
3D视觉坐标系与坐标转换
1、相机成像坐标
• 相机坐标系Oc
• 成像平面坐标系Oo
• 图像坐标系Op
• 世界坐标系Ow
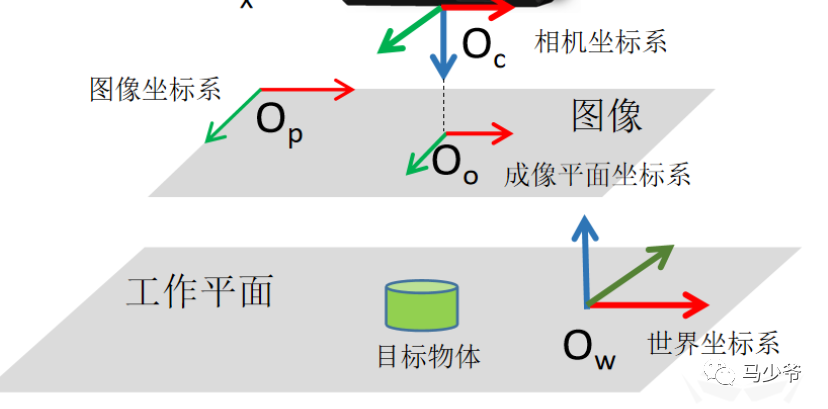
图1 相机坐标系系统
• 相机坐标系Oc 是以相机光心为中心的坐标系,其中相机的光轴为z 轴。
• 成像平面坐标系Oo 是指在相机内用于成像的平面坐标系。成像平面与相机坐标系的xy 平面平行,其原点是相机光轴与成像平面的交点。
• 图像坐标系Op 是指在计算机内部描述数字图像所用的坐标系。图像坐标系与成像平面坐标系在同一平面上,图像坐标系包括图像物理坐标系(以毫米等为单位) 和图像像素坐标系(以像素为单位)。
• 世界坐标系Ow 是客观世界的绝对坐标系,用于描述物体在真实三维空间的位置。
2、相机内参
相机内部参数(简称内参)只与相机内部属性(如焦距、分辨率、像素尺寸、镜头畸变等)有关。利用相机内参可以将相机坐标系中的三维空间点变换到成像平面坐标系中,之后经过镜头畸变等校正过程之后可进一步变换至图像像素坐标系中的二维像素点。因此图像像素坐标系下的投影点和相机坐标系下的三
维空间点之间存在着一种映射关系,求取这一关系的过程称为相机内参标定。
相机可以通过使用棋盘格标定板来标定相机内参。只有在相机具有准确的内参时,该相机采集的图像和位于相机坐标系下的三维空间物体坐标之间才能构成正确的对应关系。
3、相机外参
相机坐标系与世界坐标系之间的坐标转换关系称为相机外参,一般由平移和旋转两部分参数组成。求取外参的过程称之为外参标定,外参标定的结果关系到如何引导机器人进行抓取。
相机外参标定又称为机器人的手眼标定,指求解相机坐标系与机器人基坐标系之间的变换关系。(通常机器人基坐标与世界坐标系重合)相机相对于机器人的架设方式通常有两种,分为Eye to Hand(简称ETH)和Eye in Hand(简称EIH)两种,如图2与3所示。ETH 方式求解的是相机坐标系与机器人基坐标系之间的变换关系;EIH 方式求解的是相机坐标系与机器人末端之间的坐标变换关系。这两种情况下的手眼标定原理与流程略有不同。通过圆点式标定板可以标定外参。
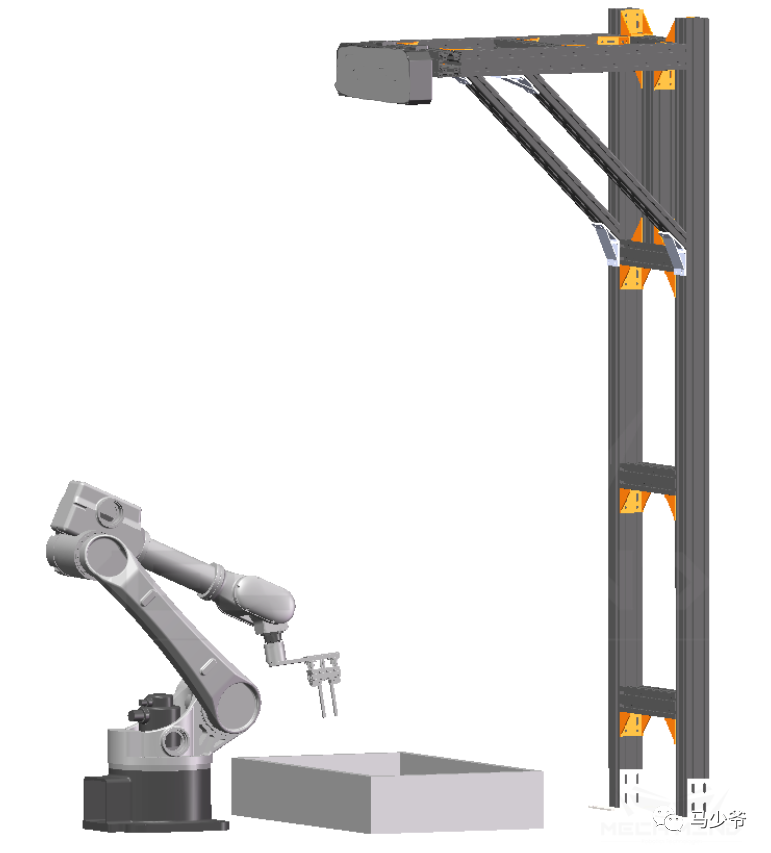
图2 Eye to Hand

图3 Eye in Hand
外参标定可以参考:
4、坐标转换流程
从相机拍照得到图像,到识别物体引导机器人抓取,其中涉及多组坐标系之间的关系转换。具体过程,如下图4所示:
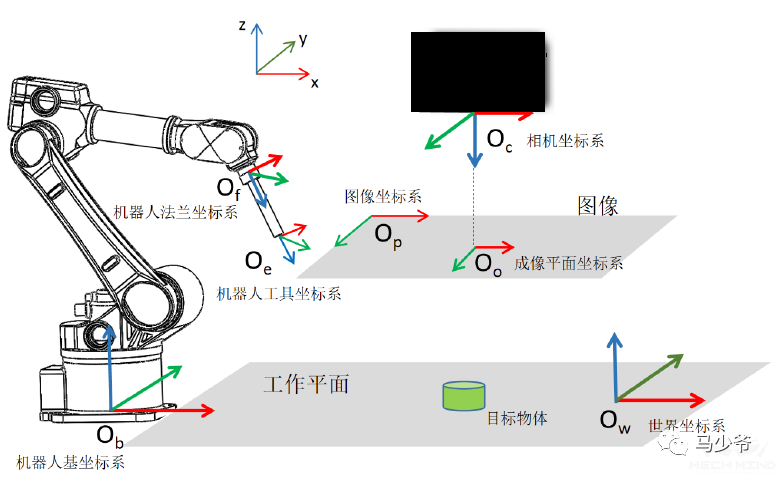
图4 坐标转换流程
(1)相机对工作平面上的目标物体进行拍照获得图像;
(2)通过相机内参建立相机坐标系下的三维空间点与图像像素坐标系下对应点之间的映射关系;通过相机外参将相机坐标系下的三维空间点转换到世界坐标系下表示;
(3)根据(2)中涉及到的内参与外参,可以构建图像像素坐标系下的像素点与世界坐标系下的三维空间点之间的映射关系;
(4)根据图像处理算法求出图像上的目标点,经过(3)中的坐标转换关系得出基于世界坐标系下的三维空间目标点;
(5)在世界坐标系下的机器人(一般世界坐标系与机器人基坐标系重合)即可实现抓取。
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
