
机器人会“遁地术”?意大利理工学院蚯蚓仿生机器人可用于探索和救援

大数据文摘转载自机器人大讲堂
机器人打洞技术哪家强?
或许这款机器人可以展示一下子它的遁地术。

IIT新型软体机器人
意大利理工学院(IIT)的研究人员们提出了一款新型软体机器人,当空气通过或被抽出时,柔软的致动器就会伸长或挤压,从而使它能够爬行。
这蠕动的身影,机智的小伙伴可能已经猜到这款机器人的灵感来源,没错,就是蚯蚓。
在自然界中许多动物(如蛇、蚯蚓、蜗牛和毛毛虫)可以利用身体的灵活性和沿身体长度产生物理行波的能力来移动和探索不同的环境。
此次研发团队正是从大自然中汲取灵感,通过对蚯蚓运动力学的透彻理解和应用,创造了类似蚯蚓的机器人。
机器人利用肌肉层的交替收缩,通过产生逆行蠕动波,在土壤表面以下和上方推动自己。它们身体的各个部分(异构体)具有特定数量的流体,这些流体控制内部压力以施加力,并执行独立,局部和可变的运动模式。
研发团队表示,这款机器人是开发地下探索设备的起点,也是密闭空间搜索和救援行动以及探索其他行星的起点。
该项研究以论文(An earthworm-like modular soft robot for locomotion in multi-terrain environments)为题发表于《Scientific Reports》期刊中。

蠕动的“穴居”技术人员
地下“工作者”是如何实现运动的?IIT研究人员研究了蚯蚓的形态,并通过创建柔软的机器人解决方案找到了一种方法来模仿它们的肌肉运动、恒定体积的腔室和它们毛发(setae)的功能。
团队开发了一种蠕动软致动器(PSA),可实现蚯蚓的拮抗肌肉运动。当空气被泵入其中时,它会从中性位置伸长,当从中抽出空气时它会压缩。
机器人蚯蚓的整个身体由五个串联的PSA模块组成,通过互连连接。目前的原型长45厘米,重605克。
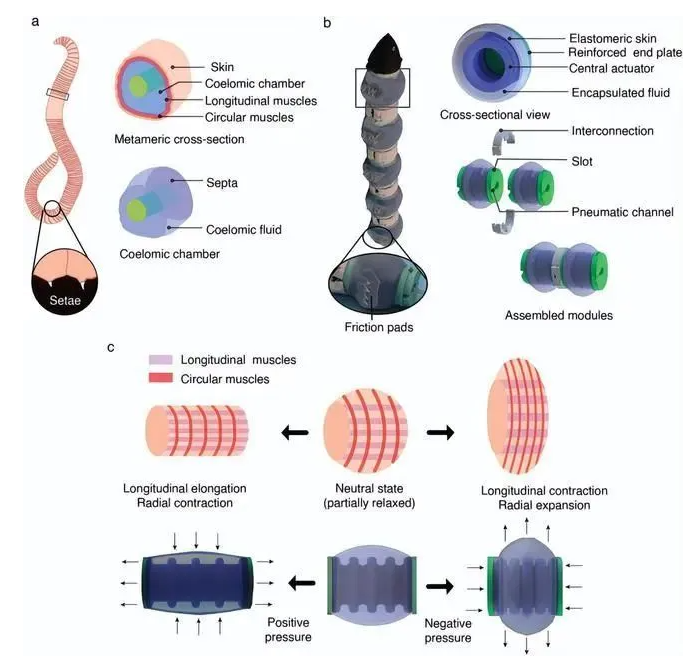
每个单独的致动器好似一个个密闭的罐子,“罐体”的表面是弹性皮肤,可以封装已知量的流体,从而模仿蚯蚓内部腔流体的恒定体积。
蚯蚓节段纵向变短,圆周变宽,并随着单个恒定容积室的纵向肌肉收缩而施加径向力。相反,随着周向肌肉的收缩,该节段沿前后轴变长,圆周变薄,导致沿轴线的穿透力。
每个执行器在 10 bar 正压下的最大伸长率为 97.1mm,在 11.13 bar 负压下的最大压缩率为 0.5mm,其独特的能力在于能够在单个执行器模块中同时产生纵向和径向力。
为了在平面上推动机器人,研发人员们将一块被动摩擦垫连接到机器人的腹面。该机器人以1.35mm/s的速度展示了改进的运动能力。
生物角度带来新启发
近几年来,软体机器人因为能适应各种非结构化环境,与人类的交互也更安全等多方面的优势,一直备受机器人领域科学家们的关注。凭借科学家们超前的想象力和快速学习大自然的能力,不同功能的软体机器人纷纷上线。

此次蠕动蚯蚓状软机器人的提出,不仅给软体机器人的发展提供了新思路,还从生物启发的角度更深入地了解了不同环境下的运动。
同时,这项技术的潜在应用也十分广泛,包括地下勘探、挖掘、地下环境中的搜索和救援行动以及对其他行星的探索。这种仿生的穴居软机器人是软机器人领域向前迈出的重要一步,为未来的进一步发展打开了大门。
接下来,研发团队将进行更深入的研究,使机器人在运动中减少打滑,并在保证速度的前提下找到机器人最佳的步态模式。
