
实时车道线检测和智能告警 | 车距 + 弯道 + 车道线
作者:Priya Dwivedi
编译:ronghuaiyang
车道线检测 + 距离告警 + 转弯曲率半径计算。
代码:https://github.com/MaybeShewill-CV/lanenet-lane-detection
介绍
自动驾驶将在未来十年给旅行带来革命性的变化。目前,自动驾驶应用正在进行各种应用案例的测试,包括乘用车、机器人出租车、自动商业送货卡车、智能叉车和用于农业的自动拖拉机。
自动驾驶需要一个计算机视觉感知模块来理解和导航环境。感知模块的作用包括:
-
检测车道线 -
检测其他物体:车辆、人、环境中的动物 -
跟踪检测到的对象 -
预测他们可能的运动
一个好的感知系统应该能够在各种驾驶条件下 —— 白天/晚上,夏天/冬天,雨雪等等,实时做到这一点。在这篇博客中,我们着眼于一个实时模型,用于检测车道线、其他车辆等,并生成警报。
训练一个实时的车道线检测器
车道检测问题通常被定义为语义或实例分割问题,目标是识别属于车道类别的像素。
TUSimple是车道检测任务常用的数据集。该数据集包含3626个道路场景的标注视频剪辑。每个剪辑有20帧。这些数据是通过安装在车上的摄像头捕捉到的。下面分享了一个示例图像及其标注。
在这个数据集上,我们可以训练一个语义分割模型来分割出属于lane类的像素。U-Net model非常适合做这个,因为它是一个具有实时推理速度的轻量级模型。U-Net是一种带有跳跃连接的编译码器和解码器模块的编译码器模型。模型架构如下所示。
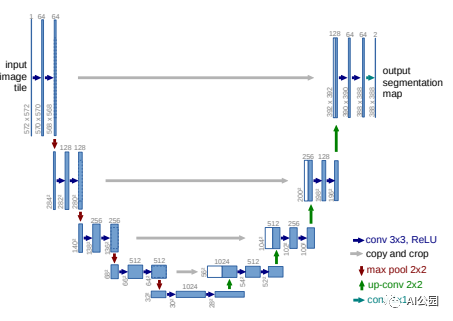
然而,损失函数需要修改为Dice损失系数。车道线分割问题是一个极其不平衡的数据问题。图像中的大多数像素属于背景类。Dice Loss基于Sorenson-Dice系数,其对false positives和false negatives的重要性相似,这使得它在处理不平衡数据问题时表现得更好。Dice损失试图匹配groundtruth和预测模型中的车道线像素,希望能够得到一个清晰的边界预测。
LaneNet模型
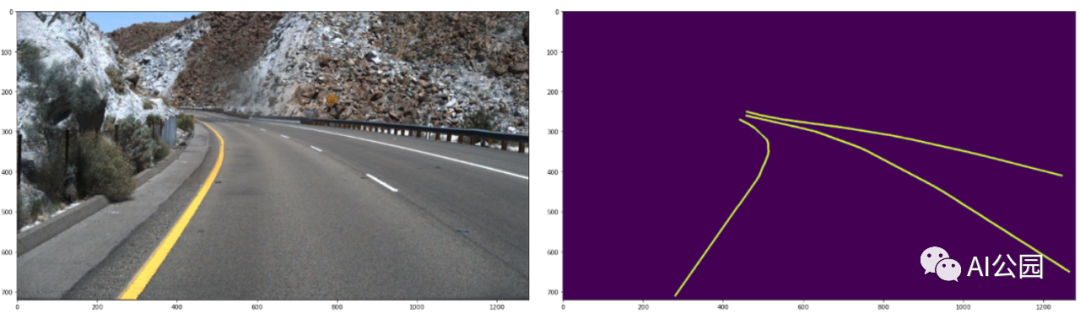
这里,我使用了LaneNet模型来生成车道线。LaneNet模型是一种两阶段车道线预测器。第一阶段是一个编码器-解码器模型,为车道线创建分割掩码。第二阶段是车道先定位网络,从掩码中提取的车道点作为输入,使用LSTM学习一个二次函数来预测车道线点。
下图显示了这两个阶段的运行情况。左边是原始图像,中间是阶段1的车道线掩码输出,右边是阶段2的最终输出。

生成智能告警
我将车道线预测与物体检测结合起来,生成智能警报。这些智能警报可能涉及:
-
检测其他车辆是否在车道线内,并量度与他们的距离 -
检测邻近车道上是否有车辆的存在 -
了解弯曲道路的转弯半径
在这里,我使用YOLO-v5来检测道路上的汽车和人。YOLO-v5在检测道路上的其他车辆方面做得很好。推理时间也非常快。
下面我们用YOLO v5来测量自己的车和前面最近的车的距离。模型返回的距离以像素为单位,可以根据相机参数转换成米。由于TUSimple数据集的相机参数未知,我根据车道线的标准宽度估计了像素到米的转换。
我们可以类似地计算车道的曲率半径,并将其用于汽车的转向模块。
总结
在这篇博客中,我们探讨了在自动驾驶中准确和快速检测车道线的问题。然后,我们使用YOLOv5来构建对道路上其他物体的理解。这可以用来生成智能警报。
英文原文:https://towardsdatascience.com/real-time-lane-detection-and-alerts-for-autonomous-driving-1f0a021390ee
—版权声明—
来源:AI公园
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!
—THE END—