
基于光流的3D速度检测
共 1212字,需浏览 3分钟
· 2020-10-26
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
假设我们有两个图像I和J,它们之间有一个小的转换,可以表示如下。

其中,I(x)和J(x)可以看作是一个映射函数,其中像素位置x为自变量,像素灰度为因变量。这两个图像。我们从优化的角度考虑这个问题,如下

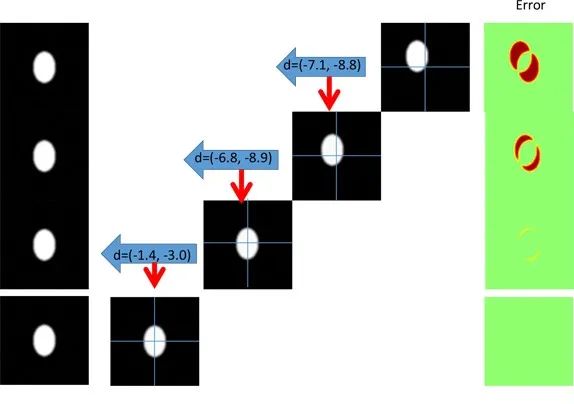
通过连续地调整该二维平移d,J和I之间的差异被最小化。
为了解决这个问题,我们首先求解目标函数相对于自变量的导数,可以得到以下公式。
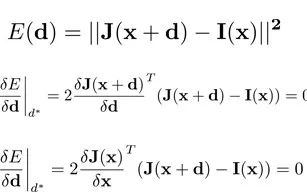
接下来,我们采用J(x + d)的一阶泰勒展开式,然后将其简化为误差函数的导数,如下所示:

最后,必须添加这些错误以获得总错误。

经过迭代计算,我们可以收敛到最终结果。
两个帧之间相应点的光流关系可用于估计3D速度。
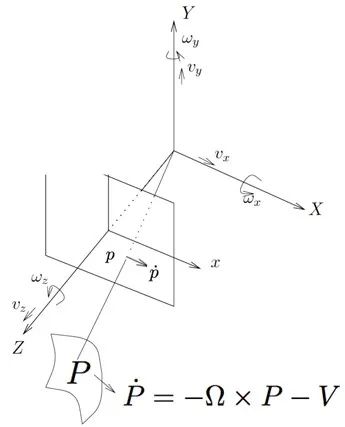
其中,点p是使用校准相机的投影方程式从3D点P在图像平面上的投影。
或矢量记法

区分wrt时间收益:

光流场矢量可以分为平移部分和旋转部分,如下所示:
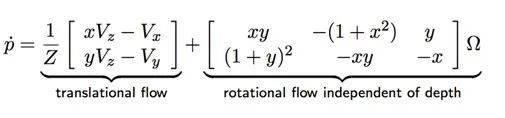
如果存在3个非共线的光流向量和深度,则可以求解3D速度。
通过将翻译部分跨越的线相交,我们可以获得扩展焦点(FOE),也称为Epipole:

我们可以如下设置碰撞时间

与FOE处于相同径向距离的点的流动矢量长度与反深度成比例。
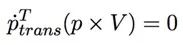
我们可以获得以下共面条件
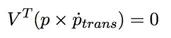
这表示像点,流量和线速度都在同一平面上。
我们可以从两点获得V:

从n个点得到一个齐次系统
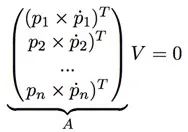
V是A的零空间,可以从SVD获得。
对于平移和旋转情况,我们可以重写:

可以线性写成反深度和Ω。
对于n点,我们可以写出一个方程组。
对于Φ,矩阵是2N x(N + 3)矩阵,并且是V的函数。
如果我们求解反深度和Ω的未知矢量,则会得到。
我们可以将其插入目标函数中。
在球上搜索得到V:
参考文献
Robotics: Perception Coursera ,Université de Pennsylvanie
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~