
传感器性能和限制
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达


传感器性能和限制
为了更好地理解理论和制造的镜头性能之间可能发生的差异,示例1-3显示了在传感器水平上发生的情况,以及如何使用不同的波长和f/#s对传感器的输出进行可视化。数字从理论过渡到现实世界的例子,包括像差和镜头制造误差。如在MTF曲线和镜头性能中注意到的,波长越短,理论上成像系统的性能上限越大。近年来,蓝色LED已成为提高小型像素传感器性能的可靠选择。

Ex.1:在低f/#(理论值)时,光斑尺寸和像素输出随波长的变化
图1A和1B显示了四个不同的波长被完美成像,除了在包含3.45µm像素和f/2.8的传感器中心由衍射引起的模糊(见艾里斑和衍射极限)。这被认为是一个小像素尺寸,它与许多相机公司使用的非常流行的500万像素传感器有关。图1A显示了从470nm(蓝色)到880nm(NIR)波长时光斑尺寸的差异。图1B示出了由图1A中的镜头产生的每个图像的像素输出;注意与较短波长相关的较小斑点。

图1:在低f/#时,光斑尺寸和像素输出随波长的变化。
Ex.2:在高f/#(理论)下,光斑尺寸和像素输出随波长的变化
图2中的图像与图1类似,但光圈设置已更改为f/8。图2A显示了所有的点,无论波长如何,都超过了单个像素的大小,导致能量溢出到相邻像素中。图2B示出了在较长波长处的像素输出中的明显模糊,其中在880nm处的点不再能够被分离。这显示了改变f/#的一个影响,即使在理论上完美的系统中。
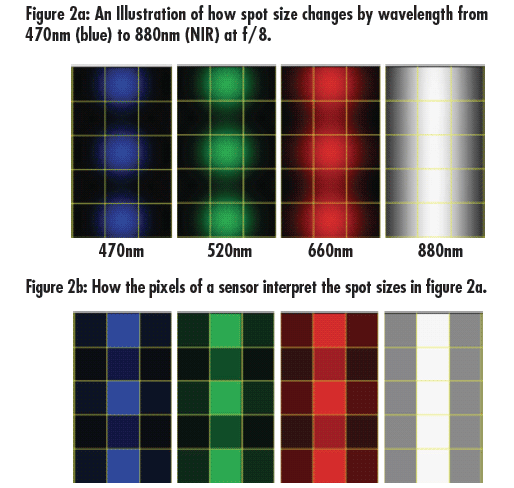
图2:光斑尺寸和像素输出随高f/#波长的变化。
Ex.3:包括像差的真实镜头中光斑尺寸和像素输出随波长的变化
这个例子是在f/2.8的真实镜头设计的中心和角落更真实。这些数字包括甚至在最高质量的镜头设计中固有的像差,以及与制造公差有关的影响。像差使信息错位并改变所产生的光点的形状,导致光点不是旋转对称的;所涉及的像差的总和产生了这种形状(关于像差的更多信息可以在像差中找到。注意,像差在图像的角落比中心更明显。在图1A和1B中所示的点与图3A和3B中所示的点相比有很大的不同;图1是理论演示,而图3使用的是真实镜头。注意像差如何影响图3C和3D所示图像中的光斑形状。
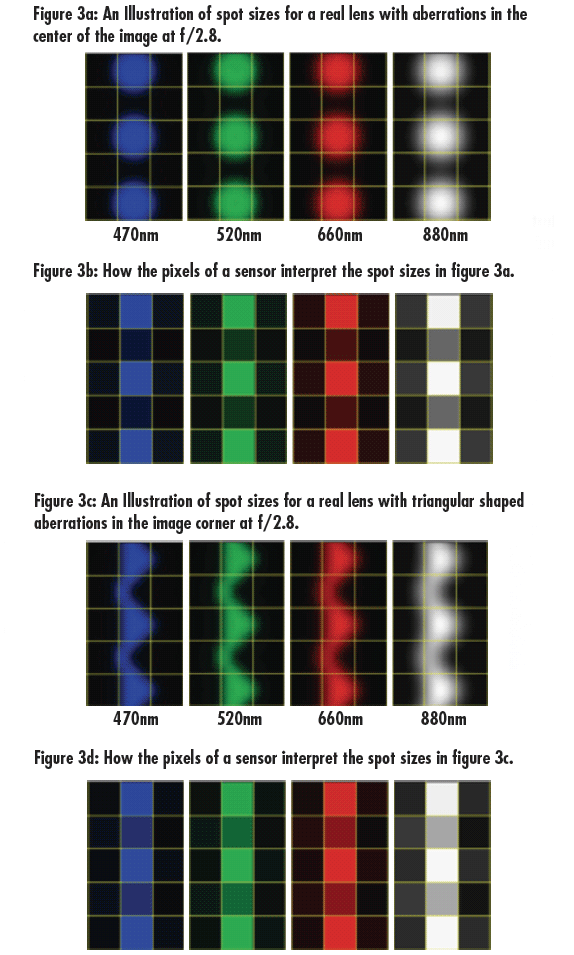
图3:包括像差的真实镜头中光斑尺寸和像素输出随波长的变化。
Ex.4:真实世界的镜头性能。实际图像。
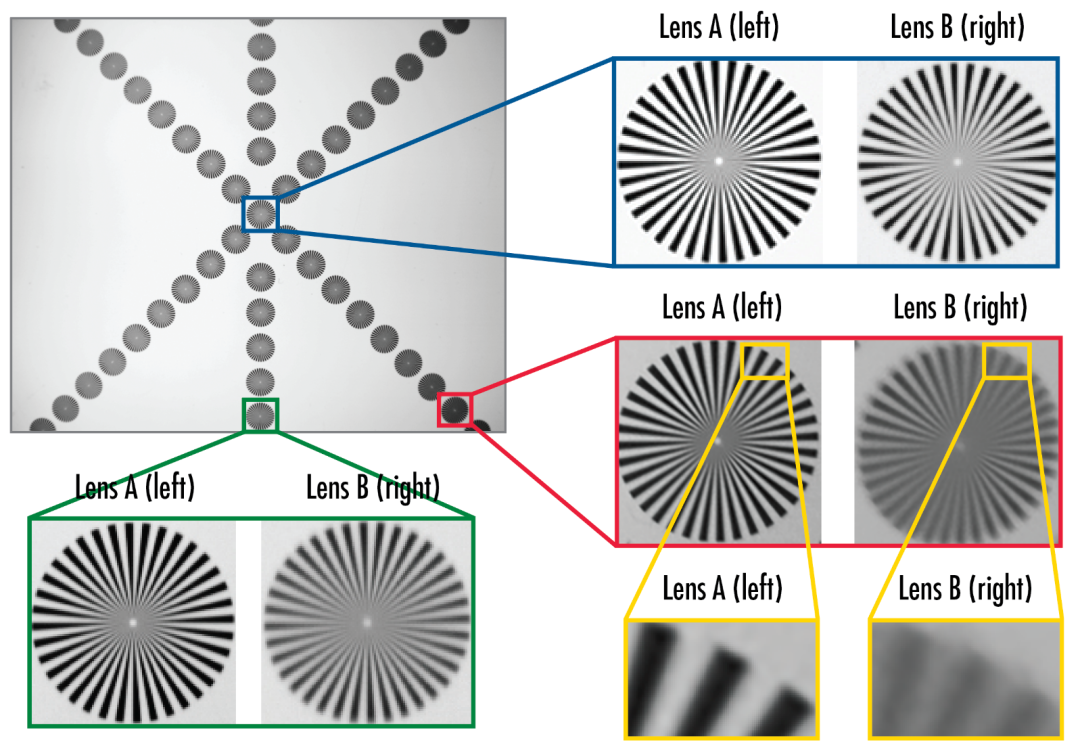
图4是一张应用图,显示了具有相同焦距(16mm)、f/#(f/2.8)和视场(FOV)(100mm,水平)的两个镜头的性能差异。这些图像显示了f/#、调制传递函数(MTF)和波长部分中详细介绍的所有概念。该目标是一个多元素星形目标,允许在所有方向的公共场点中同时显示大范围的频率(分辨率)。有关此目标和其他系统性能基准测试目标的更多详细信息,请参见分辨率和MTF测试。通过检查FOV的特写部分,可以看到性能上的差异。图4显示了由两个镜头成像的完整星体目标;在两个不同镜头之间的比较中,目标的中心、底部中间和角落的突出显示区域是兴趣点。本例中使用了3.45µm像素、总分辨率为5MP的Sony ICX625单色传感器和白光背光照明器。
and sensor.
图4:使用焦距、f/#、FOV和传感器相同的两个镜头(A和B)对恒星目标进行成像。
图4所示的比较显示了镜头A的优越性能。图像的角显示出较大的对比度差异;在镜头B的例子中,明显更难以区分黑色和白色。此外,不同像差(主要是散光)的方向性是显著的;可以看到与在径向方向上传播的线相关联的更多细节。
图4中图像角落的特写(黄色框)提出了一个额外的问题,即每个黑白线对总共覆盖大约10个像素。与图像中心的可分辨部分相比,角落的空间分辨率(由于模糊的圆覆盖了多个像素)从中心附近的5MP(2448×2050)降低到角落中的大约500×400像素,这低于VGA传感器(640×480像素)可以再现的分辨率。即使在传感器分辨率降低的情况下,由于设计限制和制造公差,从每个镜头的不同对比度可以看出,一些镜头仍然存在问题。镜头A的黄色框中的对比度水平为45%,镜头B的黄色框中的对比度水平为7%。
转自:韵翔光电
本文仅做学术分享,如有侵权,请联系删文。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~