
"未来"的经典之作ViT:transformer is all you need!
共 16743字,需浏览 34分钟
·
2021-03-11 15:02
 点蓝色字关注“机器学习算法工程师”
点蓝色字关注“机器学习算法工程师”
设为星标,干货直达!
从2020年,transformer开始在CV领域大放异彩:图像分类(ViT, DeiT),目标检测(DETR,Deformable DETR),语义分割(SETR,MedT),图像生成(GANsformer)等。而从深度学习暴发以来,CNN一直是CV领域的主流模型,而且取得了很好的效果,相比之下transformer却独霸NLP领域,transformer在CV领域的探索正是研究界想把transformer在NLP领域的成功借鉴到CV领域。对于图像问题,CNN具有天然的先天优势(inductive bias):平移不变性(translation equivariance)和局部性(locality)。而transformer虽然不并具备这些优势,但是transformer的核心self-attention的优势不像卷积那样有固定且有限的感受野,self-attention操作可以获得long-range信息(相比之下CNN要通过不断堆积Conv layers来获取更大的感受野),但训练的难度就比CNN要稍大一些。
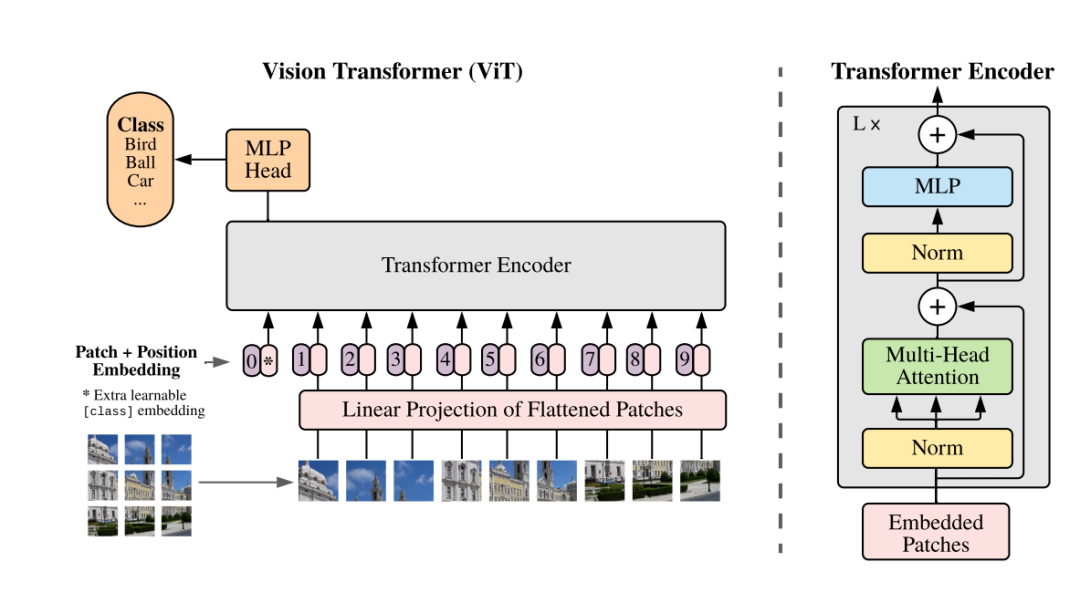
ViT(vision transformer)是Google在2020年提出的直接将transformer应用在图像分类的模型,后面很多的工作都是基于ViT进行改进的。ViT的思路很简单:直接把图像分成固定大小的patchs,然后通过线性变换得到patch embedding,这就类比NLP的words和word embedding,由于transformer的输入就是a sequence of token embeddings,所以将图像的patch embeddings送入transformer后就能够进行特征提取从而分类了。ViT模型原理如下图所示,其实ViT模型只是用了transformer的Encoder来提取特征(原始的transformer还有decoder部分,用于实现sequence to sequence,比如机器翻译)。下面将分别对各个部分做详细的介绍。
Patch Embedding
对于ViT来说,首先要将原始的2-D图像转换成一系列1-D的patch embeddings,这就好似NLP中的word embedding。输入的2-D图像记为,其中和分别是图像的高和宽,而为通道数对于RGB图像就是3。如果要将图像分成大小为的patchs,可以通过reshape操作得到a sequence of patchs:,图像共切分为个patchs,这也就是sequence的长度了,注意这里直接将patch拉平为1-D,其特征大小为。然后通过一个简单的线性变换将patchs映射到大小的维度,这就是patch embeddings:,在实现上这等同于对进行一个且stride为的卷积操作(虽然等同,但是ViT其实是不包含任何卷积操作的),下面是具体的实现代码:
class PatchEmbed(nn.Module):
""" Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=16, in_chans=3, embed_dim=768):
super().__init__()
img_size = to_2tuple(img_size)
patch_size = to_2tuple(patch_size)
num_patches = (img_size[1] // patch_size[1]) * (img_size[0] // patch_size[0])
self.img_size = img_size
self.patch_size = patch_size
self.num_patches = num_patches
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
def forward(self, x):
B, C, H, W = x.shape
# FIXME look at relaxing size constraints
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
x = self.proj(x).flatten(2).transpose(1, 2)
return x
Position Embedding
除了patch embeddings,模型还需要另外一个特殊的position embedding。transformer和CNN不同,需要position embedding来编码tokens的位置信息,这主要是因为self-attention是permutation-invariant,即打乱sequence里的tokens的顺序并不会改变结果。如果不给模型提供patch的位置信息,那么模型就需要通过patchs的语义来学习拼图,这就额外增加了学习成本。ViT论文中对比了几种不同的position embedding方案(如下),最后发现如果不提供positional embedding效果会差,但其它各种类型的positional embedding效果都接近,这主要是因为ViT的输入是相对较大的patchs而不是pixels,所以学习位置信息相对容易很多。
无positional embedding 1-D positional embedding:把2-D的patchs看成1-D序列 2-D positional embedding:考虑patchs的2-D位置(x, y) Relative positional embeddings:patchs的相对位置
transformer原论文中是默认采用固定的positional embedding,但ViT中默认采用学习(训练的)的1-D positional embedding,在输入transformer的encoder之前直接将patch embeddings和positional embedding相加:
# 这里多1是为了后面要说的class token,embed_dim即patch embed_dim
self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + 1, embed_dim))
# patch emded + pos_embed
x = x + self.pos_embed
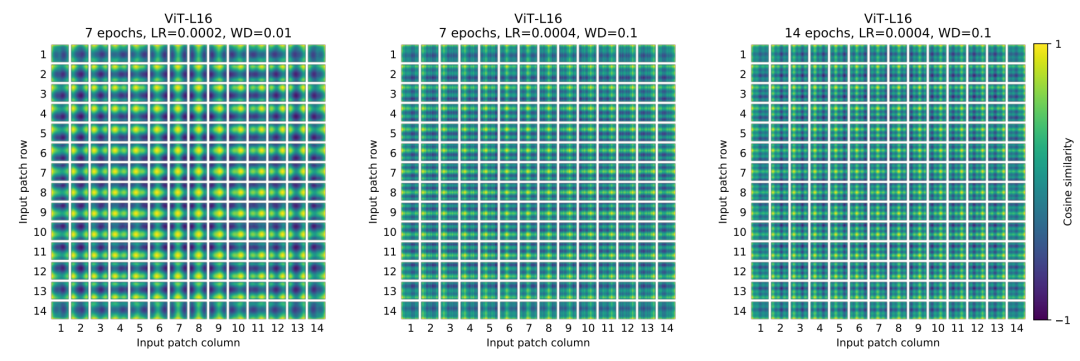
论文中也对学习到的positional embedding进行了可视化,发现相近的patchs的positional embedding比较相似,而且同行或同列的positional embedding也相近:
这里额外要注意的一点,如果改变图像的输入大小,ViT不会改变patchs的大小,那么patchs的数量会发生变化,那么之前学习的pos_embed就维度对不上了,ViT采用的方案是通过插值来解决这个问题:
def resize_pos_embed(posemb, posemb_new):
# Rescale the grid of position embeddings when loading from state_dict. Adapted from
# https://github.com/google-research/vision_transformer/blob/00883dd691c63a6830751563748663526e811cee/vit_jax/checkpoint.py#L224
_logger.info('Resized position embedding: %s to %s', posemb.shape, posemb_new.shape)
ntok_new = posemb_new.shape[1]
# 除去class token的pos_embed
posemb_tok, posemb_grid = posemb[:, :1], posemb[0, 1:]
ntok_new -= 1
gs_old = int(math.sqrt(len(posemb_grid)))
gs_new = int(math.sqrt(ntok_new))
_logger.info('Position embedding grid-size from %s to %s', gs_old, gs_new)
# 把pos_embed变换到2-D维度再进行插值
posemb_grid = posemb_grid.reshape(1, gs_old, gs_old, -1).permute(0, 3, 1, 2)
posemb_grid = F.interpolate(posemb_grid, size=(gs_new, gs_new), mode='bilinear')
posemb_grid = posemb_grid.permute(0, 2, 3, 1).reshape(1, gs_new * gs_new, -1)
posemb = torch.cat([posemb_tok, posemb_grid], dim=1)
return posemb
但是这种情形一般会造成性能少许损失,可以通过finetune模型来解决。另外最新的论文CPVT通过implicit Conditional Position encoding来解决这个问题(插入Conv来隐式编码位置信息,zero padding让Conv学习到绝对位置信息)。
Class Token
除了patch tokens,ViT借鉴BERT还增加了一个特殊的class token。后面会说,transformer的encoder输入是a sequence patch embeddings,输出也是同样长度的a sequence patch features,但图像分类最后需要获取image feature,简单的策略是采用pooling,比如求patch features的平均来获取image feature,但是ViT并没有采用类似的pooling策略,而是直接增加一个特殊的class token,其最后输出的特征加一个linear classifier就可以实现对图像的分类(ViT的pre-training时是接一个MLP head),所以输入ViT的sequence长度是。class token对应的embedding在训练时随机初始化,然后通过训练得到,具体实现如下:
# 随机初始化
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
# Classifier head
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
# 具体forward过程
B = x.shape[0]
x = self.patch_embed(x)
cls_tokens = self.cls_token.expand(B, -1, -1) # stole cls_tokens impl from Phil Wang, thanks
x = torch.cat((cls_tokens, x), dim=1)
x = x + self.pos_embed
Transformer Encoder
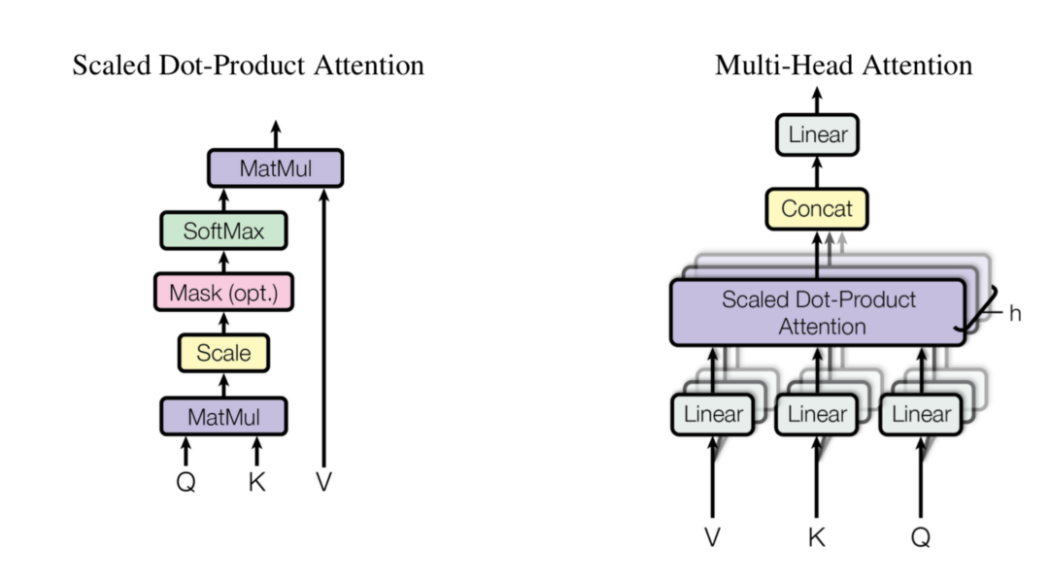
transformer最核心的操作就是self-attention,其实attention机制很早就在NLP和CV领域应用了,比如带有attention机制的seq2seq模型,但是transformer完全摒弃RNN或LSTM结构,直接采用attention机制反而取得了更好的效果:attention is all you need!简单来说,attention就是根据当前查询对输入信息赋予不同的权重来聚合信息,从操作上看就是一种“加权平均”。attention中共有3个概念:query, key和value,其中key和value是成对的,对于一个给定的query向量,通过内积计算来匹配k个key向量(维度也是d,堆积起来即矩阵),得到的内积通过softmax来归一化得到k个权重,那么对于query其attention的输出就是k个key向量对应的value向量(即矩阵)的加权平均值。对于一系列的N个query(即矩阵),可以通过矩阵计算它们的attention输出:
这里的为缩放因子以避免点积带来的方差影响。上述的Attention机制称为Scaled dot product attention,其实attention机制的变种有很多,但基本原理是相似的。如果都是从一个包含个向量的sequence()通过线性变换得到:那么此时就变成了self-attention,这个时候就有个(key,value)对,那么。self-attention是transformer最核心部分,self-attention其实就是输入向量之间进行相互attention来学习到新特征。前面说过我们已经得到图像的patch sequence,那么送入self-attention就能到同样size的sequence输出,只不过特征改变了。
更进一步,transformer采用的是multi-head self-attention (MSA),所谓的MSA就是采用定义h个attention heads,即采用h个self-attention应用在输入sequence上,在操作上可以将sequence拆分成h个size为的sequences,这里,h个不同的heads得到的输出concat在一起然后通过线性变换得到最终的输出,size也是:
MSA的计算量是和成正相关的,所以ViT的输入是patch embeddings,而不是pixel embeddings,这有计算量上的考虑。在实现上,MSA是可以并行计算各个head的,具体代码如下:
class Attention(nn.Module):
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
# 这里包含了dropout
self.proj_drop = nn.Dropout(proj_drop)
def forward(self, x):
B, N, C = x.shape
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
在transformer中,MSA后跟一个FFN(Feed-forward network),这个FFN包含两个FC层,第一个FC层将特征从维度变换成,后一个FC层将特征从维度恢复成,中间的非线性激活函数采用GeLU,其实这就是一个MLP,具体实现如下:
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
那么一个完成transformer encoder block就包含一个MSA后面接一个FFN,其实MSA和FFN均包含和ResNet一样的skip connection,另外MSA和FFN后面都包含layer norm层,具体实现如下:
class Block(nn.Module):
def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop=0., attn_drop=0.,
drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm):
super().__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(
dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
ViT
对于ViT模型来说,就类似CNN那样,不断堆积transformer encoder blocks,最后提取class token对应的特征用于图像分类,论文中也给出了模型的公式表达,其中(1)就是提取图像的patch embeddings,然后和class token对应的embedding拼接在一起并加上positional embedding;(2)是MSA,而(3)是MLP,(2)和(3)共同组成了一个transformer encoder block,共有层;(4)是对class token对应的输出做layer norm,然后就可以用来图像分类。

除了完全无卷积的ViT模型外,论文中也给出了Hybrid Architecture,简单来说就是先用CNN对图像提取特征,从CNN提取的特征图中提取patch embeddings,CNN已经将图像降采样了,所以patch size可以为。
ViT模型的超参数主要包括以下,这些超参数直接影响模型参数以及计算量:
Layers:block的数量; Hidden size D:隐含层特征,D在各个block是一直不变的; MLP size:一般设置为4D大小; Heads:MSA中的heads数量; Patch size:模型输入的patch size,ViT中共有两个设置:14x14和16x16,这个只影响计算量;
类似BERT,ViT共定义了3种不同大小的模型:Base,Large和Huge,其对应的模型参数不同,如下所示。如ViT-L/16指的是采用Large结构,输入的patch size为16x16。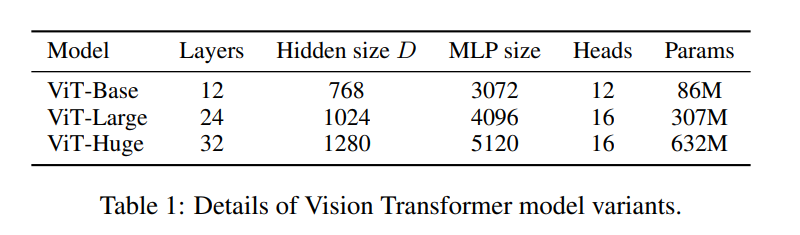
模型效果
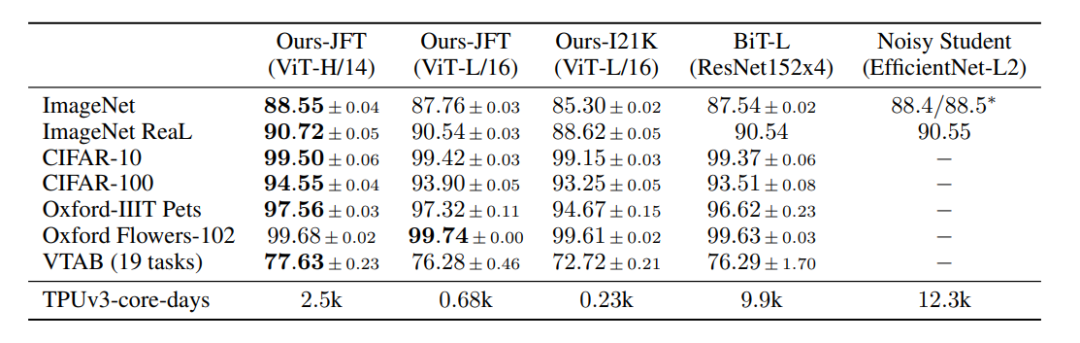
ViT并不像CNN那样具有inductive bias,论文中发现如果如果直接在ImageNet上训练,同level的ViT模型效果要差于ResNet,但是如果在比较大的数据集上petraining,然后再finetune,效果可以超越ResNet。比如ViT在Google私有的300M JFT数据集上pretrain后,在ImageNet上的最好Top-1 acc可达88.55%,这已经和ImageNet上的SOTA相当了(Noisy Student EfficientNet-L2效果为88.5%,Google最新的SOTA是Meta Pseudo Labels,效果可达90.2%):
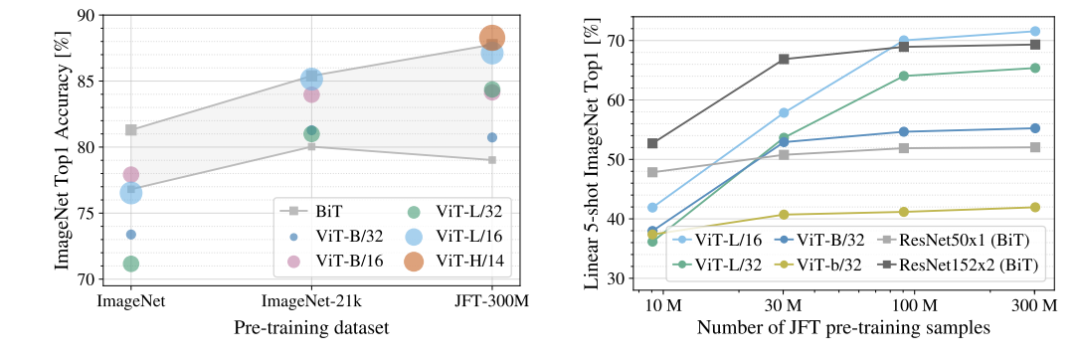
那么ViT至少需要多大的数据量才能和CNN旗鼓相当呢?这个论文也做了实验,结果如下图所示,从图上所示这个预训练所使用的数据量要达到100M时才能显示ViT的优势。transformer的一个特色是它的scalability:当模型和数据量提升时,性能持续提升。在大数据面前,ViT可能会发挥更大的优势。
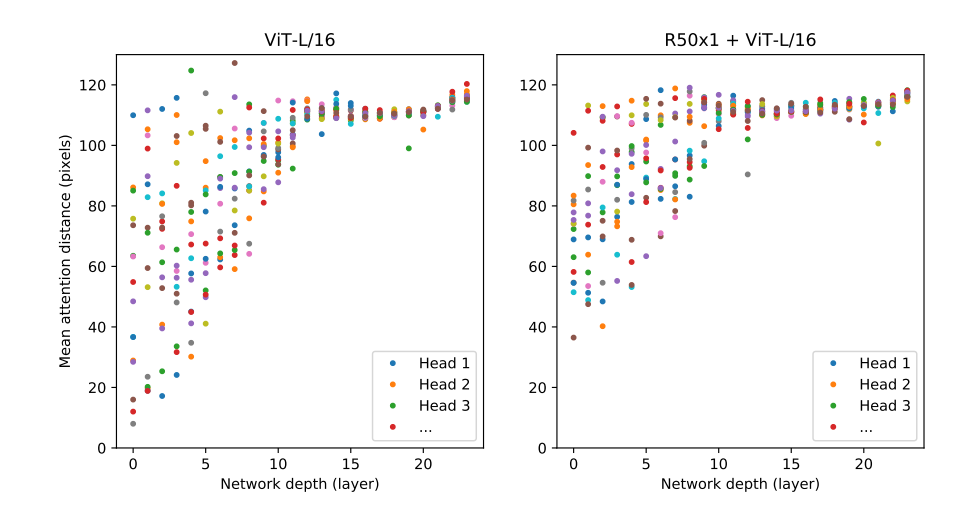
此外,论文中也对ViT做了进一步分析,如分析了不同layers的mean attention distance,这个类比于CNN的感受野。论文中发现前面层的“感受野”虽然差异很大,但是总体相比后面层“感受野”较小,而模型后半部分“感受野”基本覆盖全局,和CNN比较类似,说明ViT也最后学习到了类似的范式。
当然,ViT还可以根据attention map来可视化模型具体关注图像的哪个部分,从结果上看比较合理:
我个人觉得ViT算是一个很好的开始,虽然ViT也有一些问题,但是至少证明了纯粹的transformer在CV领域应用的可能性。近期也有一些后续的改进工作,感兴趣的可以进一步了解:
[DeiT] Training data-efficient image transformers & distillation through attention [T2T-ViT] Tokens-to-Token ViT: Training Vision Transformers from Scratch on ImageNet [CPVT] Do We Really Need Explicit Position Encodings for Vision Transformers? [PVT] Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions [TNT] Transformer in Transformer
参考
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale timm Awesome-Visual-Transformer Do We Really Need Explicit Position Encodings for Vision Transformers?
推荐阅读
谷歌提出Meta Pseudo Labels,刷新ImageNet上的SOTA!
涨点神器FixRes:两次超越ImageNet数据集上的SOTA
CondInst:性能和速度均超越Mask RCNN的实例分割模型
mmdetection最小复刻版(十一):概率Anchor分配机制PAA深入分析
MMDetection新版本V2.7发布,支持DETR,还有YOLOV4在路上!
无需tricks,知识蒸馏提升ResNet50在ImageNet上准确度至80%+
不妨试试MoCo,来替换ImageNet上pretrain模型!
mmdetection最小复刻版(七):anchor-base和anchor-free差异分析
mmdetection最小复刻版(四):独家yolo转化内幕
机器学习算法工程师
一个用心的公众号
