
旋转式光电编码器工作原理及在视觉检测中的使用
一、光电编码器工作原理
光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。为了判断旋转方向,码盘还可提供相位相差90度的A相、B相两路脉冲信号。码盘上还有一个Z相标志,每转一圈输出一个Z相脉冲。
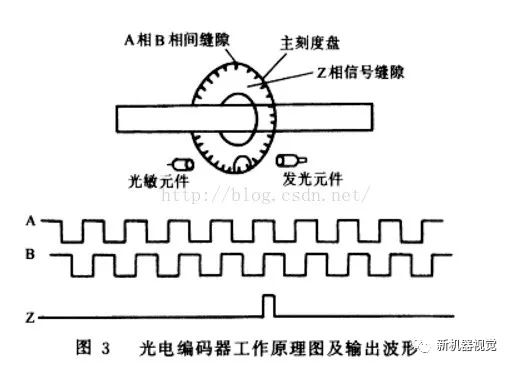
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1,增量式编码器
增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。在接合数字电路特别是单片机后,增量式旋转编码器在角度测量和角速度测量较绝对式旋转编码器更具有廉价和简易的优势。
下面对增量式旋转编码器的内部工作原理(附图)
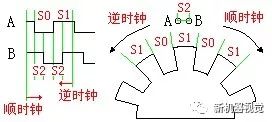
A,B两点对应两个光敏接受管,A,B两点间距为 S2 ,角度码盘的光栅间距分别为S0和S1。
当角度码盘以某个速度匀速转动时,那么可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理角度码盘以其他的速度匀速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。如果角度码盘做变速运动,把它看成为多个运动周期(在下面定义)的组合,那么每个运动周期中输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
通过输出波形图可知每个运动周期的时序为

我们把当前的A,B输出值保存起来,与下一个A,B输出值做比较,就可以轻易的得出角度码盘的运动方向,
如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,除以所消毫的时间,就得到此次角度码盘运动位移角速度。
S0等于S1时,且S2等于S0的1/2时,1/4个运动周期就可以得到运动方向位和位移角度,如果S0不等于S1,S2不等于S0的1/2,那么要1个运动周期才可以得到运动方向位和位移角度了。
另外,增量式编码器除了输出A相、B相两组方波脉冲外,还有会输出一组Z相脉冲。Z相为每转一个脉冲,用于基准点定位。这在伺服电机准确找到原点时会非常有用。
2,绝对式编码器
绝对式编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:1.可以直接读出角度坐标的绝对值;2.没有累积误差;3.电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。
绝对式编码器为每一个轴的位置提供一个独一无二的编码数字值。特别是在定位控制应用中,绝对值编码器减轻了电子接收设备的计算任务,从而省去了复杂的和昂贵的输入装置:而且,当机器合上电源或电源故障后再接通电源,不需要回到位置参考点,就可利用当前的位置值。
单圈绝对值编码器把轴细分成规定数量的测量步,最大的分辨率为13位,这就意味着最大可区分8192个位置+多圈绝对值编码器不仅能在一圈内测量角位移,而且能够用多步齿轮测量圈数。多圈的圈数为12位,也就是说最大4096圈可以被识别。总的分辨率可达到25位或者33,554,432个测量步数。并行绝对值旋转编码器传输位置值到估算电子装置通过几根电缆并行传送。假设串行绝对值编码器,输出数据可以用标准的接口和标准化的协议传送,同时在过去点对点的连接实现了串行数据传送。
单圈绝对式编码器,以转动中测量光码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码器只能用于旋转范围360度以内的测量,称为单圈绝对式编码器。
如果要测量旋转超过360度范围,就要用到多圈绝对式编码器。编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。多圈式绝对编码器在长度定位方面的优势明显,已经越来越多地应用于工控定位中。
二、光电编码器在视觉检测中的应用
在视觉检测中,光电编码器常用来作为线阵相机在运动检测过程中的触发信号。编码器有自己的输出频率如1000/r、2000/r等,通过倍频/分频得到相机需要的脉冲频率,从而触发相机采集图像。使用编码是为了同步物体或相机的运动速度,使得相机的纵向放大倍率和横向放大率一致(这是理想情况,实际上达不到完全一致,线阵相机采集的图像需要通过图像标定来校正横向放大倍率和纵向放大倍率的误差)。
根据相机的横向分辨率(HR)、横向视野(HFOV)、编码器输出脉冲频率(F)、编码器与检测物体接触的外接转轮半径(R)等这些参数可以计算出触发相机的频率转换系数(FR),并设置相应的相机参数。以basler 线阵相机为例,假设光电编码器输出A、B两相(A+、A--、B+、B--),而如果相机中的频率转换器(frequency converter)选择忽略“脉冲方向”和“上升下降沿”,则相机捕获到的编码器输出频率是其输出A、B相信号频率的4倍,即4F。这样有:
相机的纵向放大倍率为: VPM = 4F / ( 2 * PI * R )
相机的横向放大倍率为: HPM = HR / HFOV
相机的频率转换因子为:FR = HPM / VPM
利用FR设置频率转换器(frequency converter)中的preDivider、Multiplier、postDivider等参数,使得相机的横向和纵向放大倍率尽可能接近。前面说过通过这样的设置,二者不可能完全一致,还需要通过相机标定到达精度要求。
三,光电编码器使用注意事项
1,由于编码器与检测物体直接摩擦传动,如果物体震动过大对编码器有损坏,应采取缓冲或间接传动;
2,编码器信号易受外界电磁环境干扰,丢失脉冲。因此编码器信号传输距离不宜过长,传输线使用双绞屏蔽线,屏蔽线必须接地。
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
