
机器人操作系统的实践与思考

ROS(机器人操作系统),是专为机器人软件开发所设计出来的一套电脑操作系统架构。它是一个开源的元级操作系统(后操作系统),提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
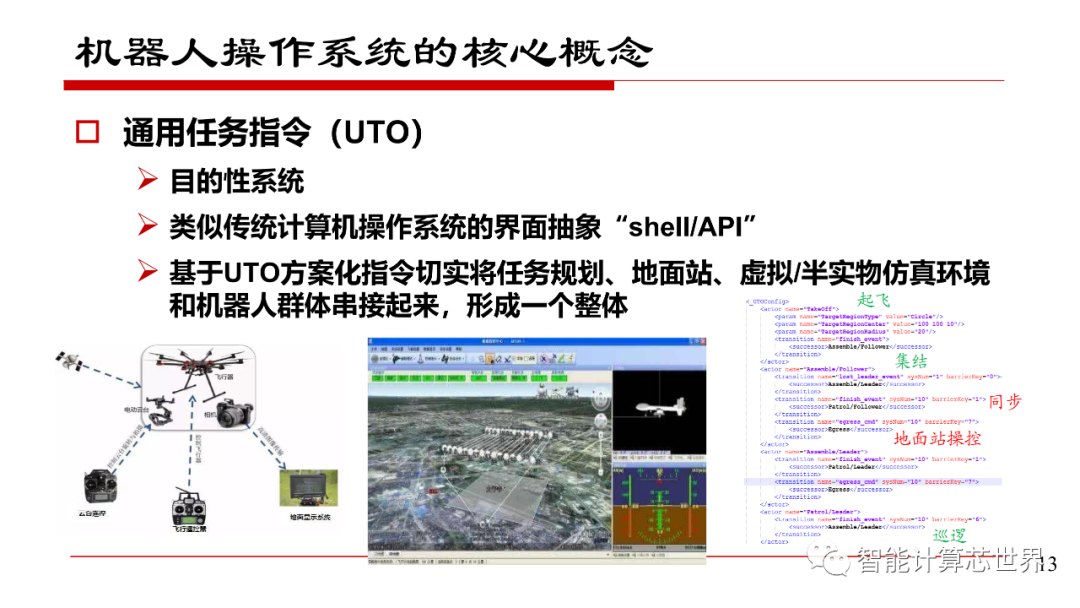
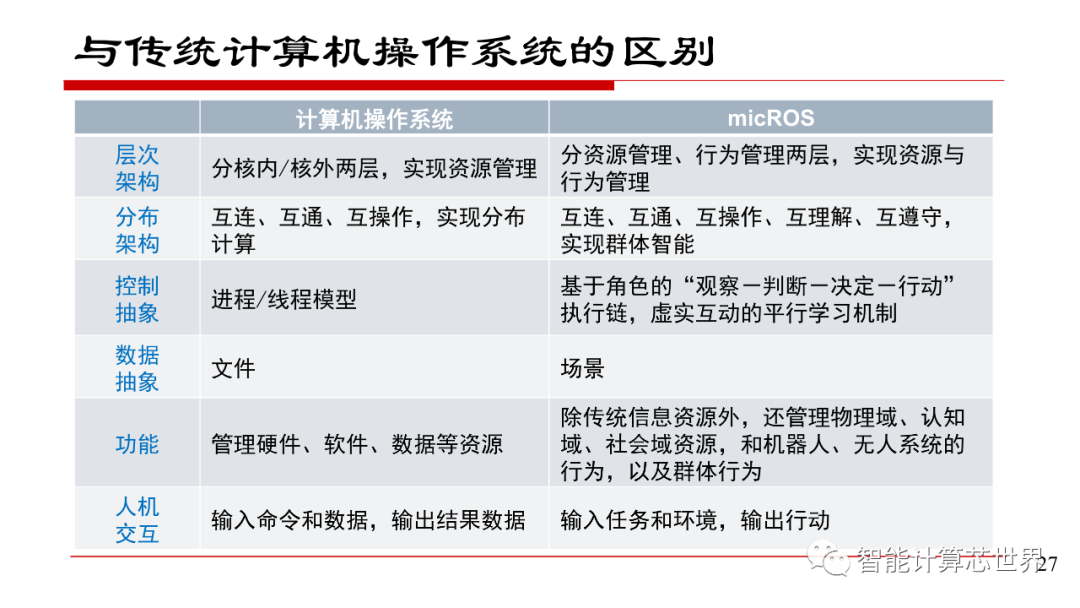
机器人时代操作系统的挑战在于机器人如何与人共融?每一类机器人都有大量专用软件,这些专用软件把机器人看作“工具”或“用具” ,机器人具有资源多域异构特征,难以满足跨域协同的需求。
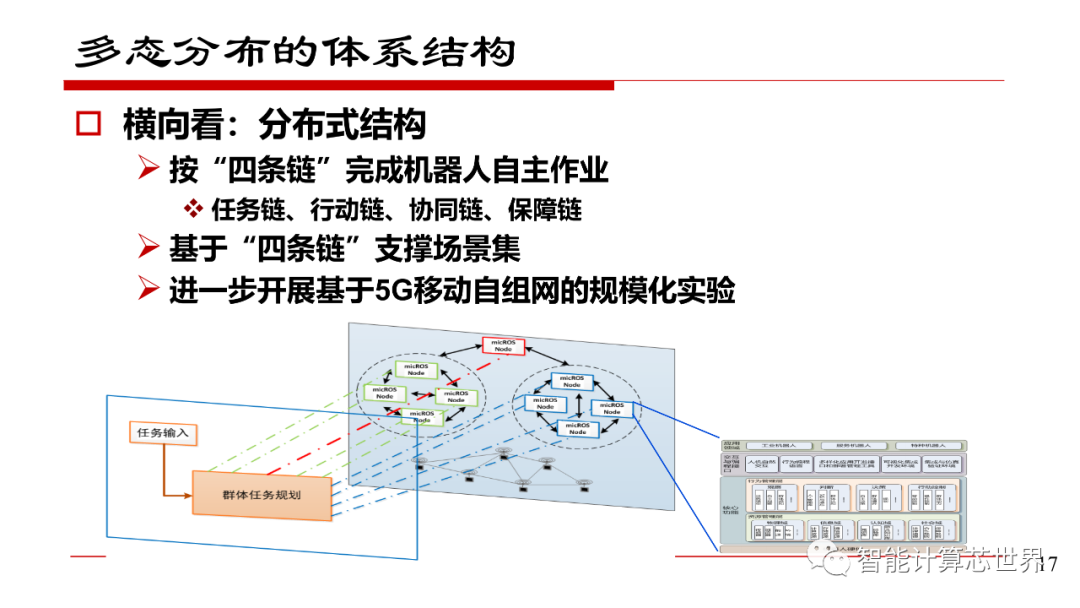
复杂环境下机器人的自主行为控制与协同?采用“感知—规划—行动”控制回路,作业环境、个体行为及自身状态复杂多变,具有不确定性。单体智能提升的基础上,如何聚合多个单体智能形成群体智能?
本号资料全部上传至知识星球,更多内容请登录全栈云技术知识星球下载全部资料。



2、信创产业研究框架
3、ARM行业研究框架
4、CPU研究框架
5、国产CPU研究框架
6、行业深度报告:GPU研究框架
本号资料全部上传至知识星球,更多内容请登录全栈云技术知识星球下载全部资料。

免责申明:本号聚焦相关技术分享,内容观点不代表本号立场,可追溯内容均注明来源,发布文章若存在版权等问题,请留言联系删除,谢谢。
电子书<服务器基础知识全解(终极版)>更新完毕,知识点深度讲解,提供182页完整版下载。
获取方式:点击“阅读原文”即可查看PPT可编辑版本和PDF阅读版本详情。
温馨提示:
请搜索“AI_Architect”或“扫码”关注公众号实时掌握深度技术分享,点击“阅读原文”获取更多原创技术干货。
评论