
实操教程|用CNN实现全景图像语义分割!
极市导读
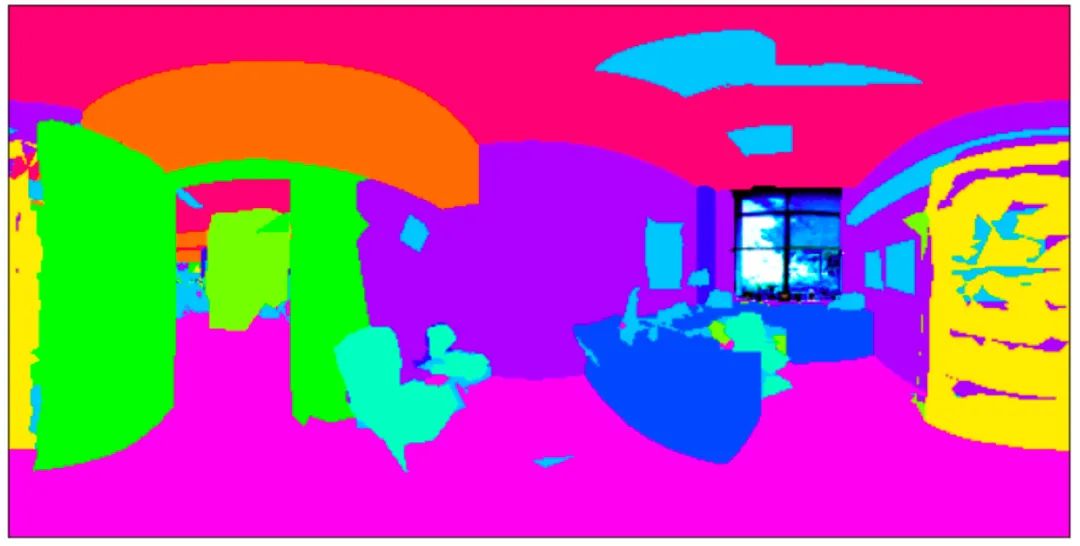
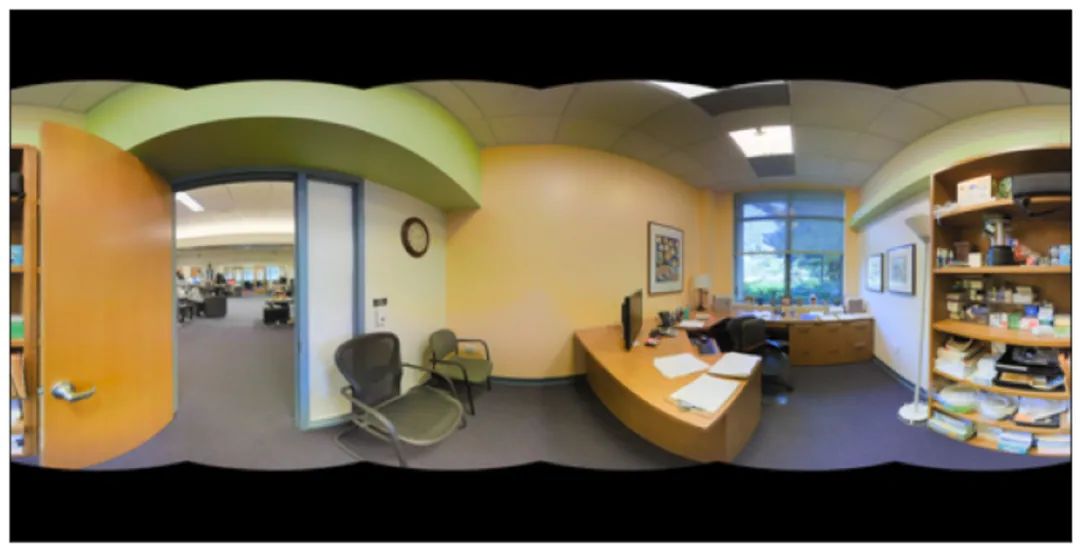
本文手把手带你实践一个有趣的应用——全景图像语义分割,使用多种传统CNN方法和球面CNN方法进行对比。如下图所示,全景图分割实例像素级别分类,每种实例对应一个标签。完成本教程后,你将能够做一个图中所示的全景图小应用。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
相信许多读者体验过b站上的全景视频,如果还没有,快来体验一下吧[1]!只需鼠标点击并移动,便可360度无死角的浏览全景视频,让人如同身临其境。全景图像,又称360°全景图,其数据分布在球面空间上。但是,当我们将全景图像展开时,会造成畸变。
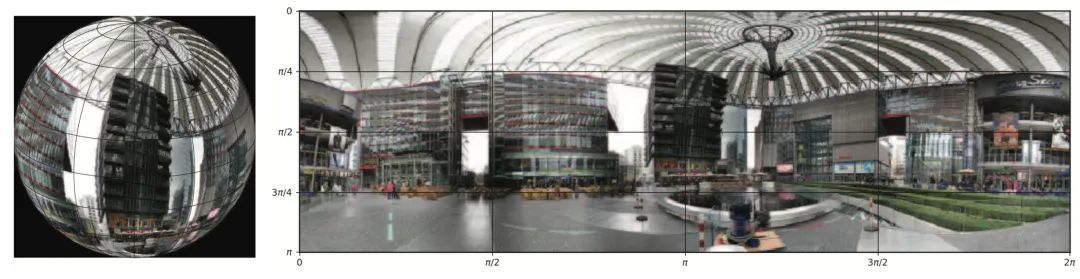
怎么处理?直接将传统二维平面图像处理方法应用到球面数据上,其效果则会大大降低。而要解决分布在球面空间上的数据,需要特定的方法,比如球面卷积网络。本文手把手带你实践一个有趣的应用——全景图像语义分割,使用多种传统CNN方法和球面CNN方法进行对比。如下图所示,全景图分割实例像素级别分类,每种实例对应一个标签。完成本教程后,你将能够做一个图中所示的全景图小应用。
文章数据集获取与代码地址见文末。
1. 环境构建
基于深度学习的编程环境往往有各种复杂的环境依赖,而各种安装报错总是消磨我们的时间,其实之一过程可以大大缩短。我们所需要的也就是通过一个命令安装所有的依赖并打开环境
make up #等价于 docker-compose up -d
再通过一个命令
make in
来进入我们需要的环境,然后运行程序。为实现构建这一过程,基于docker –docker-compose – make来搭建我们的环境,其原理如下图所示:
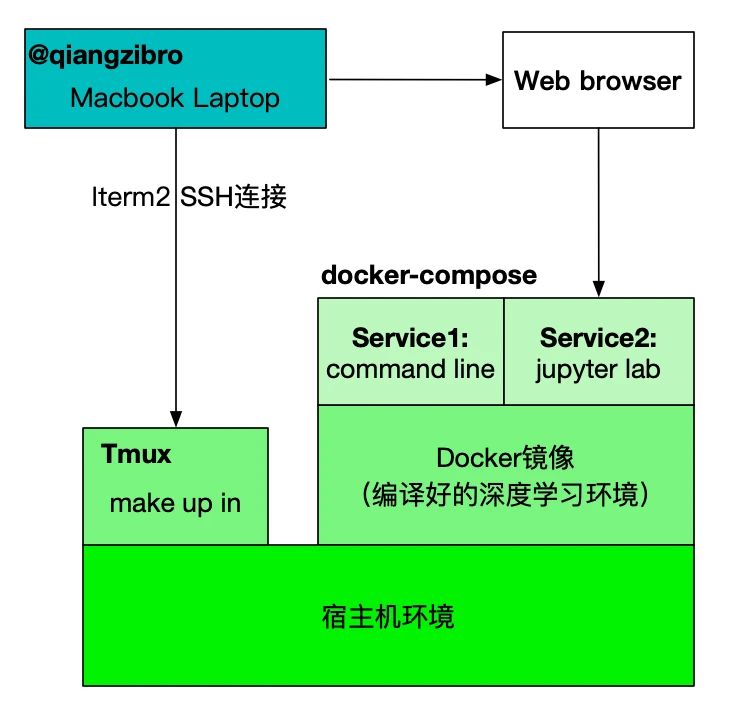
docker –docker-compose – make三个工具对应三个配置文件,都在项目根目录进行了声明:
Dockerfiledocker-compose.ymlMakefile
其中
Dockerfile定义了实验所需要的所有环境,依据此文件可以编译成docker镜像,其中包含我们需要的库docker-compose.yml定义了镜像的启动方式,在本文中,我们定义两个服务,一个作为终端来运行命令,一个作为jupyter lab供调试Makefile定义了启动环境的方式
本文实验环境:Ubuntu20.04,CUDA11.0,Pytorch1.7
Docker安装
# 1.安装dockersudo apt install -y docker docker.io# 2.安装英伟达dockerdistribution=$(. /etc/os-release;echo $ID$VERSION_ID) \&& curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \&& curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.listsudo apt-get updatesudo apt-get install -y nvidia-docker2# 3.安装docker-compose(apt常常不能安装最新版本的docker-compose)pip install docker-compose# 4.解决linux下docker的权限问题,将用户放在docker组里GROUPNAME=dockergetent group $GROUPNAME 2>&1 >/dev/null || groupadd $GROUPNAMEsudo usermod -aG docker $(whoami)# 5.重启sudo systemctl daemon-reloadsudo systemctl restart docker
使用Docker镜像
Docker镜像构建好之后,可以直接运行docker命令启动镜像,但是这样不是最方便的。使用docker-compose搭配Makefile,具体操作如下:首先写好docker-compose.yml启动文件,可参考本项目对应的docker-compose.yml,接着,在Makefile里写常见docker相关命令,我们将应用分为启动(up)、关闭(down)、进入容器环境(in)三个需求,Makefile如下:
up: docker-compose up -ddown: docker-compose downin: docker-compose exec spherical-env bash
本项目镜像已上传dockerhub,可以直接使用下列命令下载
docker pull qiangzibro/spherical_image_segmentation# 或者使用下面命令自己编译make build
接着,一键完成编译、启动
make up #等价于 docker-compose up -d
再通过下列命令便可以进入终端
make in
使用docker-compose logs可以看到notebook对应的网址
2. 数据获取
使用2D-3D-S 数据集进行本实验,该数据集提供了来自 2D、2.5D 和 3D 域的各种相互注册的数据,以及实例级语义和几何注释。它收集在来自 3 座不同建筑的 6 个大型室内区域。它包含超过 70,000 张 RGB 图像,以及相应的深度、表面法线、语义注释、全局 XYZ 图像(均以常规和 360° 等距柱状图图像的形式)以及相机信息。它还包括注册的原始和语义注释 3D 网格和点云。
数据集从开源数据集网站格物钛获取,这个网站汇总了AI开发者常见的公开数据集,用户可以对数据集进行可视化预览、在线使用和下载等操作。
这里我们不用下载,可以直接通过SDK读取数据集,操作步骤如下:a. 打开本文对应数据集链接 https://gas.graviti.cn/dataset/qiangzibro/spherical_segmentationb. 右上角注册登录
c. fork数据集
d. 点击网页上方开发者工具,获取使用SDK所需的AccessKey,获取到 AccessKey 后,将其存在项目根目录的gas_key.py里。
KEY = "<Your-Key>"
然后即可以通过AccessKey可以上传数据、读取数据、使用数据,灵活对接模型开发和训练,与数据pipeline快速集成。
 e. AccessKey写入后就可以写代码读取数据了。
e. AccessKey写入后就可以写代码读取数据了。
from PIL import Imagedataset = Dataset("DatasetName", gas)segment = dataset[0]for data in segment: with data.open() as fp: image = Image.open(fp) width, height = image.size image.show()
3. 方法
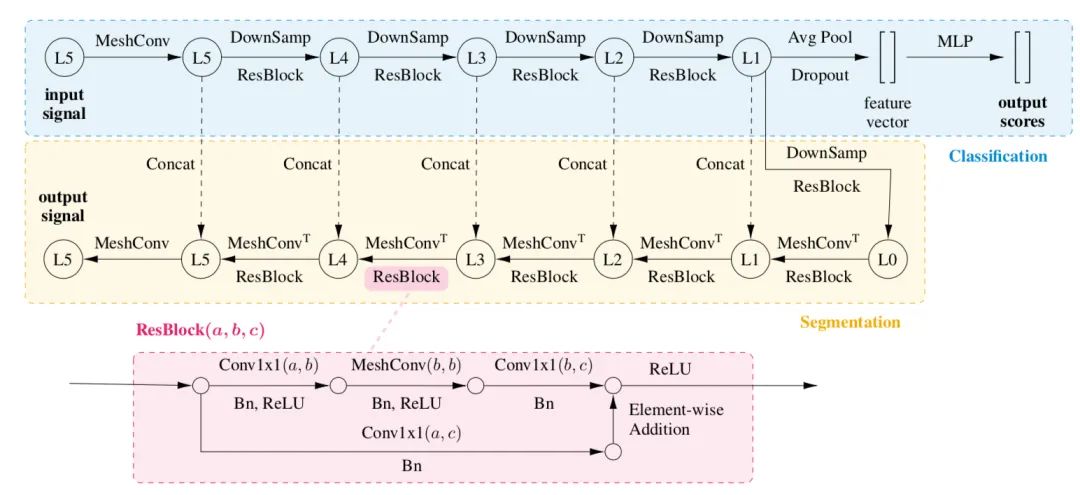
使用多种二维CNN方法和球面卷积方法UGSCNN。其中,二维CNN有三种:UNet、ResNet和FCN;UGSCNN[3]参考自论文《Spherical CNNs on Unstructured Grids》,下面着重看一下UGSCNN的方法。MeshConv对卷积算子进行定义:
class MeshConv(_MeshConv): def __init__(self, in_channels, out_channels, mesh_file, stride=1, bias=True): super(MeshConv, self).__init__(in_channels, out_channels, mesh_file, stride, bias) pkl = self.pkl if stride == 2: self.nv_prev = pkl['nv_prev'] L = sparse2tensor(pkl['L'].tocsr()[:self.nv_prev].tocoo()) # laplacian matrix V->V F2V = sparse2tensor(pkl['F2V'].tocsr()[:self.nv_prev].tocoo()) # F->V, #V x #F else: # stride == 1 self.nv_prev = pkl['V'].shape[0] L = sparse2tensor(pkl['L'].tocoo()) F2V = sparse2tensor(pkl['F2V'].tocoo()) self.register_buffer("L", L) self.register_buffer("F2V", F2V) def forward(self, input): # compute gradient grad_face = spmatmul(input, self.G) grad_face = grad_face.view(*(input.size()[:2]), 3, -1).permute(0, 1, 3, 2) # gradient, 3 component per face laplacian = spmatmul(input, self.L) identity = input[..., :self.nv_prev] grad_face_ew = torch.sum(torch.mul(grad_face, self.EW), keepdim=False, dim=-1) grad_face_ns = torch.sum(torch.mul(grad_face, self.NS), keepdim=False, dim=-1) grad_vert_ew = spmatmul(grad_face_ew, self.F2V) grad_vert_ns = spmatmul(grad_face_ns, self.F2V) feat = [identity, laplacian, grad_vert_ew, grad_vert_ns] out = torch.stack(feat, dim=-1) out = torch.sum(torch.sum(torch.mul(out.unsqueeze(1), self.coeffs.unsqueeze(2)), dim=2), dim=-1) out += self.bias.unsqueeze(-1) return out
分割网络基于MeshConv算子构建了一个Unet网络:
4. 训练
环境构建好后只需简单的几个命令便可以运行起来
 再使用
再使用make in成功进入到容器终端
基于CNN对网格进行分割
cd cnns# 基于./run.sh UNet# 基于FCN./run.sh FCN8s# 基于ResNetDUCHDC./run.sh ResNetDUCHDC
脚本run.sh解释
# Model choice# ResNetDUCHDC,FCN8s,UNet# Run example# 1) ./run.sh# 2) ./run.sh FCN8s# 3) ./run.sh ResNetDUCHDCmodel="${1:-UNet}"MESHFILES=../data/mesh_filesDATADIR=../data/2d3ds_pano_small/# create log directorymkdir -p logspython train.py \--batch-size 16 \ # 训练批量大小--test-batch-size 16 \ #测试批量大小--epochs 200 \ # 训练epoch数量--data_folder $DATADIR \--mesh_folder $MESHFILES \ # 正二十面体网格文件位置--fold 3 \ # K-fold交叉验证,k=3。将原始数据分成K组(K-Fold),将每个子集数据分别做一次验证集,其余的K-1组子集数据作为训练集,这样会得到K个模型。这K个模型分别在验证集中评估结果,最后的误差MSE(Mean Squared Error)加和平均就得到交叉验证误差。交叉验证有效利用了有限的数据,并且评估结果能够尽可能接近模型在测试集上的表现,可以做为模型优化的指标使用。--log_dir logs/log_${model}_f16_cv3_rgbd \ # 日志目录--decay \ # 学习率衰减--train_stats_freq 5 \--model ${model} \ #模型选择--in_ch rgbd \ # 输入数据通道--lr 1e-3 \ # 学习路--feat 16 #特征层的数量
基于UGSCNN对球面数据进行分割
cd ugscnn./run.sh
训练200个epoch后,可得如下结果:

5. 测试
使用提供的测试脚本test.sh即可进行测试
# 基于UNet./test.sh UNet# 基于FCN./test.sh FCN8s# 基于ResNetDUCHDC./test.sh ResNetDUCHDC
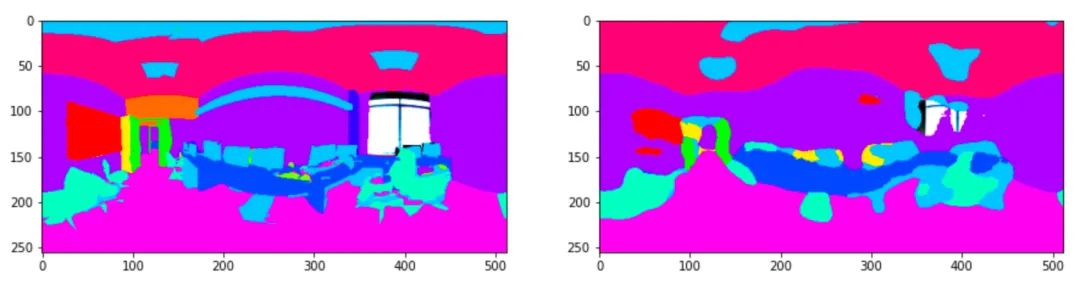
测试结果保存在当前目录下,命名格式为模型名+.npz,将其打开进行结果分析,如下所示。全景图实例:
结果:
总结
本文介绍了docker作为环境构建的知识,介绍几种基于传统CNN方法和一种基于球面CNN的方法,并将上述方法在全景数据集上完成了分割任务。数据集地址(代码上传在数据集讨论区):https://gas.graviti.cn/dataset/datawhale/SphericalSegmentation
参考资料
[ 1 ] : https://www.bilibili.com/video/BV1NT4y1w7cy?from=search&seid=10079355191633664125
[ 2 ] : https://mp.weixin.qq.com/s/RZqa9aNgK--7pnkJHV1cAw
[ 3 ] : https://www.graviti.cn/
[ 4 ] : https://github.com/maxjiang93/ugscnn/
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“CVPR21检测”获取CVPR2021目标检测论文下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~
