
丢弃Transformer,FCN也可以实现E2E检测
共 5133字,需浏览 11分钟
·
2022-08-25 00:52
重磅干货,第一时间送达

导读
作者基于FCOS,首次在dense prediction上利用全卷积结构做到E2E,受到DETR的启发,设计了一种prediction-aware one-to-one assignment方法 。该方法基本不修改模型结构,不需要更长的训练时间,可以基于现有dense prediction方法平滑过渡。本文主要阐述了方法实现的过程中遇到的问题的解决思路以及相应的实验结果。
介绍一下我和 @Steven Song 一同完成的工作:
End-to-End Object Detection with Fully Convolutional Network
链接:E2ENet (arxiv版已上传)
https://megvii-my.sharepoint.cn/personal/wangjianfeng_megvii_com/_layouts/15/onedrive.aspx
代码:正在准备中,稍后放出
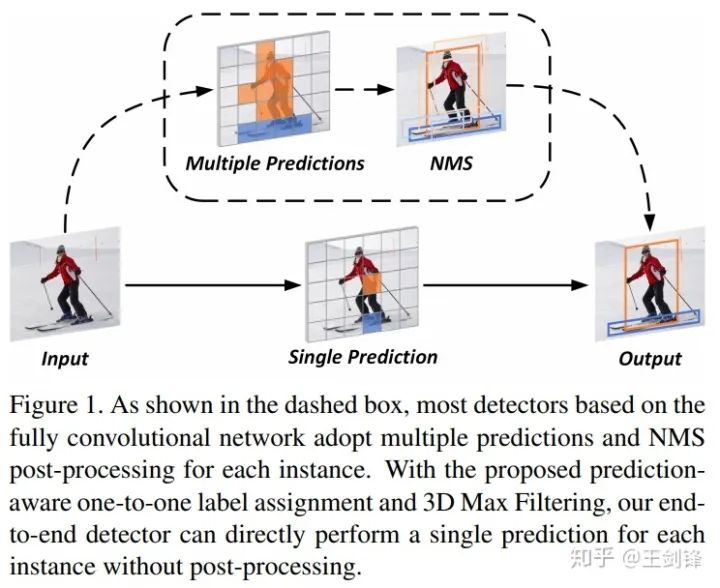
我们基于FCOS,首次在dense prediction上利用全卷积结构做到E2E,即无NMS后处理。我们首先分析了常见的dense prediction方法(如RetinaNet、FCOS、ATSS等),并且认为one-to-many的label assignment是依赖NMS的关键。受到DETR的启发,我们设计了一种prediction-aware one-to-one assignment方法。此外,我们还提出了3D Max Filtering以增强feature在local区域的表征能力,并提出用one-to-many auxiliary loss加速收敛。我们的方法基本不修改模型结构,不需要更长的训练时间,可以基于现有dense prediction方法平滑过渡。我们的方法在无NMS的情况下,在COCO数据集上达到了与有NMS的FCOS相当的性能;在代表了密集场景的CrowdHuman数据集上,我们的方法的recall超越了依赖NMS方法的理论上限。
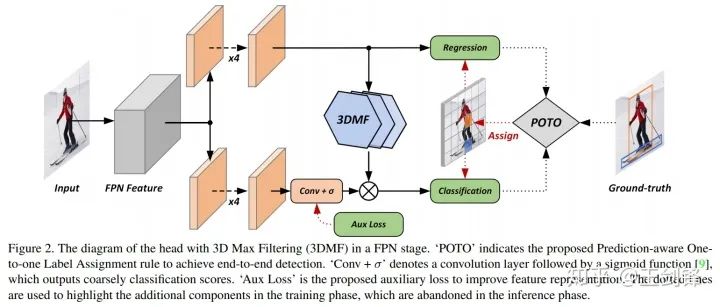
整体方法流程如下图所示:
One-to-many vs. one-to-one
自anchor-free方法出现以来,NMS作为网络中最后一个heuristic环节,一直是实现E2E dense prediction的最大阻碍。但其实我们可以发现,从RPN、SSD、RetinaNet等开始,大家一直遵循着这样一个流程:先对每个目标生成多个预测(one-to-many),再将多个预测去重(many-to-one)。所以,如果不对前一步label assignment动刀,就必须要保留去重的环节,即便去重的方法不是NMS,也会是NMS的替代物(如RelationNet,如CenterNet的max pooling)。
那直接做one-to-one assignment的方法是否存在呢?其实是有的。上古时代有一个方法叫MultiBox(https://arxiv.org/abs/1412.1441),对每个目标和每个预测做了bipartite matching,DETR其实就是将该方法的网络换成了Transformer。此外还有一个大家熟知的方法:YOLO,YOLO也是对每个目标只匹配一个grid[1],只不过它是采用中心点做的匹配,而且有ignore区域。
Prediction-aware one-to-one
于是接下来的问题就是,在dense prediction上我们能不能只依赖one-to-one label assignment,比较完美地去掉NMS?我们首先基于去掉centerness分支的FCOS,统一网络结构和训练方法,用Focal Loss + GIoU Loss,做了如下分析实验:
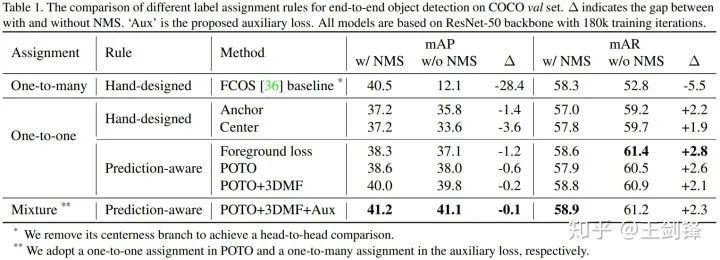
我们设计了两种hand-crafted one-to-one assignment方法,分别模仿RetinaNet(基于anchor box)和FCOS(基于center点),尽可能做最小改动,发现已经可以将有无NMS的mAP差距缩小到4个点以内。
但我们认为手工设计的label assignment规则会较大地影响one-to-one的性能,比方说center规则对于一个偏心的物体就不够友好,而且在这种情况下one-to-one规则会比one-to-many规则的鲁棒性更差。所以我们认为规则应该是prediction-aware的。我们首先尝试了DETR的思路,直接采用loss做bipartite matching的cost[2],发现无论是绝对性能还是有无NMS的差距,都得到了进一步的优化。
但我们知道,loss和metrics往往并不一致,它常常要为优化问题做一些妥协(比如做一些加权等等)。也就是说,loss并不一定是bipartite matching的最佳cost。因而我们提出了一个非常简单的cost:
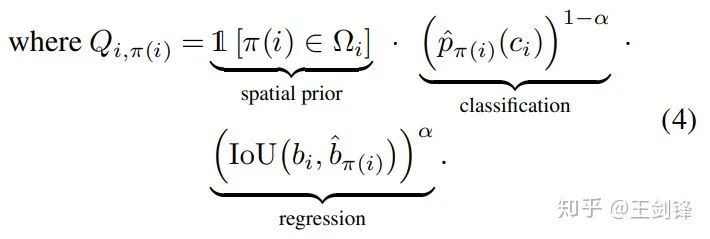
看起来稍微有点复杂,但其实就是用网络输出的prob代表分类,网络输出和gt的IoU代表回归,做了加权几何平均,再加一个类似于inside gt box的空间先验。加权几何平均和空间先验我们后面都分别做了ablation。
这就是我们提出的POTO策略,它进一步地提升了无NMS下的性能,也侧面验证了loss并不一定是最好的cost[3]。但从Table 1中我们也发现了,POTO的性能依旧不能匹敌one-to-many+NMS组合。我们认为问题出在两个方面:
one-to-one需要网络输出的feature非常sharp,这对CNN提出了较严苛的要求(这也是Transformer的优势); one-to-many带来了更强的监督和更快的收敛速度。
我们分别用3D Max Filtering和one-to-many auxiliary loss缓解如上问题。
3D Max Filtering
针对第一点,我们提出了3D Max Filtering,这基于一个intuition(paper中没有提到):卷积是线性滤波器,学习max操作是比较困难的。此外,我们在FCOS做了实验,发现duplicated prediction基本来自于5x5的邻域内,所以最简单的做法就是在网络中嵌入最常见的非线性滤波器max pooling。另外,NMS是所有feature map一起做的,但网络在结构上缺少层间的抑制,所以我们希望max pooling是跨层的。
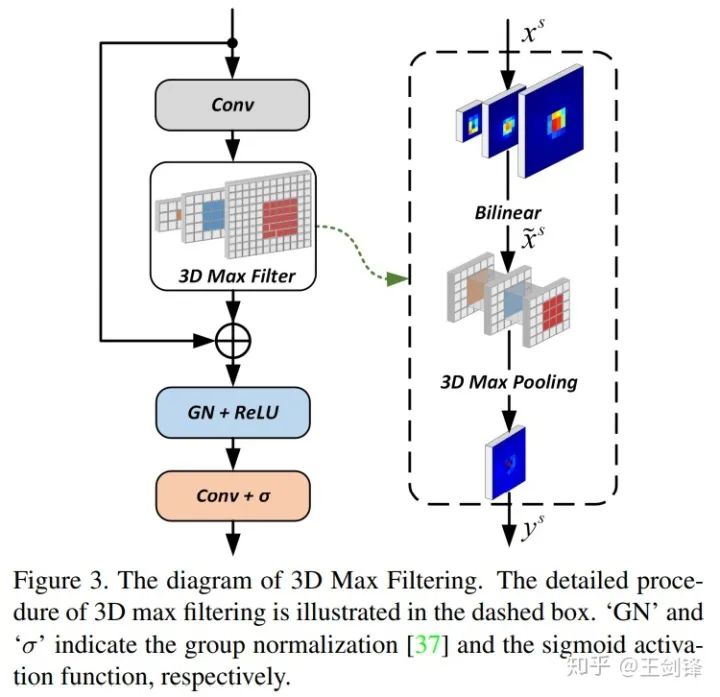
如Figure 3所示,这个模块只采用了卷积、插值、max pooling 3d,速度非常快,也不需要写cuda kernel。
One-to-many auxiliary loss
针对第二点监督不够强、收敛速度慢,我们依旧采用one-to-many assignment设计了auxiliary loss做监督,该loss只包含分类loss,没有回归loss。assignment本身没什么可说的,appendix的实验也表明多种做法都可以work。这里想提醒大家的是注意看Figure 2的乘法,它是auxiliary loss可以work的关键。在乘法前的一路加上one-to-many auxiliary loss,乘法后是one-to-one的常规loss。由于1*0=0,1*1=1,我们只需要大致保证one-to-one assignment的正样本在one-to-many中依然是正样本即可。
实验
最主要的实验结果已经在Table 1中呈现了,此外还有一些ablation实验。
这里highlight几点:
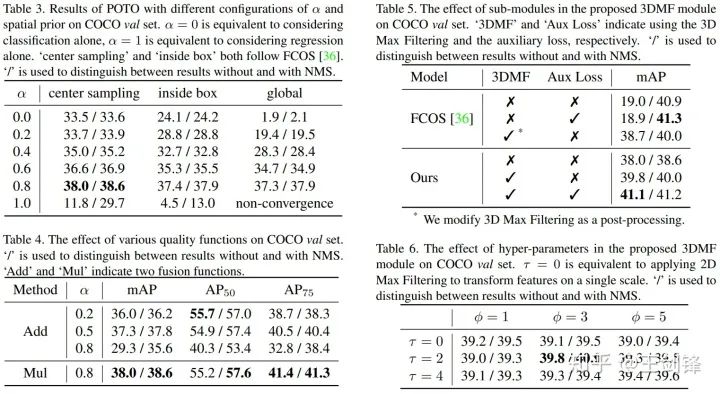
α越低,分类权重越大,有无NMS的差距越小,但绝对性能也会降低[4];α太高也不好,我们后续所有实验用α=0.8; 在α合理的情况下,空间先验不是必须的,但空间先验能够在匹配过程中帮助排除不好的区域,提升绝对性能;我们在COCO实验中采用center sampling radius=1.5,在CrowdHuman实验中采用inside gt box; 加权几何平均数(Mul)[5]比加权算术平均数(Add)[6]更好。
去掉NMS的最大收益其实是crowd场景,这在COCO上并不能很好地体现出来。所以我们又在CrowdHuman上做了实验如下:
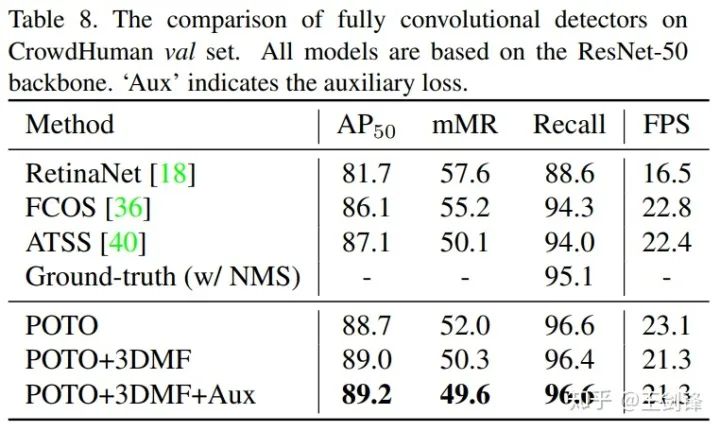
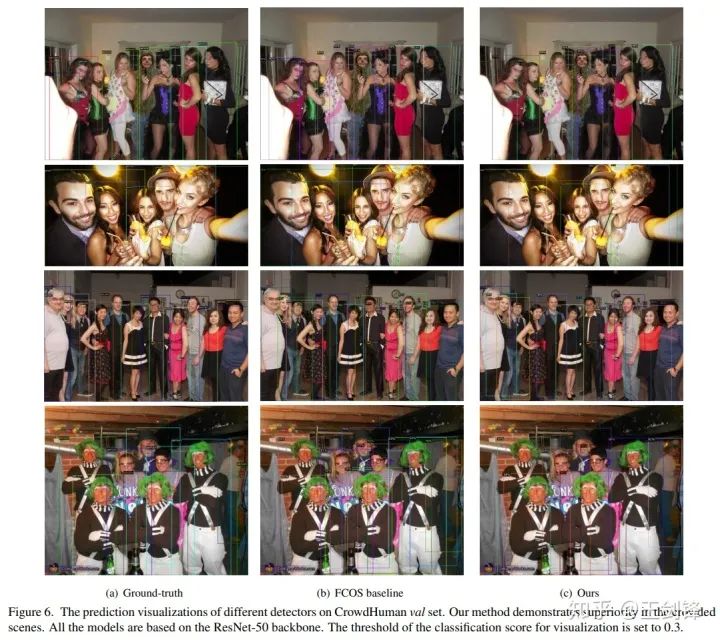
请注意CrowdHuman的ground-truth做NMS threshold=0.6,只有95.1%的Recall,这也是NMS方法的理论上限。而我们的方法没有采用NMS,于是轻易超越了这一上限。
我们还做了其它一些实验和分析,欢迎看原文。
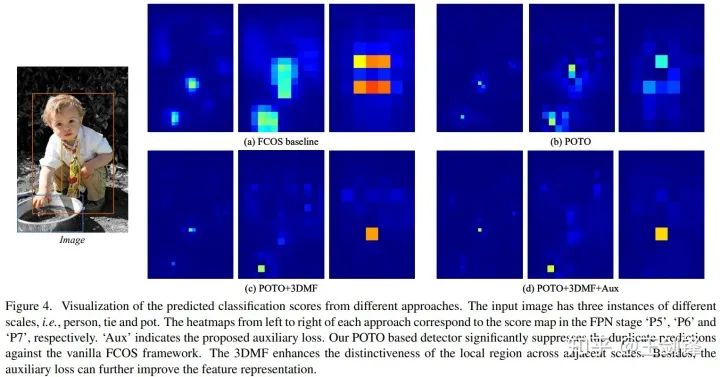
可视化
经过以上方法,我们成功把one-to-one的性能提升到了与one-to-many+NMS方法comparable的水平。我们可视化了score map,可以发现FCN是有能力学出非常sharp的表示的,这也是很让我们惊奇的一点。
Others
有些人可能比较关心训练时间,因为潜意识里在dense prediction上做bipartite matching应该是很慢的。然而实际上依赖于scipy对linear_sum_assignment(https://docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.linear_sum_assignment.html)的优化,实际训练时间仅仅下降了10%左右。
如果对这一时间依然敏感,可以用topk(k=1)代替bipartite matching;在dense prediction里top1实际上是bipartite matching的近似解[7]。相似地,k>1的情况对应了one-to-many的一种新做法,我们组也对此基于最优传输做了一些工作,后续可能会放出来。
Relation to @孙培泽 's work
@孙培泽 最近放出了该文章:
孙培泽:OneNet: End-to-End One-Stage Object Detectionzhuanlan
https://zhuanlan.zhihu.com/p/331590601
他们的工作和我们是非常相似的,我们在DETR之后各自独立地意识到了Transformer不是E2E的必要条件,one-to-one matching才是必要条件。不过我们还发现one-to-one是不够的,必须prediction-aware,把必要条件变成了充要条件,且用loss做cost不一定是更好的。
他们采用的min cost匹配,其实就是上文提到的top1,即bipartite matching的近似解。他们也得出了和我们Table 3类似的结论,即分类cost权重越大,去除NMS的效果越好。不过我们还从feature和监督两个角度提升性能的方法,最后首次实现了与one-to-many+NMS方法comparable的性能,并在CrowdHuman上证明了在工业界大规模应用的潜力。
参考
^如果有人感兴趣的话,可以在YOLO上去掉NMS尝试一下,可以接近30mAP。 ^注意我们这里没有使用DETR的CE+GIoU+L1组合,而是直接采用loss本身(Focal+GIoU)。我们认为这样更符合DETR用loss做cost的原意。 ^其实这里可以有一个脑洞留给大家,因为cost是不需要求导的,所以甚至是可以直接算AP当cost的。 ^侧面印证了分类和回归的冲突在检测任务上是显著的。 ^事实上加权几何平均数的负对数就是CE+IoU Loss,加权算术平均数则没有明显的物理含义。 ^NoisyAnchor在assign中采用了类似的公式,只不过采用的是anchor IoU。 ^更具体来讲,top1是Hugarian Algorithm只做第一次迭代的结果;由于在dense prediction下冲突会很少,一次迭代就已经逼近了最优匹配,这也是为什么Hungarian Algorithm这里实际运行很快。
推荐阅读
关于程序员大白
程序员大白是一群哈工大,东北大学,西湖大学和上海交通大学的硕士博士运营维护的号,大家乐于分享高质量文章,喜欢总结知识,欢迎关注[程序员大白],大家一起学习进步!