
略析欧洲航天局ERA机械臂

北京呼风唤雨文化传媒有限公司
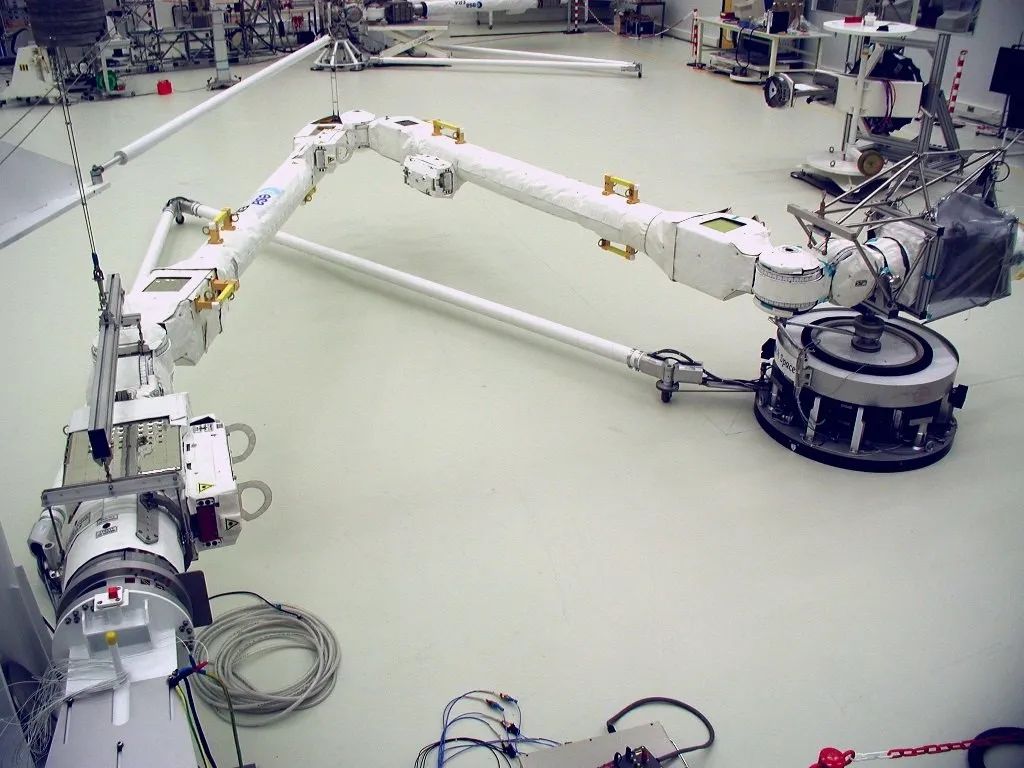
 准备与科学号实验舱整合的ERA机械臂
准备与科学号实验舱整合的ERA机械臂简介
性能指标

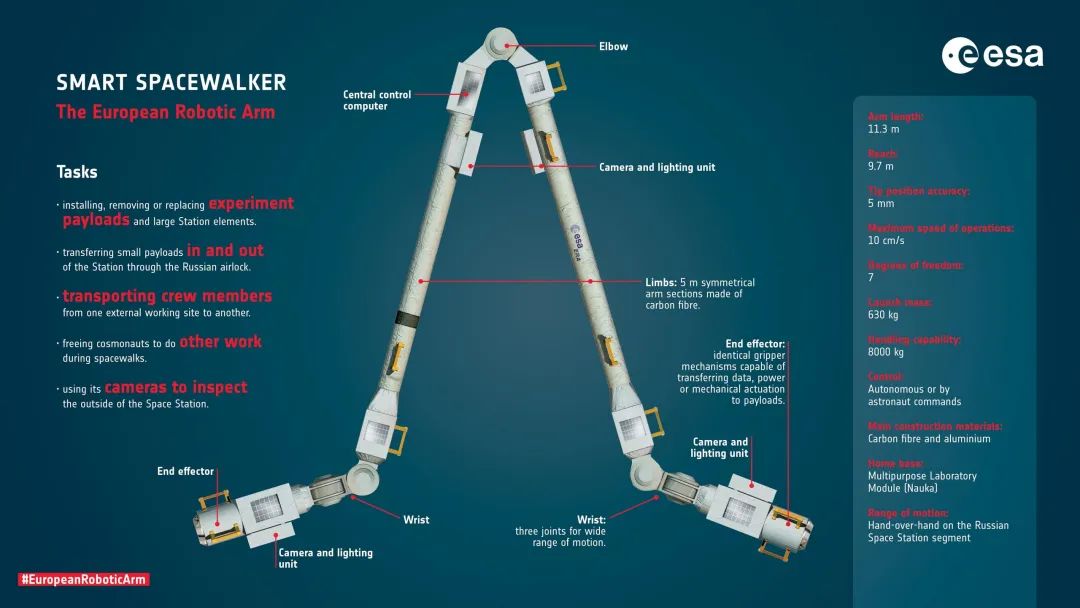
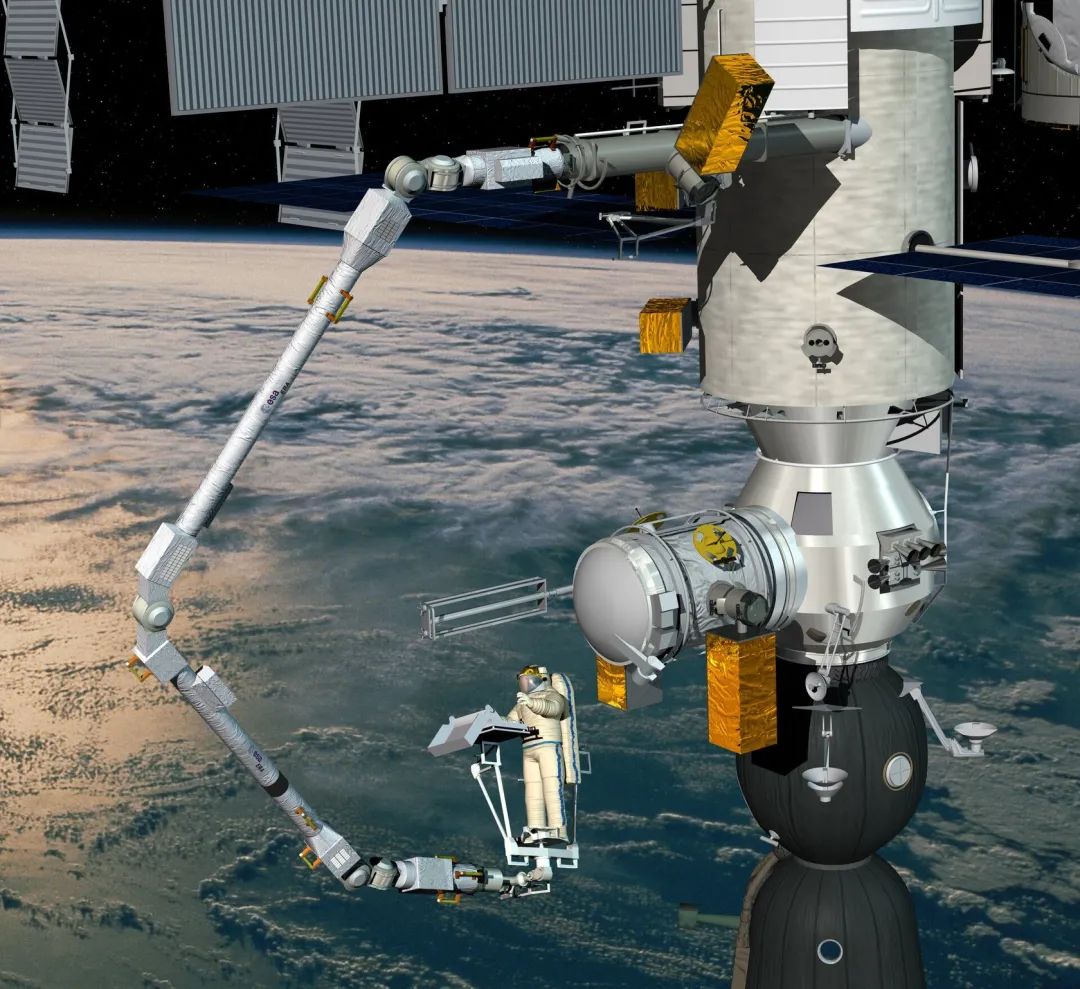
新机械臂(ERA)仅重 630kg,由于其轻质的铝和碳纤维结构,机械臂将能够移动和安装 约8000 kg重量的组件。同时能够以 5mm的末端定位精度到达遇到目标。新的机械臂将为国际空间站俄罗斯部分提供服务,机械臂加装脚限位器后将扩展航天员出舱活动范围,辅助加成的提高EVA工作效率。航天员能够从科学号实验舱内部实时控制手臂,或者对其进行预编程以自主执行任务。手臂中间还有一个内置中控的计算机,太空行走过程中的航天员可以通过设备操控其在EVA期间输入指令。
欧洲机械臂(ERA)性能指标
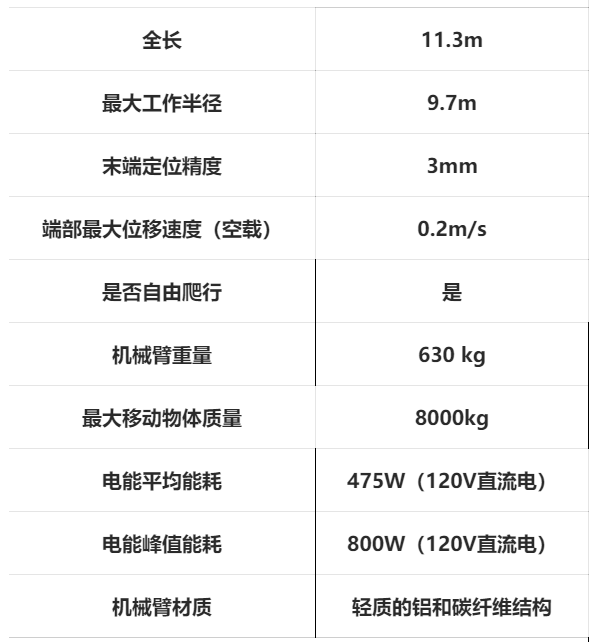
(航天爱好者网制表)


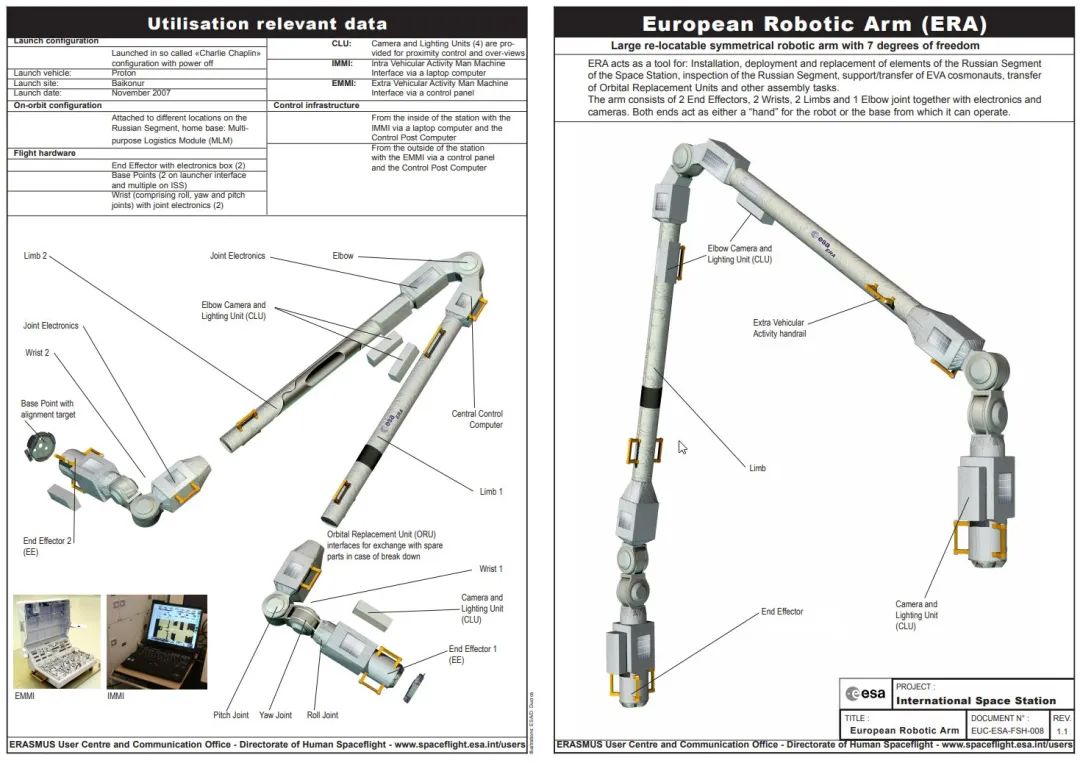
ERA主要用于在轨装配和其他舱外服务,在运行控制方面主要有3个单元组成:
1、摄像照明单元(CLU);
2、中控设备单元;
3、避撞系统单元;
机械臂4部配备了红外摄像机,每个摄相机配备一个照明装置。可以监控空间站设备与机械臂自身状况,并将其视图传输给科学号实验舱内进行机械臂操作的航天员与地面控制指挥中心。
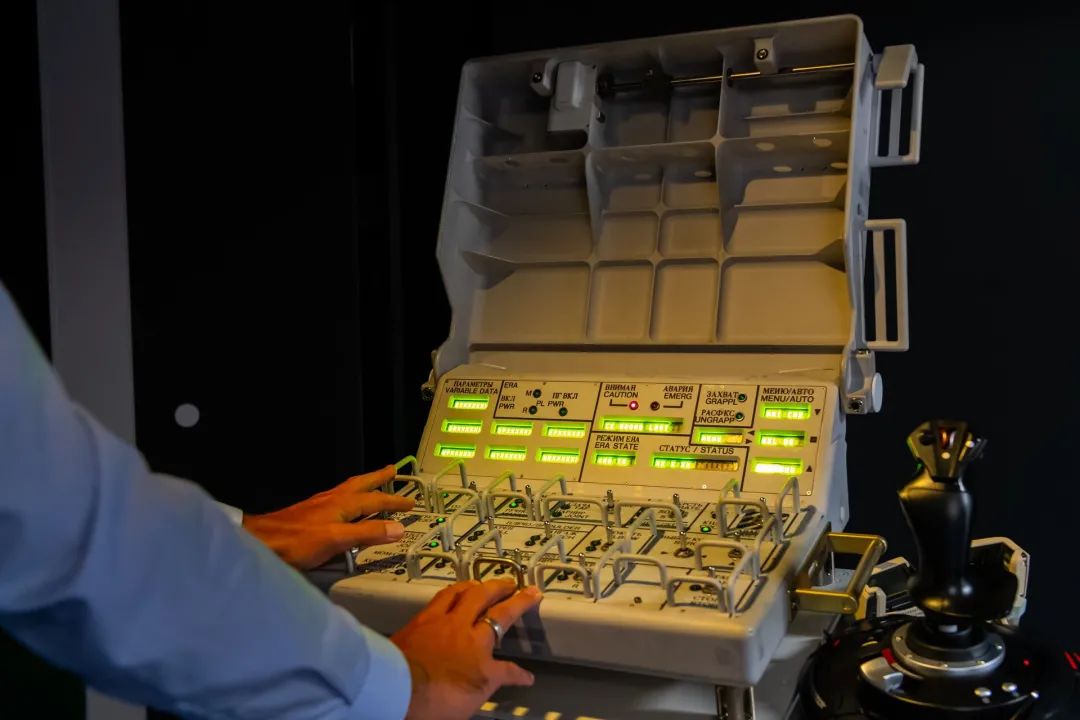
机械臂中控系统主要用于航天员舱外活动时对机械臂进行有效控制。该设备是随着ERA项目一同开发的(经过十多年的等待,该套控制设备实际上已经老旧,不过还是能满足航天员在轨的控制使用)。其终端的主要部件包括航天员使用机械式电脑与笔记本电脑操控的机械臂舱内操控设备与舱外航天员控制设备等。
机械臂避撞系统通过中控系统的三维几何模型实时计算机械臂操作过程的风险系数,确保机械臂自身与国际空间站的安全运行,避免出现误操作机械臂损伤出舱任务的空间站舱段。
载人航天机械臂同行情况

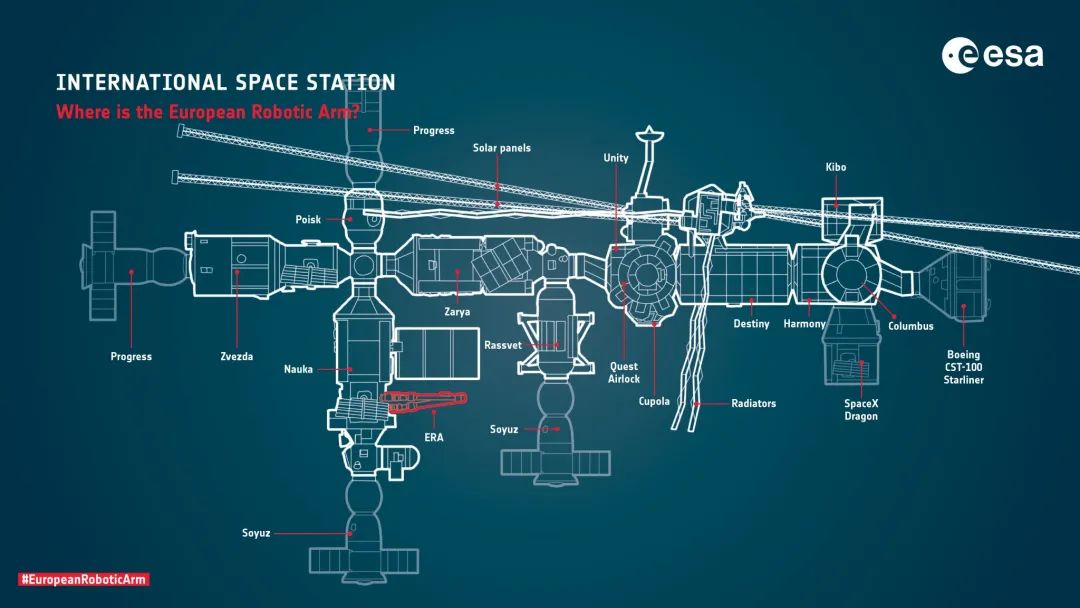
国际空间站已经使用过三种四台太空机械臂:【1】美国航天飞机上携带,配合加拿大机械臂2号进行舱段组装的15.3米长的加拿大1号机械臂(已退役)、【2】国际空间站桁架上现有17.6米长的加拿大机械2号臂、【3】希望号实验舱处9.9米长的日本希望号实验舱统机械臂、【4】桁架处加拿大灵巧号(Dextre)专用灵巧操作机械臂(与加拿大机械配合使用)。
但是,这些机械臂实际上都在欧美舱段的大型桁架附近, 虽然2011年航天飞机STS-134任务中航天员通过第三次EVA在美国出资的俄罗斯曙光号功能舱额外加装了一个加拿大机械臂2号的适配器PDGF,且俄罗斯黎明号小型试验/气闸舱舱在地面阶段就安装有加拿大机械臂臂2号的适配器,能到达俄舱段,但是俄罗斯现役的联盟/进步飞船都能自主交会对接,不需要加拿大机械臂辅助对接,且因为国际空间站基本完成组装阶段,加上俄方缺少实验舱等因素,也没有大型货物要用借助加拿大机械臂2号机械臂搬运。因此,这些年俄方没有使用加拿大机械臂2 号。
而俄罗斯舱段目前只有一根辅助杆,功能也只是单纯的辅助航天员执行EVA任务,扩展航天员活动范围。
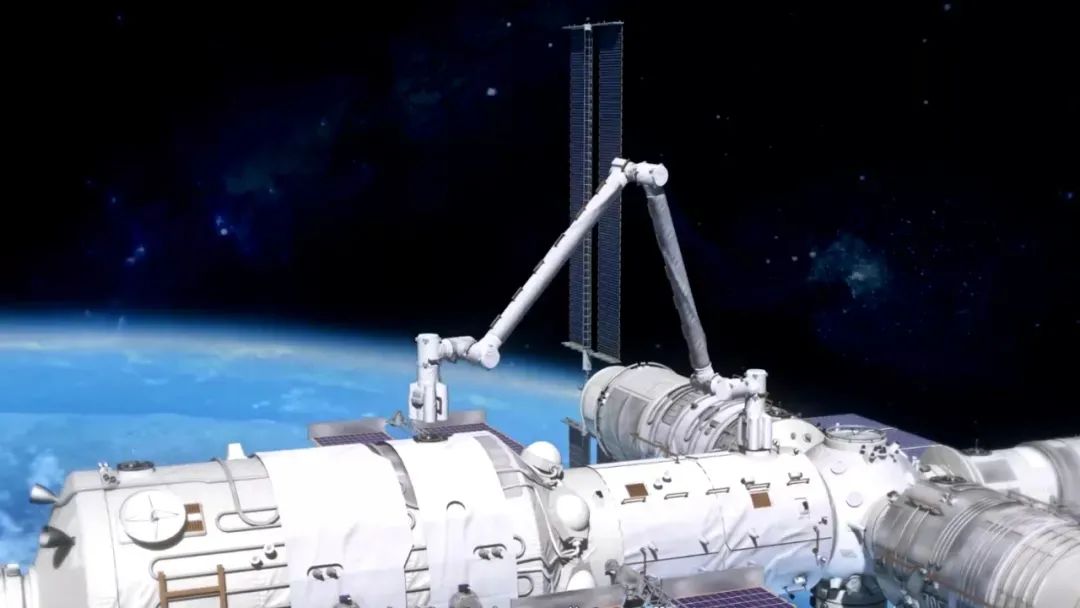
此外中国天和核心舱也使用了全长10米的机械臂,未来可扩展至15米,实验舱建设阶段还将试验一根小型机械臂执行实验舱“搬家”任务,核心舱机械臂目前由7个关节、2根臂杆、2套延长件、2套末端执行器及相机、1套中央控制器及肘部相机组成,负载能力为25吨,末端定位精度为45毫米。
本文转载自“航天爱好者网”,原标题《略析欧洲航天局ERA机械臂》,文 | 冬天的一D锅
为分享前沿资讯及有价值的观点,卫星与网络微信公众号转载此文,并经过编辑。
支持保护知识产权,转载请注明原出处及作者。
部分图片难以找到原始出处,故文中未加以标注,如若侵犯了您的权益,请第一时间联系我们。


· 卫星与网络微信公众号(ID:satnetdy)团队

