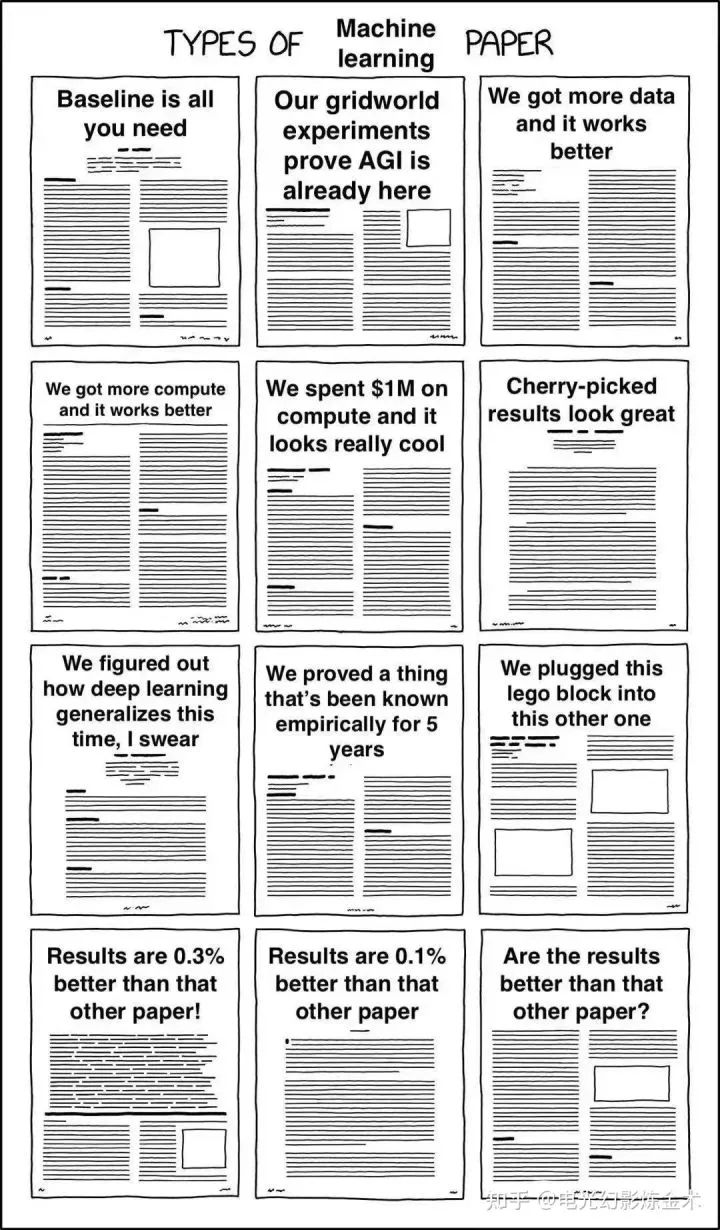
计算机视觉顶尖期刊和会议的段子
CVPR/ICCV/ECCV常见论文:
我们在imagenet上提升了0.1%!
研究生梯度下降(graduate student descent)是最重要的技术!
我们很快将释放代码,也可能用很长时间。
我们是第一个把transformer用到这个任务的!
我们采用了更多的计算资源,发现很老的一个基线方法是最好的!
Neurips:
1.我提出了一个新的任务,尽管可能没什么实际意义。
2.经过精心挑选,我们的结果看上去不错!
3. 我们提出的方法在我们生成的非公开数据集上很有效!
ICML:
1.我们证明了五年以前大家都知道的东西!
2.我们有很复杂的连自己也看不太懂的公式。
ICLR:
虽然我们是一个比较新的会议,但是我们仍然在鄙视链顶层。
Open review不代表我们论文质量高,可能只是我们脸皮厚。
AAAI
1.我们的审稿人看不懂我们做了什么,反正通过了。
2.我们将已有方法运用到了新数据集,发现它超过了SOTA 1%!
3.我们发现把已有模块插入到当前的任务,可以涨点!
IJCAI
我们的中奖率只有不到15%,真的不是水会,CCF别踢我。
不是我们实验不够,六页真的啥都放不下。
没错,我们的论文如果能投三大会我就投三大会了,投IJCAI实在没办法,日子总还是要过的嘛。
发现有很多人看,所以再扩展到一些非CV类会议。
SIGGRAPH
只要录取率足够低,圈内都是自己人,把圈外人门关上,焊的死死的。
SIGGRAPH可不是像水会,我们CG就这一个顶会,质量杠杠的。别看了,说的就是你们,视觉三大会一个比一个水。
Incremental的方法都不能发表,至于你要问我什么是incremental,demo视频PS地不好,就是incremental,外人我不告诉他。
ICRA/IROS
1.我们引用了30篇非常相关的论文,没错都是我们的论文。
2.我们研究了人与机器人的交互,但是可能没有人能用得到。
3.我们将机器学习应用到了已经解决的问题当中,发现它可以达到相似的效果。
4. 我们也做了SLAM,但是比其他论文好2%。
5. 我们的sensor很创新,但是你们可能买不起。
6.我们又一次在模拟器中取得了完美的效果!
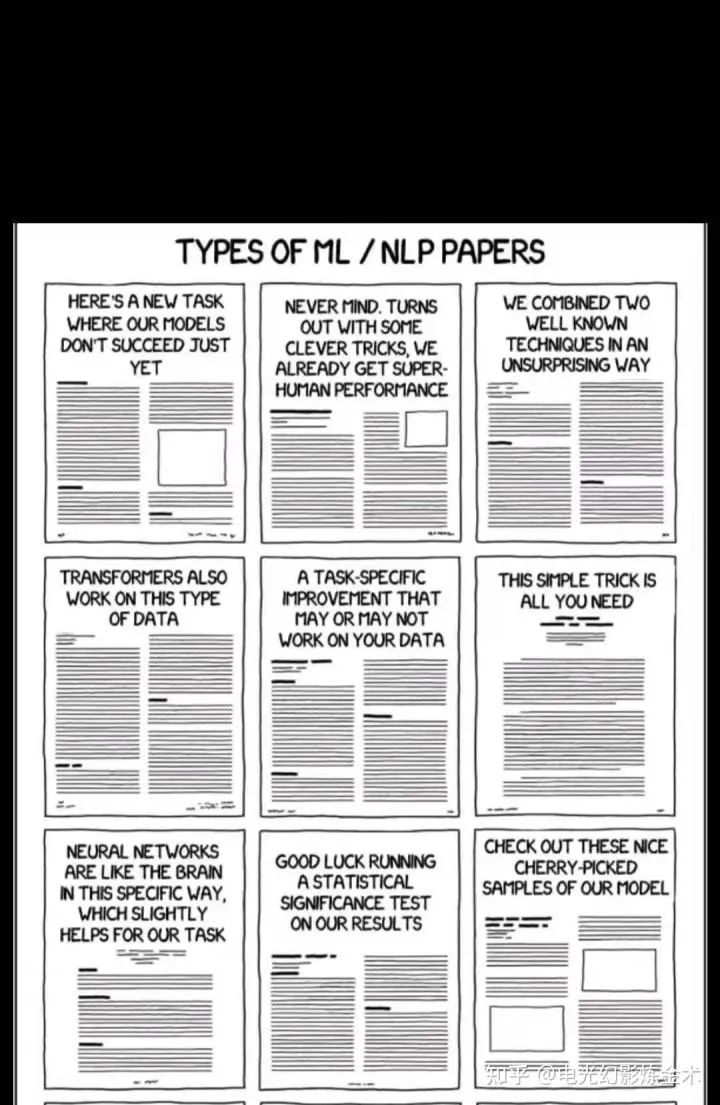
EMNLP:
1.我们在某个特定的任务上取得了提升,但是可能在你的数据上不work。
2. 你只需要这个简单的trick即可。
3. 我们的神经网络模拟了人脑思考的过程,可能对你的任务有一丢丢帮助。
4.预训练加bert真的很有效。
5.我们在大规模数据集上验证了结果,但是你想要复现,可能还需要一些运气。
下面是部分出处,点赞后存哈!