基于5G移动通信系统融合定位的关键技术与系统架构演进
第5代(5G)移动通信系统驱动着互联网应用向物联网和工业互联网的方向发展。随着各类新型终端(如增强现实/虚拟现实设备、低功耗传感器、无人化智能机器设备)接入网络,5G应用对定位服务的需求持续增长,并且在定位场景、定位精度、定位安全性等方面出现了差异化、多样化的需求。基于5G网络提供的通信能力,可以融合5G带内定位、卫星定位、视觉定位等多种定位手段,从而大幅提高复杂环境下室内外综合定位系统的覆盖范围与定位精度。本文从系统架构和关键技术两个方面介绍了5G融合定位领域研究的最新进展,重点分析了5G带内无线定位和5G融合定位的技术路线,并展望了面向6G的时空服务系统的架构演进与技术挑战。
物联网的发展催生了丰富的通信及定位需求。第5代移动通信系统(5th-generation,5G)被广泛地认为是新一代互联网的基座,驱动着互联网应用向物联网和工业互联网发展。2015年9月,国际电信联盟正式提出了5G的三大应用场景。
增强移动宽带:面向人类多媒体感知,以高速率、大容量通信为特点,主要应用包括增强现实和虚拟现实,需要对设备位置进行精确定位以实现基于位置的媒体服务;
大连接物联网(massive machine type of communication,mMTC):面向物联网和传感网,以低功耗、密集链接为特点,相关定位需求包括关键物资及人员跟踪等;
超高可靠低时延:主要面向工业领域,以高可靠、低时延通信为特点,相关需求包括运营车辆定位,无人车、无人机的精确定位等。
定位导航授时(positioning-navigation-timing,PNT)技术可以在不同的场景下借助多种信号媒介来实现定位,包括无线电磁波、光波(视觉)、声波、惯性传感器、气压传感器、地磁信息等。其中,无线电定位的应用最为普及,包括了全球导航卫星系统(global navigation satellite system,GNSS)以及基于无线通信系统的定位,后者又包括移动通信系统、超宽带、无线局域网、蓝牙等。5G移动通信系统作为覆盖广泛的新一代宽带通信网络,有望成为新一代综合PNT体系的重要组成部分。5G定位的优势主要体现在两个方面:
利用高带宽、多天线等特点,通过5G带内无线定位实现定位服务区域的拓展,特别是室内等GNSS信号缺失区域的覆盖;
通过5G网络的通信能力、计算能力和业务能力(如网络切片与计费功能)为定位服务赋能,提供场景化、商业化的新型定位服务。
移动通信系统定位技术及其与综合PNT系统的融合是关系到国计民生的关键核心技术,也是当前国内外研究的热点。该领域的主要研究团队包括国内北京邮电大学的邓中亮教授团队[2]、武汉大学的楼益栋教授团队[3]、清华大学的陆明泉教授团队[4]、厦门大学的石江宏教授团队[5]等,以及国外巴塞罗那自治大学的Lopez-Salcedo教授团队[6]、加州大学欧文分校的Kassas教授团队[7]等。
当前,5G移动通信系统正在快速地演化升级中。2018年9月,3GPP确定了5G标准的第一版规范release15(rel-15);2020年7月,3GPP宣布5G标准的第二版规范Rel-16,是5G标准的第一次演化,其中也包括了5G定位技术与系统架构的演进。本文以最新发布的Rel-16为基础,综合介绍5G融合定位研究的最新进展。在文献[6]的基础上,本文的主要贡献包括以下3点:1)对Rel-16规范中提出的定位需求和参考信号设计进行梳理和介绍;2)对5G带内无线定位技术的增强原理和相关文献进行系统性的梳理,对比归纳了测距定位、测角定位、指纹定位这3大技术路线的优缺点和互补关系;3)梳理出5G定位服务的系统架构,阐述5G能够进行多源融合定位的原因,作为现有综合PNT系统的服务功能补充。
如表1所示,5G的Rel-16规范定义了5G定位服务需求的7个等级,从定位的水平及垂直精度、可用性、时延这4个指标进行区分。其中,前6个等级针对绝对定位,第7个等级针对相对定位。绝对定位计算用户在大地坐标系下的绝对坐标,而相对定位只需获得用户和基站的相对位置关系。用户场景和载体终端类型是区分5G定位服务等级的重要依据之一。
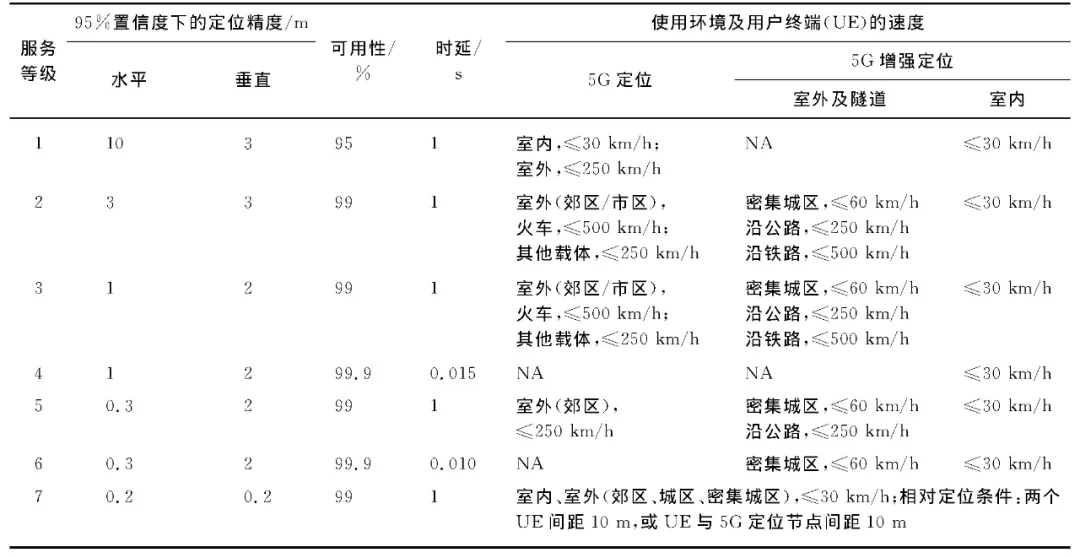
通常,商业手持终端和电子医疗相关设备对定位精度的要求分别为服务等级1和2;公路和铁路车辆定位中包含桥梁和隧道等场景,涉及垂直位置情况,对垂直精度要求更高,一般使用服务等级3;在紧急情况下对一线救护人员的跟踪和位置引导需要稳定地监测其水平和垂直位置的变化,因此常用服务等级4;工业自动化和无人机定位场景涉及安全性,需要持续可用的精确定位信息,因此必须满足服务等级5或6。
01
5G定位的可用参考信号
5G新空口(5G New Radio,5G NR)标准中定义了多类不同用途的参考信号,包括专门为定位功能设计的定位参考信号(positioning reference signal,PRS)。此外,5G网络中普遍使用的参考信号还有信道状态信息参考信号(channel state infonnation-reference singnal,CSI-RS)和同步信号。这些参考信号规定了物理层发送的无线信号形式,可为定位解算提供有益的信息。其设计特点直接影响5G带内定位的精度和定位性能。以下介绍3种可用于定位测量的参考信号。
(1)PRS
PRS是专门为5G带内无线定位功能设计的信号。Rel-16完成了专用于下行定位的PRS的标准化定义。沿用了长期演进(long term evolution,ITE)网络制式中的调制方式,5G NRPRS采用正交相移键控(quadrature phase shift keying,QPSK)调制的伪随机序列构成,具有特定的时频资源块分配方式,并且在时隙符号和子载波映射时受到一定约束:不能映射到分配给同步资源块(synchronization signal block,SSB)的资源粒子上,不与任何天线端口的小区参考信号重叠。
PRS在频域上可分布于24~272个物理资源块,在时域上一个时隙内可占有2,4,6,12个正交频分复用(orthogonal frequency division multiplexing,OFDM)符号。这种可配置的资源分布有利于实现高效的位置估计,并根据网络拥塞状态与定位精度要求动态分配时频资源,实现通信业务与位置服务的性能平衡和频率利用效率的最优化。
(2)CSI-RS
与一直发送的小区特定参考信号以及伴随数据发送的解调参考信号不同,CSI-RS配置更灵活并可以支持更多的端口。可将时域和频域连续的一个或者多个资源格作为1个基本单元,通过不同的复用以及组合形式构造出不同端口数的CSI-RS图样。在多基站场景中,尽管CSI-RS的频率复用因子为1,但是可以通过设置零功率(zero power,ZP)与非零功率(non-zero power,NZP)的信号来进行干扰测量。利用测量的干扰值和CSI-RS提供的多径信息,CSI-RS可辅助PRS进行精确的定位。
(3)同步信号
采用波束扫描方式实现同步信号的全小区覆盖,是5G NR的一大特点。LTE的主同步信号(primary synchronization signals,PSS)、辅同步信号secondary synchronization signals,SSS)和物理广播信道(physical broadcast channel,PBCH)位于载波中心,发送周期固定,即可覆盖整个小区。
5G NR部署在高频段时,基站必须使用大规模天线的大规模多入多出(MIMO)技术以增强覆盖,但是大规模MIMO的天线辐射图为非常窄的波束,单个波束难以覆盖整个小区,因此5G NR通过波束扫描的方式让信号覆盖整个小区。即基站在某一个时刻只发送一个或者多个波束方向,通过多个时刻发送不同的波束覆盖整个小区所需的方向。为了5G的UE实现下行同步,PSS、SSS、PBCH、PBCH解调参考信号(demodulation reference signal,DM-RS)必须同时发送,简称SSB。
02
5G参考信号的定位性能
目前大多数5G参考信号的定位研究均是利用PRS和CSI-RS进行时间测量的定位方案,暂时没有与角度定位方案相关的参考信号选择和设计的文献。从时域角度来讲,CSI-RS可以周期、半持续和非周期发送,从频域角度来讲,可根据子载波间隔设定不同的CSI-RS带宽。
该信号具有良好的自相关特性,便于利用峰值检测法得到信号从终端到各个基站的到达时间(time of arrival,TOA),进而利用到达时间差(time difference of arrival,TDOA)获得终端位置[8-9]。如:使用扩展卡尔曼滤波器[10]、卷积神经网络(convolutiona lneural networks,CNN)[11-12]基于CSI的室内定位方法和测量模型可达到最优厘米级的定位精度;Song等[13]提出的基于CSI传播模型的窄带物联网指纹定位算法,通过优化基于CSI传播模型的质心算法,定位精度可达分米级。
对于5G NR的PRS设计,目前还没有公开文献研究利用PRS全部有效带宽来提高观测TDOA(observedtdoa,OTDOA)的定位精度。但是有部分学者对PRS的定位性能进行了理论分析。ferre等[14]通过比较不同频段、不同梳状结构、不同子载波间隔下PRS的定位精度,仿真证明在fr2(410~7125mhz)频段、Δf=240khz、子载波间隔为12的条件下定位精度可达亚米级。
Schmidhammer等[15]以时延和多普勒估计的精度作为评判标准设计了PRS。Gerzaguet等[16]基于克拉美罗下界分析了不同功率谱密度的PRS波形的定位精度。destino等[17]提出一种贪婪搜索算法,让ue选择最合适的毫米波波束传输PRS来进行参考信号时间差(reference signal time difference,RSTD)测量,减小OTDOA定位误差。Yin等[18]就通信导航一体化方向,提出了一种新的定位通信集成信号,将功率和带宽都可配置的定位信号叠加在通信信号上,分析了定位信号对通信信号的干扰是可控的,从而减少了远近效应,提高测距精度。
CSI-RS、SSB是为通信分配的资源信号,当把CSI-RS、ssb用作定位测量信号进行时延估计和定位解算时,可以充分利用通信信号资源来提高信号测量精度。图1为几种信号在时频资源中的分配(仅展示一个物理资源块上的资源分布)。在OFDM系统中,根据时延估计的克拉美罗下界计算公式[19],在加性高斯白噪声(additive white gaussian noise,AWGN)信道下对几种不同参考信号的测距精度进行分析,结果如图2所示。可以看出,当上述几种参考信号共同用于定位时,测距的均方根误差(RMSE)最小,定位性能最佳。
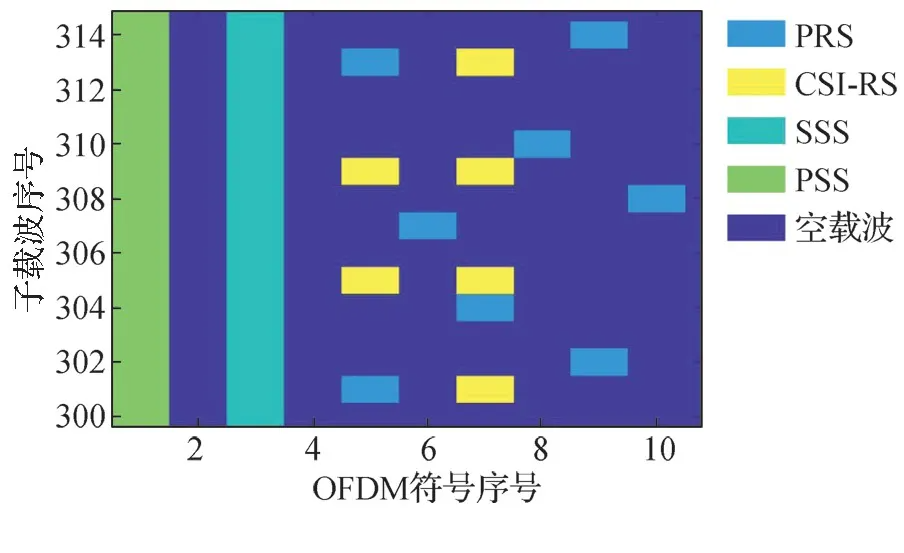
图1 不同参考信号的二维时频分布
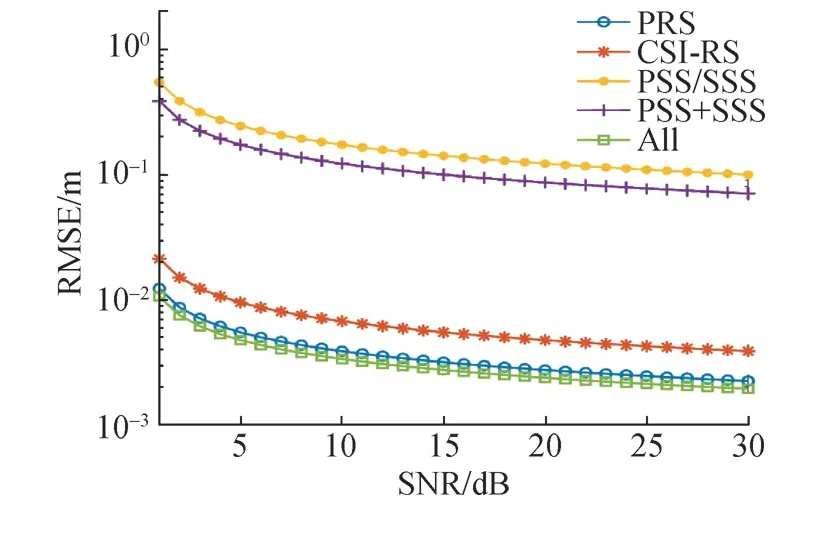 图2 AWGN信道下不同参考信号的测距精度
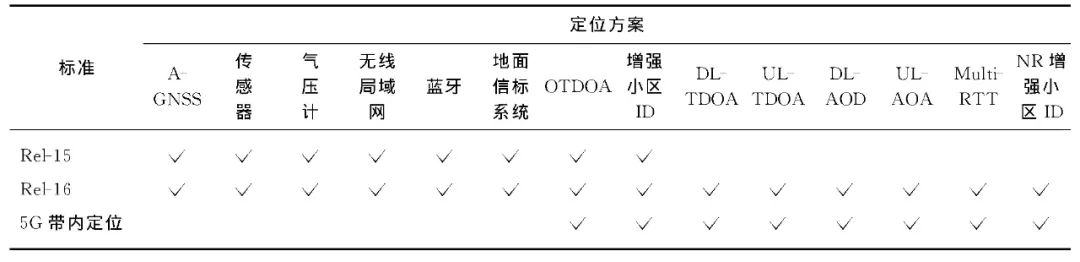
图2 AWGN信道下不同参考信号的测距精度Rel-16标准对5G系统支持的带内定位方式做出了较大的扩展[20],在原有基础上新增了下行离开角(downlink angle of departure,DL-AOD)、上行到达角(uplink angle of arriva,UL-AOA)、多次往返时间(multi-round-triptime,Multi-RTT)、DL-TODA、UL-TODA等新的定位测量手段。需要指出的是,5G标准中兼容了多种类的定位技术,如表2所示。其中前6列是基于5G以外系统的定位技术,依托5G的通信能力进行信息融合;而后8列是基于5G内部信号体制的带内无线定位技术。Rel-16的发布标志着带内定位技术第一次成为移动通信系统定位标准中的主要定位手段。
近年来,5G带内定位的相关研究得到了广泛的关注。如表3所示,本文从2个维度上对相关文献进行了分类梳理。第一个维度(表3横向)为当前希望解决的定位问题,包括了精度、覆盖和功耗3个类别:
1)精度问题主要指信号测量误差,包括受通信质量和基站同步等影响而导致的PRS测量误差、因传播环境复杂导致非视距传输引起信号衰落等误差、3D定位时由于基站天线位置过高引起的垂直精度误差;
2)基础设施覆盖问题主要指在室内和城郊等地区,因基站数量有限,难以保证连读的高精度定位覆盖;
3)功耗问题主要指5G应用场景中(特别是MMTC场景)包括了大量的嵌入式终端,需要实现低功耗的定位。
表3 5G定位相关文献分类和总结
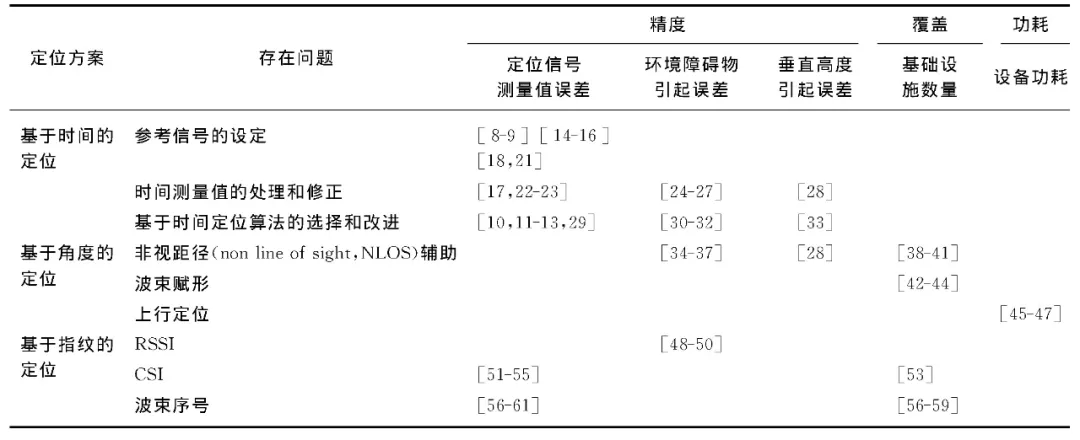
文献分类的第二个维度(表3纵向)是技术方案,包括了基于时间、角度和指纹这3大类定位方案。这3类方案的定位原理有着本质上的区别,构成了其他各种复合型无线定位方案的基础。
其中,基于时间的定位方案又可进一步细分为3类:
1)选择或设计5G参考信号用于检测定位信号,从而提高定位精度;
2)由于信号传输的时延不一定是采样周期的整数倍,通过处理和修正参考信号测出的时间测量值,减小时延估计误差;
3)根据定位设备的不同动力学模型和定位环境的约束,选择并改进时延估计算法和时间定位算法。
基于角度的定位方案也可细分为3类:
1)通过周围环境确定反射径的虚拟锚节点,将其转换成可用的视距分量,为确定环境的定位提供辅助信息;
2)控制基站天线阵列形成不同方向的波束用于估计到达角,结合从接收信号获得的toa值实现定位;
3)在网络侧执行定位解算,通过中心化处理器获得定位结果。基于指纹的定位方案也可细分为基于接收信号强度指示(received signal strength indication,RSSI)、CSI和波束序号3类参数作为指纹信息。
从表3的文献分布情况来看,基于时间测量定位的文献最多,重点解决精度问题,但有关垂直精度的研究较少。基于角度定位的文献对精度、覆盖和功耗这3个问题都有探讨,主要原因是大规模天线阵列的使用将使功耗问题及覆盖问题更为突出。基于指纹定位的文献重点关注精度和覆盖问题,但关注环境与无线电指纹的相互作用的研究仍然是空白。
5G带内定位技术之所以在Rel-16中展现出较快发展,其原因除了应用需求的驱动,还在于5G系统设计的关键技术支撑:
1)高频段毫米波传输技术和低时延、高精度同步技术可以提供高时间分辨率和多径鲁棒性,有利于提高基于时间定位方案及多径信道指纹定位方案的性能;
2)MIMO技术及统一的空中接口结构,基站和终端可配置N个天线,支持多用户波束智能赋形,提高波束空间分辨率,为测角定位提供基础;
3)5G新型信道编码技术以及信道模型对信道的空间一致性进行了更精确的描述,为基于多径信道的指纹定位方法提供了新的理论基础;
4)超密集异构网络和上下行解耦技术使得上下行信号可进行频繁的定位信息交互,实现在网络层面上利用基本定位技术结果进行第一道判断、其他多种定位技术测试量进行预测的混合定位算法,在不同层面反馈和判断定位数据,提高定位精度;
5)设备到设备通信技术在降低端到端的传输时延的同时,可由带内定位终端发送定位请求信息至可连接到4部及以上可实现5G基站定位的终端,弥补了无线网络覆盖盲区的定位需求。以下将基于上述前3个5G关键技术带来的5G带内定位技术发展做深入介绍。
01
带宽增强与测距定位
图3展示了使用不同带宽的PRS测量信号用于测量首径信号的效果,可以看到,增大系统带宽能够加快信号采样频率,准确采集到首径信号的概率增大,因此毫米波的大带宽特性能够增强基于时间定位方案的定位性能。
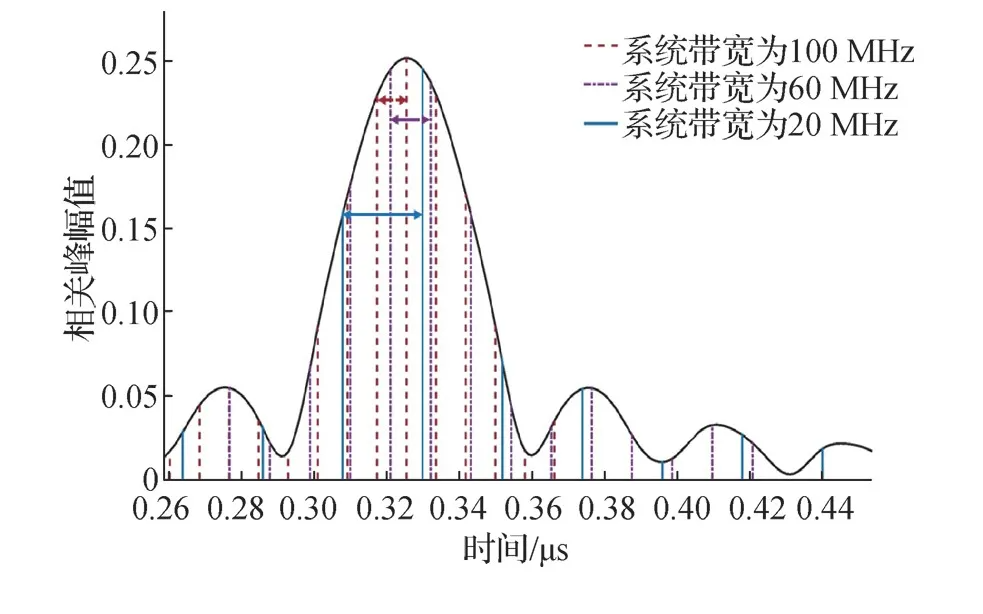
图3 不同带宽下PRS时延估计
对于基于TOA的位置估计,通过测量基站和终端接收信号之间的TDOA从而计算得到两者的相对距离,最后利用至少3个基站得到的交叠区域估计最终位置[62]。当接收端和发射端难以做到严格的时间同步时,可以通过信号到达2个基站的时间差Δt进行位置估计,称为基于TDOA的位置估计。5G技术带来的高频段、大带宽的特性对基于参考信号到达时间定位的TOA、TDOA技术增强具体体现在以下3个方面。
1)NLOS带来的定位误差可以得到更有效的消除。当测量信号是直射路径时,TOA、TDOA定位方法具有较佳的性能,因此大量研究围绕区分视距径(line of sight,LOS)和NLOS展开[24-26]。Kim[27]、Ling等[30]、Zandian等[31]和Zhang等[32]在TDOA系统中分别通过凸优化、对测试数据加权、有偏扩展卡尔曼滤波器、约束蚁群算法等方案,可减少NLOS误差,显著降低定位误差。
2)大带宽可以有效缓解RSTD测量值受通信质量[63]、基站同步准确性[64]等因素的影响而失准导致的测量误差问题。Gao等[21]提出一种可用于5G通信系统的手机被动定位方法,通过捕获前同步码序列并结合TDOA来估计手机位置,该方案在高噪声条件下仍具有较高的测量精度。当RSTD测量误差无法进一步减小的情况下,可以利用深度学习技术[22-23]和优化算法(如基于交替方向乘子法的迭代算法[29])对RSTD数据集进行处理,减小测量误差对定位结果的干扰。
3)大带宽可以解决TDOA在3D定位时因基站天线位置过高而引起的垂直精度差这一问题。Wigren[33]讨论了如何在不需要地图信息的情况下用所提出的曲面模型代替移动体的垂直自由度,将问题简化为一个高度修正的2D TDOA问题,提高3D TDOA定位的准确度。Lin等[28]采用基于高维线性插值的预处理方法对接收到的所有频段的数据进行联合处理,充分利用宽带毫米波系统提供的高时间分辨率进行位置估计,提高垂直定位精度。
02
天线增强与测角定位
为了解决毫米波弱穿透力带来的影响,5G引入了大规模天线阵列。传统基站一般是2,4和8个天线,而大规模天线阵可达到64,128和256个。
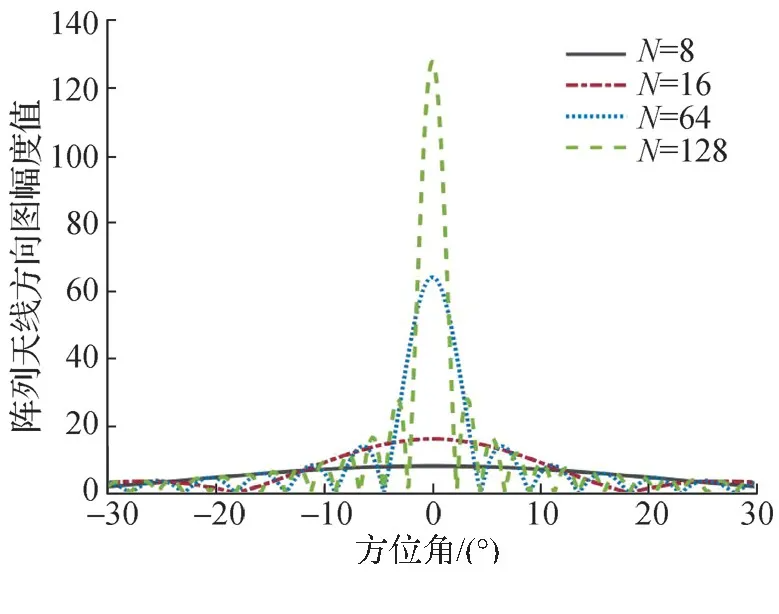
图4 不同天线数的阵列天线的辐射模式
(1)LOS与NLOS对角度定位的影响
传统测角定位方法通常需要在空间中找到LOS,当系统空间分辨率低时,接收信号波形中的信息不够丰富,难以准确解析用户的LOS;在5G网络中,毫米波大规模MIMO使得信号的指向性更强,系统角域的空间分辨率更高,不仅可解析出LOS分量,也可解析出NLOS分量用于位置和方向估计。
毫米波散射能力弱,因此系统中的散射NLOS很少。对于反射NLOS,可以通过周围环境的平面反射确定每一条反射径的虚拟锚节点,将其转换成可用的LOS分量。Witrisal等[34]的研究表明通过接收信号的强度和时延以及基于虚拟锚节点的几何模型,NLOS能够为确定环境的定位提供辅助信息。基于该结论:Shahmansoori等[35]和Mendrzik等[36]分析了在5G毫米波MIMO系统中NLOS部分对于AOA定位方案中位置和方向估计方面的作用,通过理论推导得出了在NLOS辅助下AOA定位的位置和方向误差范围。
仿真结果表明,与只用LOS的AOA定位相比,LOS和NLOS混合的定位方案精度提高了25%,同时在没LOS条件下,利用3个以上NLOS的角度信息也可以进行精确定位;Li等[37]通过环境感知和聚类分析识别LOS和NLOS,利用NLOS信号的空间特性来辅助改进的AOA室内定位方案;Lin等[28]提出了一种利用NLOS AOA的3D定位方案,以更少的复杂度实现更精确的定位。
(2)单基站与多基站对角度定位的影响
传统基于AOA信息的定位方案至少需要两个基站,架设多个基站、接入点(access point,AP)等基础设施增加了定位成本。在5G NR系统中,基站端相同的物理面积内可配备更多的天线,信号指向性更强,可以更加精准地估计每条路径的AOA值[65],因此仅使用单个基站即可实现基于AOA的精准定位。目前比较常用的单基站角度定位方案有两大类:利用波束赋形结合TOA的方案和利用NLOS的方案。
在大规模天线系统中,通过波束赋形技术可在收发器端形成窄传输波束,信号的指向性高,使用传统的多信号分类算法(multiple signal classification algorithm,MUSIC)或基于旋转不变技术的信号参数估计(estimating signal parameter via rotational invariance techniques,ESPRIT)算法就可得到高分辨率的AOA估计值[66-67]。因此,控制单基站天线阵到形成不同方向的波束估计AOA,结合从接收信号获得的TOA值,即可利用单基站实现基于角度的定位。Guerra等[42]最早提出了在LOS情况下收发端均采用大规模天线阵估计AOA值来实现定位的想法,推导了相应的位置和方向估计性能下界,同时比较了不同大规模天线阵到波束赋形对单基站AOA定位性能的影响。
(3)设备端和基站端对角度定位的影响
连续定位需要设备端根据接收到的定位信号不断解析定位信息并计算推导设备位置和方向,这一过程非常耗电[68],对设备的计算能力也有一定的要求。功耗问题是嵌入式终端定位中的一个关键问题。为了降低终端功耗,Rel-16给出了UL-AOA定位方案,将定位解算移到网络端执行,大大减少设备电量消耗。
虽然在增强小区ID定位中已经考虑了UL-AOA,但其仅测量服务基站相关信息。5G将UL-AOA定位的角度测量扩展到多个基站,用户可以在任何时刻获得准确的位置估计值,解决了终端的定位功耗问题。
使用网络侧进行定位来减小设备功耗最早由Werner等[45]提出,其利用一种可在网络端执行的基于AOA的卡尔曼滤波定位算法实现了设备的实时定位。Koivisto等[46]根据Werner等[45]提出的架构,针对5G车辆互联的场景,提出了考虑ap之间的相位偏差的基于AOA测量值的定位和跟踪方案。Menta等[47]针对网络侧定位中多个基站接收链路之间射频时钟漂移引起的相位随时间变化的问题,提出了一种校准补偿相位偏移的方案,可提高网络侧AOA定位的性能。
03
电磁环境感知增强与指纹定位
(1)RSSI指纹
由于RSSI测量的简单性和普遍性,RSSI是最早得到应用的电磁指纹特征。其对电磁环境的测量是粗粒度的,不能区分无线信号的到达路径以及其中蕴含的多径信道信息[71];此外,RSSI有很高的随机性,多径和阴影效应都使得它与距离的相关性变弱。因此,基于RSSI的定位精度有限,典型的定位误差在十几到几十米[48-49]。尽管RSSI指纹有天然的局限性,但是其便捷性和普遍性的优点也很突出。因此,近年来仍有关于RSSI指纹定位的持续研究,如seok等[50]利用深度学习将误差在特定场景下降到10m以内。
(2)CSI指纹
CSI中包含丰富的电磁指纹特征信息:具有明确物理意义的特征(如时域多径分量[51,72]、相位[52]、角度[53]、频率响应[54]等)和不具有物理意义的特征[73-74]。Lei等[73]和Studer等[74]用自编码器对CSI做基于特征提取的无监督训练,得到了信道图特征。当用多径分量做指纹时,多径分量的分辨率便成为影响精度的重要因素。Wang等[51]和Chen等[72]通过讨论信道带宽对多径分量分辨率的影响,确定定位精度能达到1~2m。大规模MIMO系统每个天线上都可以测量到CSI,此时影响精度的主要因素就是指纹的分辨率和位置标签的准确性[55]。Wang等[53]给出了在大规模MIMO系统中基于单基站和以角度-时延-信道增益矩阵为指纹的定位系统,当指纹参考点之间的距离为1m时达到了亚米级的定位精度。
(3)波束序号指纹
5G毫米波系统将大量使用大规模天线阵列,能够通过波束赋形技术形成多种模式的波束信号,进而产生与波束序号对应的指纹。Gante等讨论了CNN[56]、分层CNN[57]、短序列的长短时记忆网络[58]基于单基站的波束指纹序号定位系统的定位精度,三者均可达到2m左右。Zhang等[59]利用单基站开关波束天线形成的波束序号指纹通过多信号分类(MUSIC)-隐马尔可夫模型算法实现了亚米级定位精度。此外,DM-MIMO的天线分布间距比较远,每个天线相当于一个基站,因此DM-MIMO的每个接收天线单元均可收集移动终端的RSSI形成波束序号指纹[60-61]。
(4)信道的空间一致性与指纹定位的理论基础
指纹定位的一个很大的挑战在于指纹库的构建与维护,它的难点在于获取带位置标签的数据。当指纹特征更丰富时,指纹的分辨率和标签的准确性成为影响精度的主要因素。5G的大带宽和大规模MIMO技术都要求精细的5G信道模型[75]。空间一致性[76]是3GPP新认可的重要信道模型。在极其密集的场景下,当发射端或接收端移动或转向时,信道的变化依然相对平缓,即空间一致性使得信道模型为紧密分布的位置提供空间一致且平滑的随时间变化的信道脉冲响应(channel impulse response,CIR)。图5展示了运动场景下空间一致性的物理含义,其中图5(b)和(c)的每条曲线代表一个散射点簇对应的CIR信息(时延与功率)。
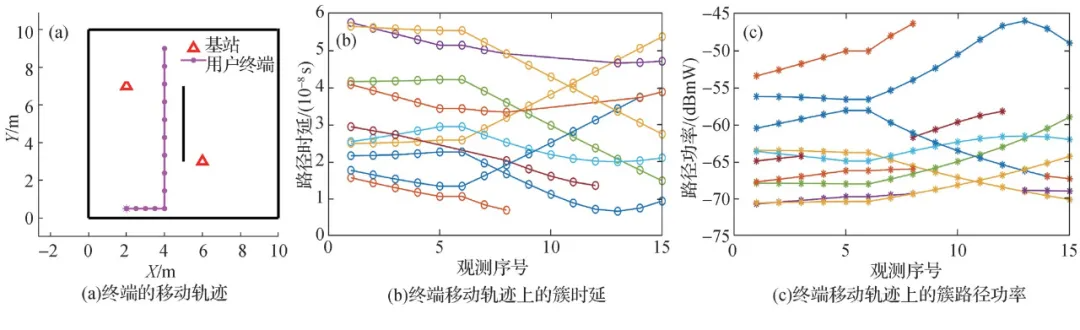
图5 5G空间一致性示意图
04
3类定位技术的对比
上述的3类定位技术各有优缺点。测距定位的系统复杂度低,在理想环境下定位精度高,但是其3点覆盖以及基站同步的要求容易受多径的影响。此外,在同样测量误差的前提下,基站几何分布对测距定位误差有较大影响。测距定位的这些弊端在测角定位中并不明显。测角定位所需要的基站数量少,定位精度受基站分布的影响较小。但是为了准确测量信号AOD和到AOA,发射及接收端必须配备方向性强的大规模天线阵列。

在LTE技术以前,3GPP的标准文件仅对蜂窝网络的室外定位技术框架与接口协议做出了定义,从Rel-13开始增加了对室内定位技术的支持,但主要为WiFi、蓝牙等非蜂窝网的定位技术。进入5G标准阶段以后,Rel-16提出了利用nr进行用户定位,在早期版本的OTDOR等测量方案基础上,增加了Multi-RTT、DL-TDOA、DL-AOD、UL-TDOA、UL-AOA等新型测量方案,极大地丰富了5G室内定位的技术实现途径。因此,5G多源融合定位不仅包括5G与其他定位源的融合,也包括5G系统内部不同测量方案的融合。
5G能够实现多源融合定位的原因主要有:
1)在定位架构方面,5G NR能够为多源定位融合提供支撑。Rel-16中提出了5GRAN(又称NG-RAN)中用户定位的架构和协议流程。与GSM/EDGERAN(GERAN)和通用移动通信系统陆地RAN(UMTS terrestrial RAN,UTRAN)不同,5G NR架构旨在向前兼容其他接入类型和其他定位方法,以减少未来增加定位源所需的额外定位支持。
2)在定位解算方面,5G具备强大的网络侧解算服务能力。Rel-16中提出了定位管理功能(location management function,LMF)实体,能够利用NG-RAN中定位的测量信息计算定位结果。同时,5G云计算和移动边缘计算分别支持集中式和边缘式定位数据处理,辅助实现高效的定位计算。所以,5G能够作为多源融合定位的平台,将多种方案优势互补,实现更加精准的定位。
01
5G定位服务的系统架构
3GPP的TS 38。305定义了NG-RAN的用户定位体系架构[20],如图6所示。在架构上,5G与LTE最大的区别在于:将LMF的位置前提至网络边缘,使得LMF更接近于NG-RAN。在LTE网络中,发起一次蜂窝网定位测量,需要经过多个核心网元的调度与分发[78],这将带来极大的网络延迟,很难实现异源测量信息的融合。而在5G网络中,由于LMF处于核心网边缘,其处理定位请求与资源调度的响应速度、对定位测量数据的处理延迟都得到了显著的改善,因此可实现对5G融合定位的有效支撑。
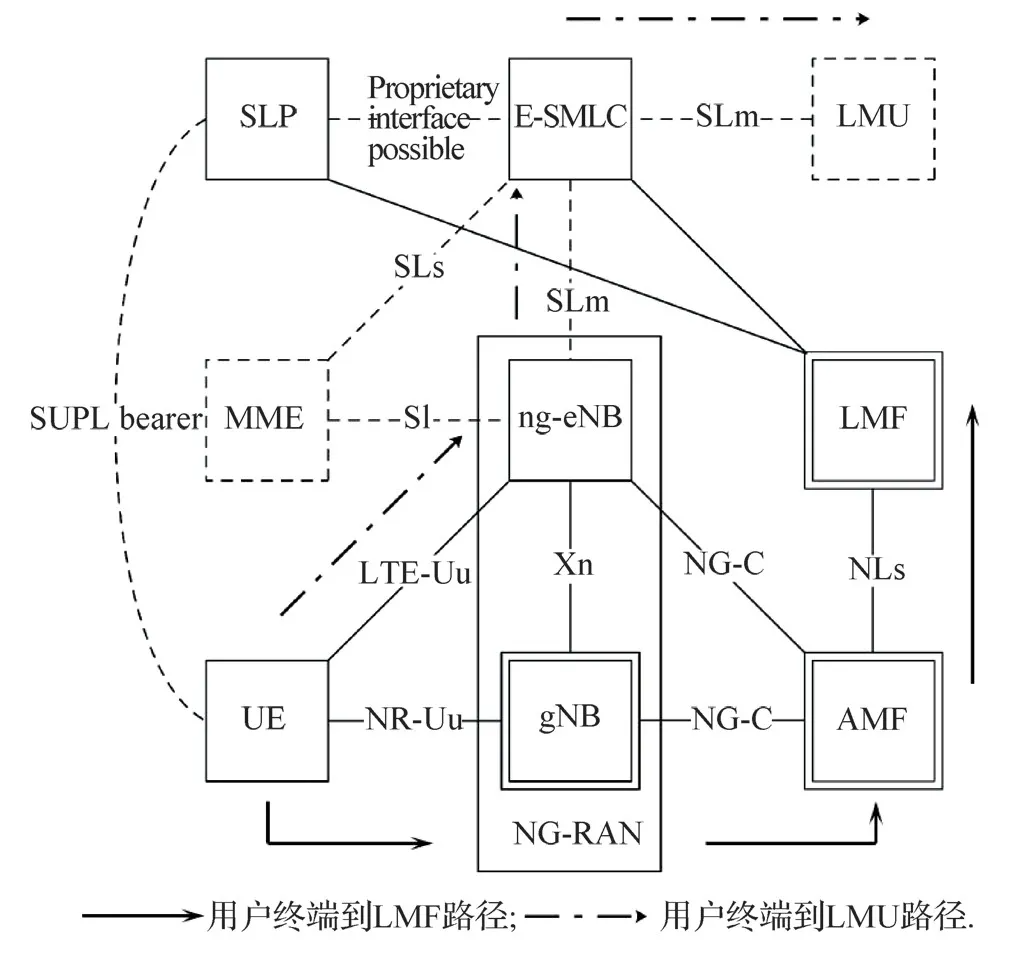
(实线框代表定位架构演进过程中被保留的部分;双实线框代表5G定位体系中增加的功能实体;虚线框代表5G定位架构中删除的部分。)
图6 适用于5GNG-RAN的用户定位架构[20]
当接入及移动性管理功能(access&mobility function,AMF)从网关移动位置中心(gateway mobile location center,GMLC)处接收到与位置服务有关的请求,或用户接收到与目标用户位置服务有关的请求,或者AMF代表目标用户决定启动某个位置服务(例如用户的紧急呼叫)时,AMF发送位置服务请求给LMF。LMF处理收到的位置服务请求,将测得的定位相关数据传输给目标用户。根据定位需求,由用户或者LMF计算定位结果。然后LMF将定位结果(例如用户的位置估计值)返回给AMF,AMF再将结果返回给发起定位的实体,实现基于用户或用户辅助的定位。
LMF与增强服务移动定位中心(evolved serving mobile location centre,E-SMLC)间可能具备专有信令,使得LMF能够从演进UTRAN(evolved UTRAN,E-UTRAN)获取信息,支持目标用户从基站获得下行链路测量值实现OTDOA等多种定位方法。
02
5G定位融合
仅适用5G信号测量值的融合定位方式,通常又称为5G带内定位[79]。现有研究中带内定位方案融合主要包括TDOA+AOA和TDOA/AOA+指纹。Zhao[80]、Ketabalian[81]、Chen[82]、Yue[83]、Kanhere[84]、Del Peral-Rosado[85]等研究了TDOA和AOA融合的定位方法,二者结合能够更好地解决基于时间定位方案中的同步问题和基于角度定位方案对设备旋转角度敏感的问题。He[86]、Sousa[22]、Chen[87]、Liu[88]等研究了TDOA/AOA与指纹融合定位,利用TDOA/AOA去除指纹定位中定位信息相似的错误位置参考点,提高位置映射和检索的准确性。
2019年,中国移动召开“5G+未来无限可能”大会,由中国移动发起的“5G精准定位联盟”正式成立,首次发布《5G+北斗高精度定位应用白皮书》,进一步赋能智慧城市与物联网的发展。
在网络融合方面,5G RAN与北斗高精度定位所需的地基增强系统网络均需要在全国范围内部署,因此在建站维护上天然存在着融合优势,对两个系统采用站点共享方式建设,已成为目前热门的议题
在定位能力融合方面,利用5G网络的覆盖优势可以实现对北斗高精度定位服务盲点进行有效补充,从而打造出一张室内外场景全域覆盖的高精度定位网络
在数据播发融合方面,采用移动通信信令的方式进行数据播发,高精度定位平台根据基准站网络的观测数据生成各网格区域的差分改正模型,按照格点区域与基站覆盖区域的映射关系将各区域的定位辅助信息推送至相应的基站,由基站向其覆盖区域内的终端进行广播,更好地融合5G与北斗地基增强网络成为实现智能化社会的一项重要举措
在终端融合方面,智能手机是我国北斗卫星导航系统应用中最大的大众应用市场,5G与北斗高精度定位在智能手机上的融合可以提高其定位性能,扩宽高精度定位的产业市场。
同时,二者与人工智能和大数据等技术的融合发展,必将促进物联网和智慧交通等下游行业的爆发和垂直应用的发展。
同时,在2019年9月初,欧洲发布6G白皮书《6G泛在无线智能的关键驱动因素及其研究挑战》。该白皮书提出未来6G愿景是实现泛在无线智能,并指出6G技术性能指标将比5G普遍提升10~100倍,这些技术场景对定位服务提出更高要求。太赫兹通信技术和智能化融合协作网络有助于提高需要高实时性和可靠性的定位服务;海量大连接,需要满足大量终端接入并摆脱不良节点信息干扰,超大规模天线阵列技术将为这类场景的定位问题提供解决方法;移动导航场景,需要为用户提供连续广域的信号覆盖、无缝稳定连接的室内外定位服务,这一场景下可以利用融合定位将多种定位技术平滑融合。
更多行业动态资讯