视觉调试工程师 11-01 8千-1.5万,长沙-长沙县 | 3-4年经验 | 大专
机器视觉软件工程师 11-01 1.5-2.5万,深圳-龙华区 | 2年经验 | 本科
机器视觉工程师 11-01 1.5-2.2万·14薪,昆山 | 1年经验 | 本科
机器视觉算法工程师 11-01 1-2万,武汉-东湖新技术产业开发区 | 3-4年经验 | 本科
机器视觉调试工程师 11-01 1-1.8万,南京-江宁区 | 3-4年经验 | 大专
机器视觉销售工程师 11-01 1-1.5万,苏州-吴中区 | 3-4年经验 | 大专
机器视觉工程师 11-01 1.5-2.2万·14薪,昆山 | 1年经验 | 本科
机器视觉应用开发工程师 11-01 2.5-3万·15薪,上海-闵行区 | 3-4年经验 | 本科
机器视觉调试工程师 11-01 8千-1.5万,成都-龙泉驿区 | 3-4年经验 | 大专
机器视觉主管/副经理 11-01 1.5-2.5万,东莞-东城区 | 5-7年经验 | 本科
机器视觉工程师 11-01 1.5-2.2万·14薪,昆山 | 1年经验 | 本科
机器人视觉工程师 11-01 9千-1.8万,泉州-丰泽区 | 1年经验 | 硕士
机器视觉调试工程师 11-01 8千-1.5万,南昌-西湖区 | 2年经验 | 大专
机器视觉工程师 11-01 1.5-2万,东莞-东城区 | 5-7年经验 | 本科
机器视觉工程师 11-01 1.5-2.2万·14薪,昆山 | 1年经验 | 本科
欲了解详情及更多职位,请在公众号后台回复:zp221101

工业盐自动视觉检测设备 11-01 ,缺陷检测,化学化工
塑料件自动和视觉检测设备 11-01 ,缺陷检测,橡塑制品
板材自动化视觉检测设备 11-01 ,尺寸检测,家居建材
scara机械手加视觉抓取 11-01 ,机器人上下料,橡塑制品
欲了解详情,请公众号后台回复:xq221101
004:Facebook 开源计算机视觉系统,从像素水平理解图像(附论文及代码)
009:从洗衣妹到谷歌首席科学家,她靠孤独改变了人工智能界!
019:机器人控制系统相关知识大汇集
020:机器人的工作原理,史上最详细的解析!
021:光源选型知识点
022:这才是机械手,这才是自动化,你那算什么?
023:摄像机和镜头的基础知识
024:物联网产业链全景图(附另13大电子行业全景图,必收藏)
025:日本到底强大到什么地步?让人窒息!看后一夜未眠
026:德国机械用行动惊艳全世界:无敌是多么寂寞
 欢迎转发、留言、点赞、分享,感谢您的支持!
欢迎转发、留言、点赞、分享,感谢您的支持!