
你不知道的车牌识别系统
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

有小伙伴后台和小白说,能不能推荐几个适合入门的开源视觉项目,因为根据实际项目和代码学起来相对来说比较快。小白收集了一些比较简单的开源的项目,会陆陆续续的分享给大家,文末有源码地址。
今天首先带来的是一个车牌识别系统EasyPR。为什么推荐它呢,有两个原因:1,车牌识别已经做的比较成熟了,相对来说是一个比较简单的项目了。2,这个项目是国内团队写的,里面的说明文档全部都是中文,这对很多看英文头疼的小伙伴来说是再好不过的了。
项 目 简 介
EasyPR是一个中文的开源车牌识别系统,其目标是成为一个简单、高效、准确的车牌识别引擎。相比于其他的车牌识别系统,EasyPR有如下特点:
它基于openCV这个开源库。这意味着你可以获取全部源代码,并且移植到java等平台。
它能够识别中文。例如车牌为苏EUK722的图片,它可以准确地输出std:string类型的"苏EUK722"的结果。
它的识别率较高。图片清晰情况下,车牌检测与字符识别可以达80%以上的精度。
项 目 效 果
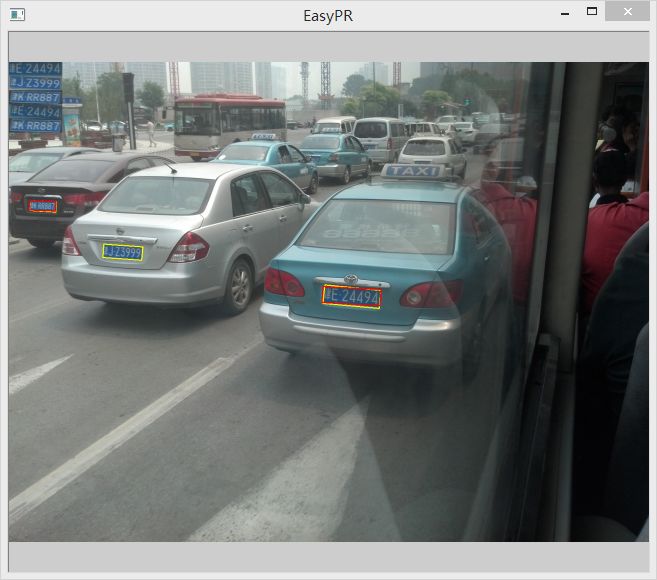
假设我们有如下的原始图片,需要识别出中间的车牌字符与颜色:

经过EasyPR的第一步处理车牌检测(PlateDetect)以后,我们获得了原始图片中仅包含车牌的图块:
接着,我们对图块进行OCR过程,在EasyPR中,叫做字符识别(CharsRecognize)。我们得到了一个包含车牌颜色与字符的字符串:“蓝牌:苏EUK722”
这个识别是不是很神奇。什么?小伙伴觉得还不过瘾,讲解的还不够详细,那接下来再接一个示例好了,这回有图有程序。
代 码 示 例
EasyPR的调用非常简单,下面是一段示例代码:
CPlateRecognizepr;
pr.setResultShow(false);
pr.setDetectType(PR_DETECT_CMSER);
vector<CPlate>plateVec;
Matsrc = imread(filepath);
int result =pr.plateRecognize(src, plateVec);
我们首先创建一个CPlateRecognize的对象pr,接着设置pr的属性。
pr.setResultShow(false);这句话设置EasyPR是否打开结果展示窗口,如下图。设置为true就是打开,否则就是关闭。在需要观看定位结果时,建议打开,快速运行时关闭。
pr.setDetectType(PR_DETECT_CMSER);这句话设置EasyPR采用的车牌定位算法。CMER代表文字定位方法,SOBEL和COLOR分别代表边缘和颜色定位方法。可以通过"|"符号结合。
pr.setDetectType(PR_DETECT_COLOR| PR_DETECT_SOBEL);除此之外,还可以有一些其他的属性值设置:
pr.setLifemode(true);这句话设置开启生活模式,这个属性在定位方法为SOBEL时可以发挥作用,能增大搜索范围,提高鲁棒性。
pr.setMaxPlates(4);这句话设置EasyPR最多查找多少个车牌。当一副图中有大于n个车牌时,EasyPR最终只会输出可能性最高的n个。
下面来看pr的方法。plateRecognize()这个方法有两个参数,第一个代表输入图像,第二个代表输出的车牌CPlate集合。
vector<CPlate>plateVec;
Matsrc = imread(filepath);
int result =pr.plateRecognize(src, plateVec);当返回结果result为0时,代表识别成功,否则失败。CPlate类包含了车牌的各种信息,其中重要的如下:
CPlateplate = plateVec.at(i);
MatplateMat = plate.getPlateMat();
RotatedRectrrect = plate.getPlatePos();
stringlicense = plate.getPlateStr();plateMat代表车牌图像,rrect代表车牌的可旋转矩形位置,license
代表车牌字符串,例如“蓝牌:苏EUK722”。
这里说下如何去阅读如下图的识别结果。
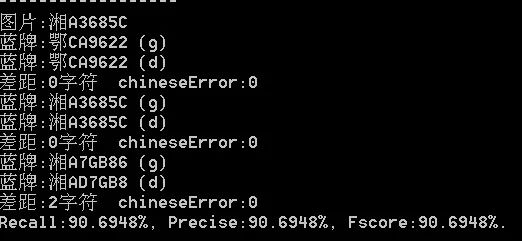
第1行代表的是图片的文件名。
第2行代表GroundTruth车牌,用后缀(g)表示。
第3行代表EasyPR检测车牌,用后缀(d)表示。两者形成一个配对
第4行代表两者的字符差距。下面同上。本图片中有3个车牌,所有共有三个配对。
最后的Recall等指标代表的是整幅图片的定位评价,考虑了三个配对的结果。有时检测车牌的部分会用“无车牌”与“No string”替代。“无车牌”代表“定位不成功”,“No string”代表“定位成功但字符分割失败”。
如果小伙伴想了解更多的关于项目的内容,可以通过下载代码,阅读里面的说明文档,也可以在自己的电脑上跑一下该程序。
源码地址:https://gitee.com/easypr/EasyPR
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~