
你真的读懂yolo了吗?
作者: stone,就职于百度,计算机视觉
来源:https://zhuanlan.zhihu.com/p/37850811
yolo v1(以下都称为yolo)算比较旧的算法了,不过近来想整理一下yolo系列算法,所以先从yolo开始整理。发现网上关于yolo的文章基本都是照着原文翻译,很多背后的原理没有讲清楚,所以本文尽量用最通俗易懂的语言来解释yolo。如果有理解不对的地方,欢迎指正。
一、yolo思想
废话不多说,直接开始讲yolo算法的思想。首先从最初的目标检测开始讲起。
1. 从目标检测讲起
首先假设深度学习还没用于目标检测,我们还不知道那么多目标检测算法。

我们先看一下目标检测要做什么事情。目标检测就是要找出图片中物体的bounding box(边界框),并判定框内物体的类别。比如上图中有一只猫,那我们要将这只猫用一个bounding box框出来(bounding box可以用左上角坐标(x,y)和矩形的宽高(w,h)来表示)。
对于这种任务我们要怎么做?一个很自然的想法就是,我把图片喂给深度模型,让网络学习吐出bounding box的xywh四个值以及图片的类别就好了。这么做貌似是可以的,但考虑这么一种情况:如果图片上除了一只猫之外还有一只狗,甚至更多的物体,我们都想把它们框出来,那么这时候网络就不仅仅要输出猫的预测,还有输出其他物体的预测。这个时候我们发现,模型的输出的维度是没办法固定的,图片中存在的物体越多,模型输出的维度就越大。所以这种思路行不通。
2. yolo的思想
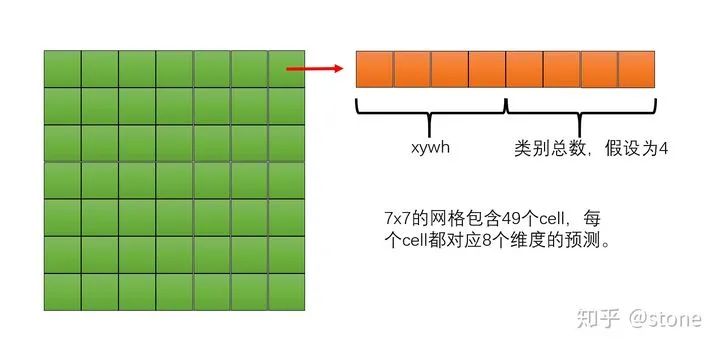
既然模型的输出需要固定维度的,那么我们能不能设计一个固定维度大小的输出,并且输出的维度足够大,足以囊括图像中的所有物体呢?答案是可以的!yolo就是这么做的。yolo固定维度的办法是把模型的输出划分成网格形状,每个网格中的cell(格子)都可以输出物体的类别和bounding box的坐标,如下图所示(yolo实际上还可以预测多个bounding box的类别和confidence,这里只讲思想,所以可以先忽略这个,后面会详细讲到)。
但问题的关键是,我们怎么知道cell需要预测图片中的哪个物体呢?这个其实取决于你怎么去设置模型的训练目标,说白一点就是,你要教它去预测哪个物体。具体来说,yolo是这么做的:
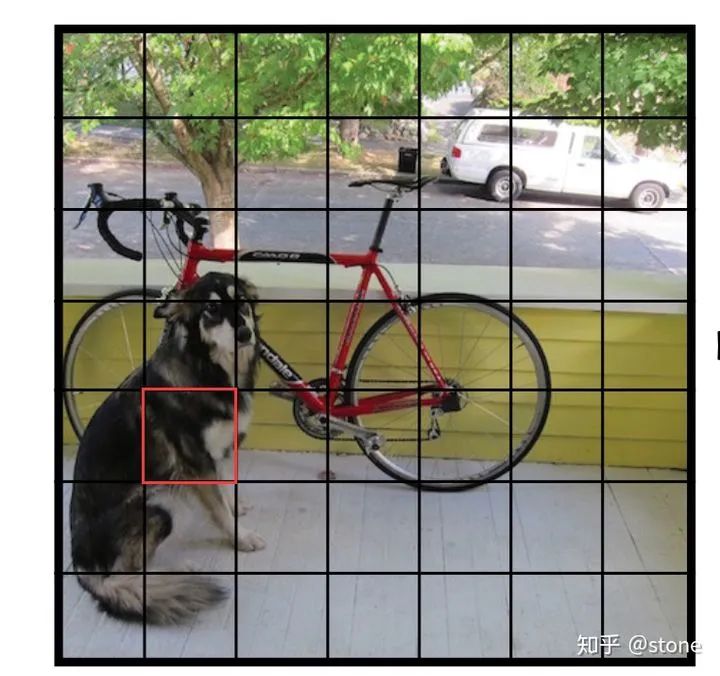
将输入图像按照模型的输出网格(比如7x7大小)进行划分,划分之后就有很多小cell了。我们再看图片中物体的中心是落在哪个cell里面,落在哪个cell哪个cell就负责预测这个物体。比如下图中,狗的中心落在了红色cell内,则这个cell负责预测狗。这么说可能不太容易理解,下面进行更具体的介绍。
实际上,“物体落在哪个cell,哪个cell就负责预测这个物体” 要分两个阶段来看,包括训练和测试。
训练阶段。在训练阶段,如果物体中心落在这个cell,那么就给这个cell打上这个物体的label(包括xywh和类别)。也就是说我们是通过这种方式来设置训练的label的。换言之,我们在训练阶段,就教会cell要预测图像中的哪个物体。
测试阶段。因为你在训练阶段已经教会了cell去预测中心落在该cell中的物体,那么cell自然也会这么做。
以上就是yolo最核心的思想。不过原文都是按照测试阶段来解说的,不容易让人理解。其实,知道训练阶段的意义更重要,因为训练阶段你告诉网络去预测什么,然后测试阶段才能按照你训练阶段教它的去做,如果你只知道测试阶段网络输出的意义,你就很可能会问:凭什么物体的中心落在这个cell它就负责预测这个物体?
二、模型
讲完了思想,我们来讲具体的流程。
1.模型架构
首先讲网络架构。网络架构没什么好讲的,直接看图就好了。

从图中可以看到,yolo网络的输出的网格是7x7大小的,另外,输出的channel数目为30。一个cell内,前20个元素是类别概率值,然后2个元素是边界框confidence,最后8个元素是边界框的 (x, y,w,h) 。

也就是说,每个cell有两个predictor,每个predictor分别预测一个bounding box的xywh和相应的confidence。但分类部分的预测却是共享的。正因为这个,同个cell是没办法预测多个目标的。
现在考虑两个问题:
假设类别预测不是共享的,cell中两个predictor都有各自的类别预测,这样能否在一个cell中预测两个目标?
为什么要预测两个bounding box?
对于第一个问题,答案是否定的。如果一个cell要预测两个目标,那么这两个predictor要怎么分工预测这两个目标?谁负责谁?不知道,所以没办法预测。而像faster rcnn这类算法,可以根据anchor与ground truth的IOU大小来安排anchor负责预测哪个物体,所以后来yolo2也采用了anchor思想,同个cell才能预测多个目标。
对于第二个问题,既然我们一个cell只能预测一个目标,为什么还要预测两个bounding box(或者更多)?这个还是要从训练阶段怎么给两个predictor安排训练目标来说。在训练的时候会在线地计算每个predictor预测的bounding box和ground truth的IOU,计算出来的IOU大的那个predictor,就会负责预测这个物体,另外一个则不预测。这么做有什么好处?我的理解是,这样做的话,实际上有两个predictor来一起进行预测,然后网络会在线选择预测得好的那个predictor(也就是IOU大)来进行预测。通俗一点说,就是我找一堆人来并行地干一件事,然后我选干的最好的那个。
2.模型输出的意义
Confidence预测
首先看cell预测的bounding box中condifence这个维度。confidence表示:cell预测的bounding box包含一个物体的置信度有多高并且该bounding box预测准确度有多大,用公式表示为:  。这个也要分两个阶段来考虑。
。这个也要分两个阶段来考虑。
对于训练阶段来说,我们要给每个bounding box的confidence打label,那么这个label怎么算? 其实很简单,如果一个物体中心没有落在cell之内,那么每个bounding box的
 ,IOU就没有算的必要了,因为
,IOU就没有算的必要了,因为  肯定等于0,因此confidence的label就直接设置为0。如果物体的中心落在了这个cell之内,这个时候
肯定等于0,因此confidence的label就直接设置为0。如果物体的中心落在了这个cell之内,这个时候  ,因此confidence变成了
,因此confidence变成了  。注意这个IOU是在训练过程中不断计算出来的,网络在训练过程中预测的bounding box每次都不一样,所以和ground truth计算出来的IOU每次也会不一样。
。注意这个IOU是在训练过程中不断计算出来的,网络在训练过程中预测的bounding box每次都不一样,所以和ground truth计算出来的IOU每次也会不一样。对于预测阶段,网络只输出一个confidence值,它实际上隐含地包含了
 。
。
对于第2点,有人私信问说,在测试阶段,输出的confidece怎么算?还是通过计算吗?可是如果这样的话,测试阶段根本没有ground truth,那怎么计算IOU?
实际上,在测试阶段,网络只是输出了confidece这个值,但它已经包含了,并不需要分别计算Pr(object)和IOU(也没办法算)。为什么?因为你在训练阶段你给confidence打label的时候,给的是
这个值,你在测试的时候,网络吐出来的也就是这个值。
Bounding box预测
bounding box的预测包括xywh四个值。xy表示bounding box的中心相对于cell左上角坐标偏移,宽高则是相对于整张图片的宽高进行归一化的。偏移的计算方法如下图所示。

xywh为什么要这么表示呢?实际上经过这么表示之后,xywh都归一化了,它们的值都是在0-1之间。我们通常做回归问题的时候都会将输出进行归一化,否则可能导致各个输出维度的取值范围差别很大,进而导致训练的时候,网络更关注数值大的维度。因为数值大的维度,算loss相应会比较大,为了让这个loss减小,那么网络就会尽量学习让这个维度loss变小,最终导致区别对待。
类别预测
除此之外,还有一个物体类别,物体类别是一个条件概率  。这个怎么理解?也可以分两个阶段来看。
。这个怎么理解?也可以分两个阶段来看。
对于训练阶段,也就是打label阶段,怎么打label呢?对于一个cell,如果物体的中心落在了这个cell,那么我们给它打上这个物体的类别label,并设置概率为1。换句话说,这个概率是存在一个条件的,这个条件就是cell存在物体。
对于测试阶段来说,网络直接输出
 ,就已经可以代表有物体存在的条件下类别概率。但是在测试阶段,作者还把这个概率乘上了confidence。
,就已经可以代表有物体存在的条件下类别概率。但是在测试阶段,作者还把这个概率乘上了confidence。
论文中的公式是这样的:

也就是说我们预测的条件概率还要乘以confidence。为什么这么做呢?举个例子,对于某个cell来说,在预测阶段,即使这个cell不存在物体(即confidence的值为0),也存在一种可能:输出的条件概率  ,但将confidence和
,但将confidence和  乘起来就变成0了。这个是很合理的,因为你得确保cell中有物体(即confidence大),你算类别概率才有意义。
乘起来就变成0了。这个是很合理的,因为你得确保cell中有物体(即confidence大),你算类别概率才有意义。
三、训练
最后要讲的是训练阶段的loss。
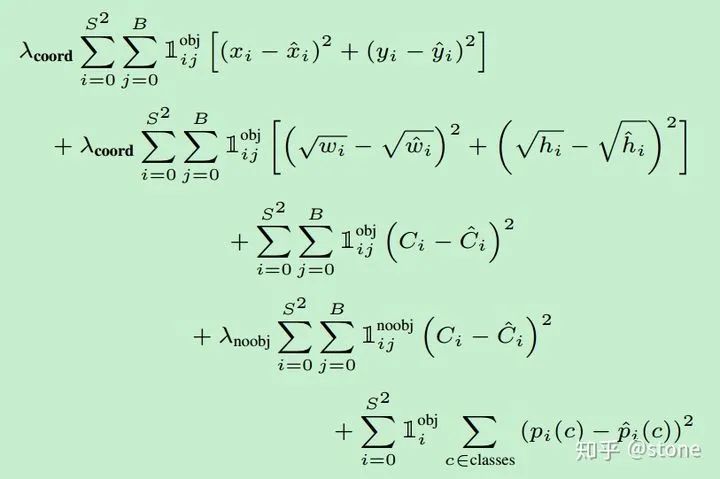
关于loss,需要特别注意的是需要计算loss的部分。并不是网络的输出都算loss,具体地说:
有物体中心落入的cell,需要计算分类loss,两个predictor都要计算confidence loss,预测的bounding box与ground truth IOU比较大的那个predictor需要计算xywh loss。
特别注意:没有物体中心落入的cell,只需要计算confidence loss。
另外,我们发现每一项loss的计算都是L2 loss,即使是分类问题也是。所以说yolo是把分类问题转为了回归问题。
——The End——
求分享 求点赞 求在看!!!