低速自动驾驶技术:APA
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达

01 定义
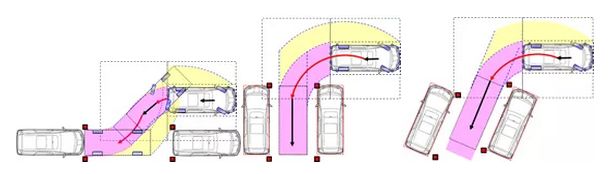

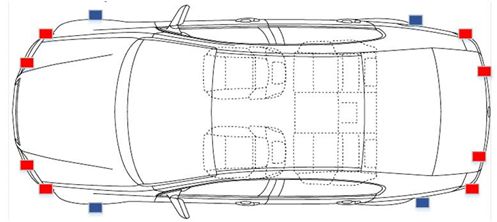
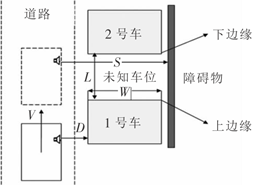
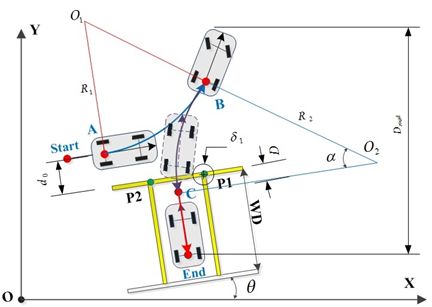
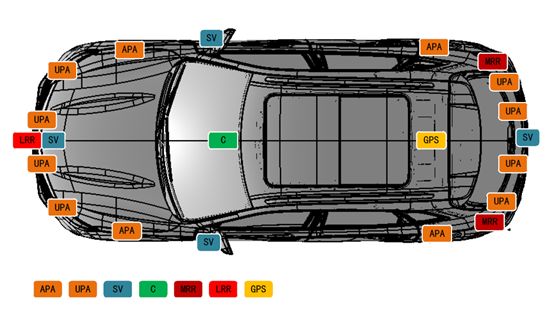
02 原理方案

01 定义
02 原理方案




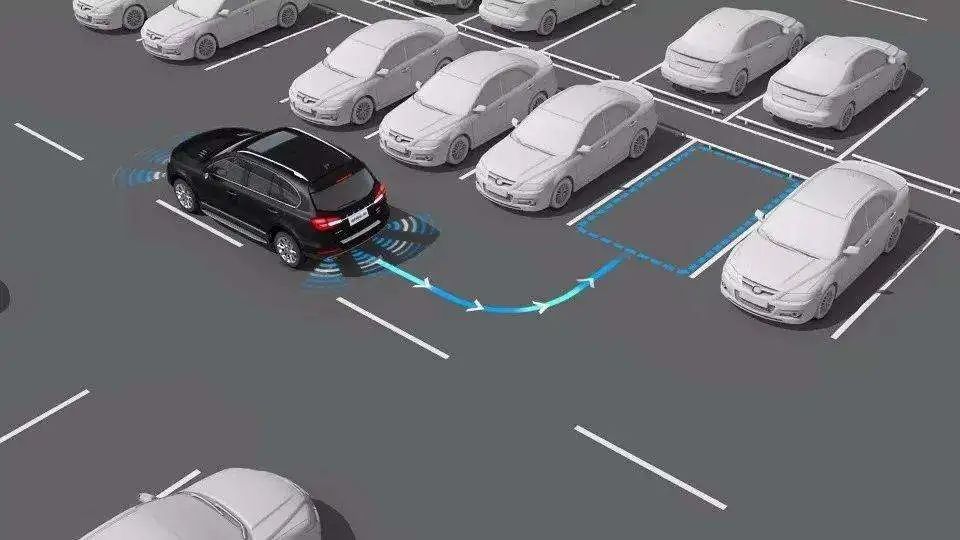
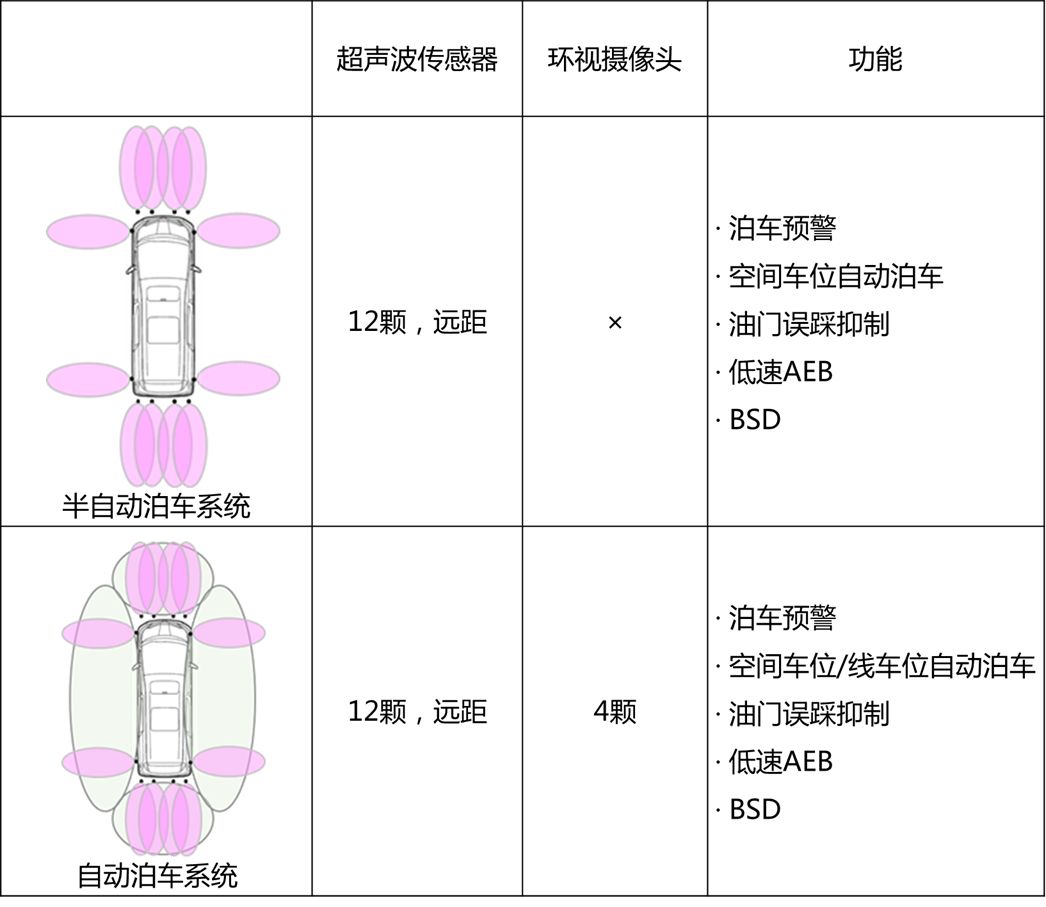
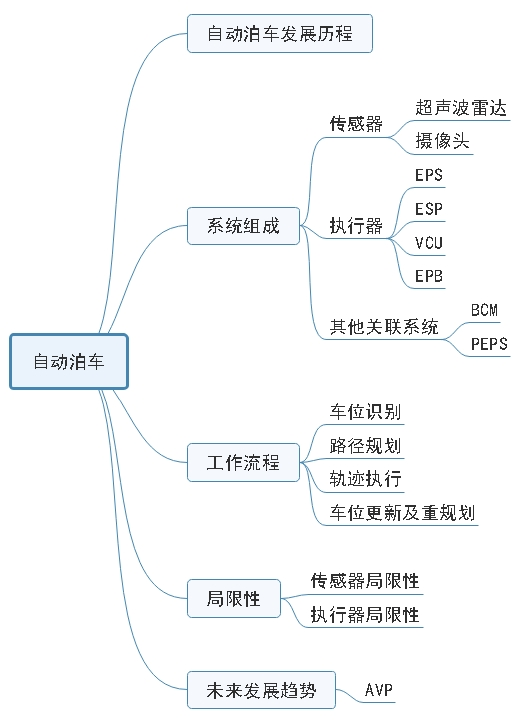
03 自动泊车系统
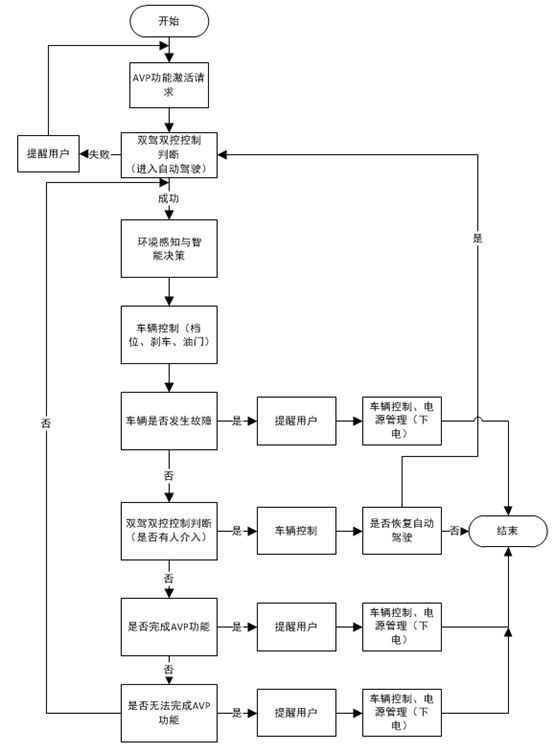
04 自主泊车系统



来源 | 无人驾驶俱乐部
本文仅做学术分享,如有侵权,请联系删文。
评论
 下载APP
下载APP点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
01 定义
02 原理方案
01 定义
02 原理方案
03 自动泊车系统
04 自主泊车系统
来源 | 无人驾驶俱乐部
本文仅做学术分享,如有侵权,请联系删文。