
电子通信的SPI通信协议的基础
关注、星标公众号,直达精彩内容
文章来源:https://www.circuitbasics.com/basics-of-the-spi-communication-protocol/
整理:技术让梦想更伟大 | 李肖遥
SPI,I2C和UART
SPI简介
1、SPI特点
(1)采用主-从模式(Master-Slave) 的控制方式
(2)采用同步方式(Synchronous)传输数据
(3)数据交换(Data Exchanges)
(4)SPI有四种传输模式
(5)SPI只有主模式和从模式之分。
(1)概述
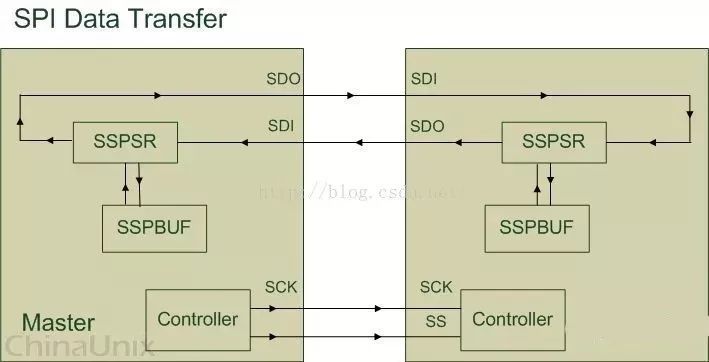
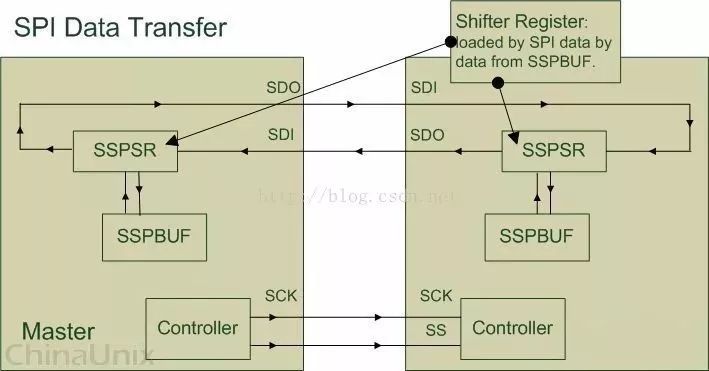
SSPSR, Synchronous Serial Port Register, 泛指 SPI 设备里面的移位寄存器(Shift Regitser), 它的作用是根据设置好的数据位宽(bit-width) 把数据移入或者移出 SSPBUF;
Controller, 泛指 SPI 设备里面的控制寄存器, 可以通过配置它们来设置 SPI 总线的传输模式。
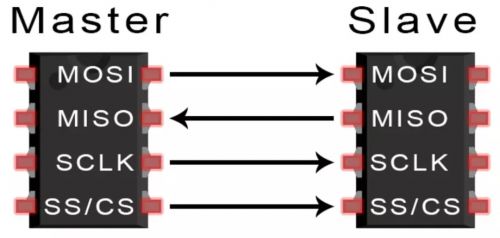
通常情况下, 我们只需要对上图所描述的四个管脚(pin) 进行编程即可控制整个 SPI 设备之间的数据通信:
SCK, Serial Clock, 主要的作用是 Master 设备往 Slave 设备传输时钟信号, 控制数据交换的时机以及速率;
SDO/MOSI, Serial Data Output/Master Out Slave In, 在 Master 上面也被称为 Tx-Channel, 作为数据的出口, 主要用于 SPI 设备发送数据;
SPI 设备在进行通信的过程中, Master 设备和 Slave 设备之间会产生一个数据链路回环(Data Loop), 就像上图所画的那样, 通过 SDO 和 SDI 管脚, SSPSR 控制数据移入移出 SSPBUF, Controller 确定 SPI 总线的通信模式, SCK 传输时钟信号。
(2) Timing
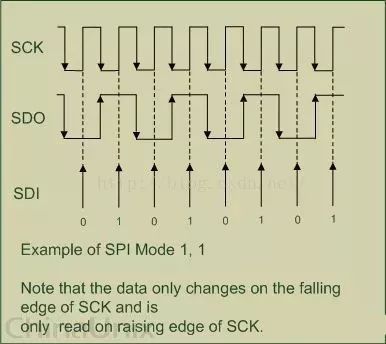
首先, 在这里解释一下相位和极性的概念
(1) CKPOL (Clock Polarity) = CPOL = POL = Polarity = (时钟)极性
(2) CKPHA (Clock Phase) = CPHA = PHA = Phase = (时钟)相位
(3) SCK=SCLK=SPI的时钟
(4) Edge=边沿,即时钟电平变化的时刻,即上升沿(rising edge)或者下降沿(falling edge)
对于一个时钟周期内,有两个edge,分别称为:
Leading edge=前一个边沿=第一个边沿,对于开始电压是1,那么就是1变成0的时候,对于开始电压是0,那么就是0变成1的时候;
Trailing edge=后一个边沿=第二个边沿,对于开始电压是1,那么就是0变成1的时候(即在第一次1变成0之后,才可能有后面的0变成1),对于开始电压是0,那么就是1变成0的时候;
b,SPI的相位和极性
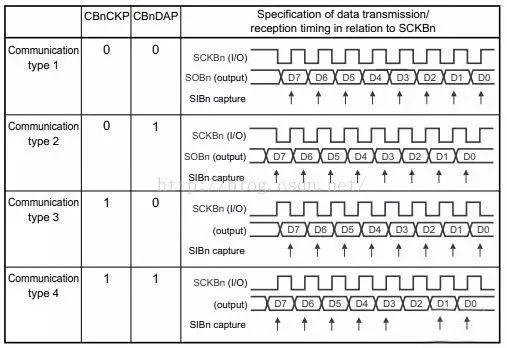
Mode 0 CPOL=0, CPHA=0
Mode 1 CPOL=0, CPHA=1
Mode 2 CPOL=1, CPHA=0
Mode 3 CPOL=1, CPHA=1
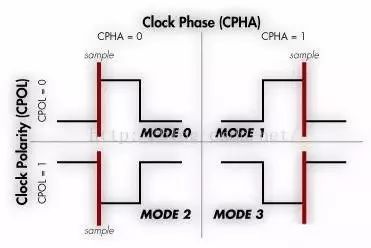
c,CPOL极性
先说英文,其精简解释为:Clock Polarity = IDLE state of SCK。
再用中文详解:
SPI的CPOL,表示当SCLK空闲idle的时候,其电平的值是低电平0还是高电平1:
CPOL=0,时钟空闲idle时候的电平是低电平,所以当SCLK有效的时候,就是高电平,就是所谓的active-high;
CPOL=1,时钟空闲idle时候的电平是高电平,所以当SCLK有效的时候,就是低电平,就是所谓的active-low;
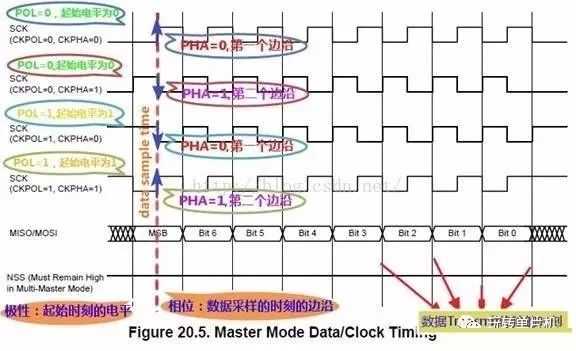
d,CPHA相位
对于:
CPHA=0,表示第一个边沿:
对于CPOL=0,idle时候的是低电平,第一个边沿就是从低变到高,所以是上升沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从高变到低,所以是下降沿;
CPHA=1,表示第二个边沿:
对于CPOL=0,idle时候的是低电平,第二个边沿就是从高变到低,所以是下降沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从低变到高,所以是上升沿;
还是上图大家更容易看懂
e,软件中如何设置SPI的极性和相位
而设置SPI的模式,是从设备的模式,决定了主设备的模式。
所以要先去搞懂从设备的SPI是何种模式,然后再将主设备的SPI的模式,设置和从设备相同的模式,即可正常通讯。
对于从设备的SPI是什么模式,有两种:
固定的,有SPI从设备硬件决定的
关于SPI从设备,在空闲的时候,是高电平还是低电平,即决定了CPOL是0还是1;
然后再找到关于设备是在上升沿还是下降沿去采样数据,这样就是,在定了CPOL的值的前提下,对应着可以推算出CPHA是0还是1了。
可配置的,由软件自己设定
然后知道了从设备的模式后,再去将SPI主设备的模式,设置为和从设备模式一样,即可。
对于如何配置SPI的CPOL和CPHA的话,不多细说,多数都是直接去写对应的SPI控制器中对应寄存器中的CPOL和CPHA那两位,写0或写1即可。
Bus-Width 的作用是指定地址总线到 Master 设备之间数据传输的单位.
例如, 我们想要往 Master 设备里面的 SSPBUF 写入 16 Byte 大小的数据: 首先, 给 Master 设备的配置寄存器设置 Bus-Width 为 Byte; 然后往 Master 设备的 Tx-Data 移位寄存器在地址总线的入口写入数据, 每次写入 1 Byte 大小的数据(使用 writeb 函数); 写完 1 Byte 数据之后, Master 设备里面的 Tx-Data 移位寄存器会自动把从地址总线传来的1 Byte 数据移入 SSPBUF 里; 上述动作一共需要重复执行 16 次.
Channel-Width 的作用是指定 Master 设备与 Slave 设备之间数据传输的单位. 与 Bus-Width 相似, Master 设备内部的移位寄存器会依据 Channel-Width 自动地把数据从 Master-SSPBUF 里通过 Master-SDO 管脚搬运到 Slave 设备里的 Slave-SDI 引脚, Slave-SSPSR 再把每次接收的数据移入 Slave-SSPBUF里.通常情况下, Bus-Width 总是会大于或等于 Channel-Width, 这样能保证不会出现因 Master 与 Slave 之间数据交换的频率比地址总线与 Master 之间的数据交换频率要快, 导致 SSPBUF 里面存放的数据为无效数据这样的情况.
(4) SSPBUF
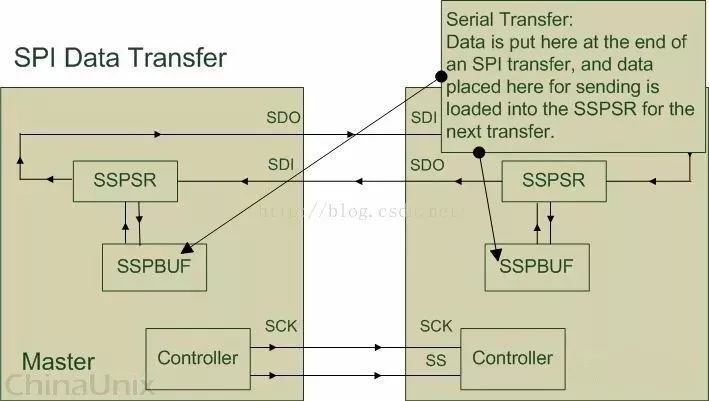
例如, 在发送数据之前, 我们应该先往 Master 的 Tx-Data 寄存器写入将要发送出去的数据, 这些数据会被 Master-SSPSR 移位寄存器根据 Bus-Width 自动移入 Master-SSPBUF 里, 然后这些数据又会被 Master-SSPSR 根据 Channel-Width 从 Master-SSPBUF 中移出, 通过 Master-SDO 管脚传给 Slave-SDI 管脚, Slave-SSPSR 则把从 Slave-SDI 接收到的数据移入 Slave-SSPBUF 里. 与此同时, Slave-SSPBUF 里面的数据根据每次接收数据的大小(Channel-Width), 通过 Slave-SDO 发往 Master-SDI, Master-SSPSR 再把从 Master-SDI 接收的数据移入 Master-SSPBUF.在单次数据传输完成之后, 用户程序可以通过从 Master 设备的 Rx-Data 寄存器读取 Master 设备数据交换得到的数据.
(5) Controller
Master 设备的片选操作必须由程序所实现. 例如: 由程序把 SS/CS 管脚的时钟信号拉低电平, 完成 SPI 设备数据通信的前期工作; 当程序想让 SPI 设备结束数据通信时, 再把 SS/CS 管脚上的时钟信号拉高电平.
SPI的优点和缺点
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
关注我的微信公众号,回复“加群”按规则加入技术交流群。
点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
评论