
ROS 机器人技术 - 广播与接收 TF 变换

登龙
这是我的第 139 篇原创
上次我们学习了 TF 的基本概念和如何发布静态的 TF 坐标:
这次来总结下如何发布一个自定义的 TF 坐标转换,并监听这个变换。
一、编写 TF 广播者
进入上次创建的 learning_tf2 包中:
roscd learning_tf2
在 src 下新建一个 turtle_tf2_broadcaster.cpp 文件,代码如下:
#include
// 存储要发布的坐标变换
#include
// 四元数
#include
// 变换广播者
#include
// 乌龟的位姿定义
#include
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建 tf 广播对象
static tf2_ros::TransformBroadcaster br;
// 存储要发布的坐标变换消息
geometry_msgs::TransformStamped transformStamped;
// 变换的时间戳
transformStamped.header.stamp = ros::Time::now();
// 父坐标系名称
transformStamped.header.frame_id = "world";
// 当前要发布的坐标系名称 - 乌龟的名字
transformStamped.child_frame_id = turtle_name;
// 乌龟在二维平面运动,所以 z 坐标高度为 0
transformStamped.transform.translation.x = msg->x;
transformStamped.transform.translation.y = msg->y;
transformStamped.transform.translation.z = 0.0;
// 用四元数存储乌龟的旋转角
tf2::Quaternion q;
// 因为乌龟在二维平面运动,只能绕 z 轴旋转,所以 x,y 轴的旋转量为 0
q.setRPY(0, 0, msg->theta);
// 把四元数拷贝到要发布的坐标变换中
transformStamped.transform.rotation.x = q.x();
transformStamped.transform.rotation.y = q.y();
transformStamped.transform.rotation.z = q.z();
transformStamped.transform.rotation.w = q.w();
// 用 tf 广播者把订阅的乌龟位姿发布到 tf 中
br.sendTransform(transformStamped);
}
int main(int argc, char** argv)
{
// 当前节点的名称
ros::init(argc, argv, "my_tf2_broadcaster");
ros::NodeHandle private_node("~");
// 判断当前要广播的乌龟节点名字
if (!private_node.hasParam("turtle")) {
// launch 文件和命令行都没有传递乌龟名称,就直接退出
if (argc != 2) {
ROS_ERROR("need turtle name as argument");
return -1;
};
// launch 文件中如果没有定义乌龟名称,就在命令行中加上
turtle_name = argv[1];
} else {
// 从 launch 文件获取乌龟名称参数
private_node.getParam("turtle", turtle_name);
}
ros::NodeHandle node;
// 订阅一个节点的 pose msg,在回调函数中广播订阅的位姿消息到 tf2 坐标系统中
// turtle_name 为 turtle1 时广播 turtle1 的位姿到 tf 中
// turtle_name 为 turtle2 时广播 turtle2 的位姿到 tf 中
ros::Subscriber sub = node.subscribe(turtle_name + "/pose", 10, &poseCallback);
ros::spin();
return 0;
};
这个程序的意思是订阅输入乌龟的 pose 话题,然后在 poseCallback 回调函数中发布 world 到乌龟的 TF 变换,注意这个程序可以接收不同乌龟的 pose 消息,只要运行时指定乌龟的名称 turtle_name 即可,代码注释很详细,其他的就不说了,然后添加编译规则:
add_executable(turtle_tf2_broadcaster src/turtle_tf2_broadcaster.cpp)
target_link_libraries(turtle_tf2_broadcaster ${catkin_LIBRARIES})
直接编译:
catkin_make
基本上不会出问题,为了方便启动我们在 launch 文件中启动广播者:
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<param name="scale_linear" value="2" type="double"/>
<param name="scale_angular" value="2" type="double"/>
<node pkg="learning_tf2" type="turtle_tf2_broadcaster" args="/turtle1" name="turtle1_tf2_broadcaster" />
<node pkg="learning_tf2" type="turtle_tf2_broadcaster" args="/turtle2" name="turtle2_tf2_broadcaster" />
launch>
然后就可以直接启动了:
roslaunch learning_tf2 start_demo.launch
为了确定是否成功广播了变换,使用下面的命令查看一个变换的输出:
rosrun tf tf_echo /world /turtle1
如果在控制台输出类似下面的消息,则说明变换发布成功:
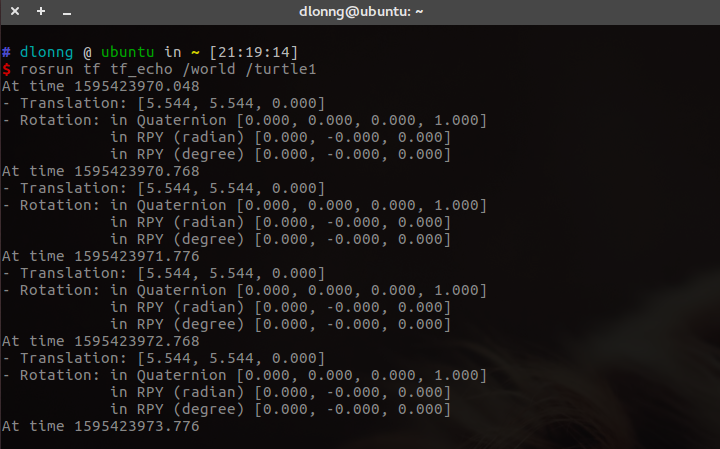
下面我们来编写一个 TF 接收者来使用我们上面发布的变换。
二、编写 TF 接收者
同样在 src 目录下创建 turtle_tf2_listener.cpp,代码如下:
#include
// 接受 tf 变换
#include
// 转换消息
#include
// 发布到乌龟 2 的运动消息:角速度和线速度
#include
// 再生服务
#include
// 实现乌龟 2 跟随乌龟 1 运动
int main(int argc, char** argv)
{
// 当前节点的名字
ros::init(argc, argv, "my_tf2_listener");
ros::NodeHandle node;
ros::service::waitForService("spawn");
ros::ServiceClient spawner = node.serviceClient("spawn");
turtlesim::Spawn turtle;
turtle.request.x = 4;
turtle.request.y = 2;
turtle.request.theta = 0;
turtle.request.name = "turtle2";
spawner.call(turtle);
// 角速度和线速度消息发布者,用来发布计算后的新的速度消息
ros::Publisher turtle_vel = node.advertise("turtle2/cmd_vel", 10);
// tf 变换缓存区,最多缓存 10 秒
tf2_ros::Buffer tfBuffer;
// 创建监听 tf 变换对象,创建完毕即开始监听,通常定义为成员变量
tf2_ros::TransformListener tfListener(tfBuffer);
ros::Rate rate(10.0);
while (node.ok()) {
// 用来保存寻找的坐标变换
geometry_msgs::TransformStamped transformStamped;
try{
// 寻找坐标变换
transformStamped = tfBuffer.lookupTransform("turtle2", "turtle1", ros::Time(0));
}
catch (tf2::TransformException &ex) {
ROS_WARN("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 用来保存角速度和线速度
geometry_msgs::Twist vel_msg;
// 新的角速度为寻找到的变换角速度的 4 倍 - 使得第二个乌龟的运动轨迹转弯更快,且轨迹是弧线
vel_msg.angular.z = 4.0 * atan2(transformStamped.transform.translation.y, transformStamped.transform.translation.x);
// 新的线速度是寻找到的变换线速度的 0.5 倍 - 使得第二个乌龟的运动速度为第一个乌龟的一半
vel_msg.linear.x = 0.5 * sqrt(pow(transformStamped.transform.translation.x, 2) + pow(transformStamped.transform.translation.y, 2));
// 发布新的速度消息,乌龟 2 节点的内部订阅了这个消息,所以乌龟 2 会收到新的角速度和线速度,以此产生跟随运动
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
这里关键的代码如下:
// 保存寻找的变换
geometry_msgs::TransformStamped transformStamped;
// 寻找 turtle1 到 turtle2 的坐标变换
// target_frame: turtle2
// source_frame: turtle1
// ros::Time(0): 获取变换的时间,
transformStamped = tfBuffer.lookupTransform("turtle2", "turtle1", ros::Time(0));
同样添加编译规则:
add_executable(turtle_tf2_listener src/turtle_tf2_listener.cpp)
target_link_libraries(turtle_tf2_listener ${catkin_LIBRARIES})
然后编译:
catkin_make
在上面广播者的 launch 文件中加上接收者的启动:
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<param name="scale_linear" value="2" type="double"/>
<param name="scale_angular" value="2" type="double"/>
<node pkg="learning_tf2" type="turtle_tf2_broadcaster" args="/turtle1" name="turtle1_tf2_broadcaster" />
<node pkg="learning_tf2" type="turtle_tf2_broadcaster" args="/turtle2" name="turtle2_tf2_broadcaster" />
<node pkg="learning_tf2" type="turtle_tf2_listener" name="listener" />
launch>
然后启动:
roslaunch learning_tf2 start_demo.launch
运行时会出现 2 个小乌龟,把窗口焦点放到终端,按上下左右键会发现第二个乌龟跟随第一个乌龟运动:
但是刚启动时终端会报个错误:
[ERROR] [1418082761.220546623]: "turtle2" passed to lookupTransform argument target_frame does not exist.
[ERROR] [1418082761.320422000]: "turtle2" passed to lookupTransform argument target_frame does not exist.
这是因为我们在 turtle2 还没有产生之前就寻找变换,导致没有找到它,为了解决这个问题可以在寻找变换前等待变换可用:
// 第四个参数是阻塞等待的超时时间
listener.waitForTransform("/turtle2", "/turtle1", ros::Time::now(), ros::Duration(3.0));
transformStamped = tfBuffer.lookupTransform("turtle2", "turtle1", ros::Time(0));
加上这句运行时就不会报错了,今天就写到这里,下次见:)
推荐阅读:
厦大同学,与你分享编程,AI 算法等技术干货!精品文章创作不易,谢谢关注,欢迎在看。

点击阅读原文,查看更多精彩文章!
评论