
项目实践 | 基于YOLO-V5实现行人社交距离风险提示
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
从代码的角度理解YOLO V5的工作。YOLO V5的网络结构图如下:
1、与YOLO V4的区别
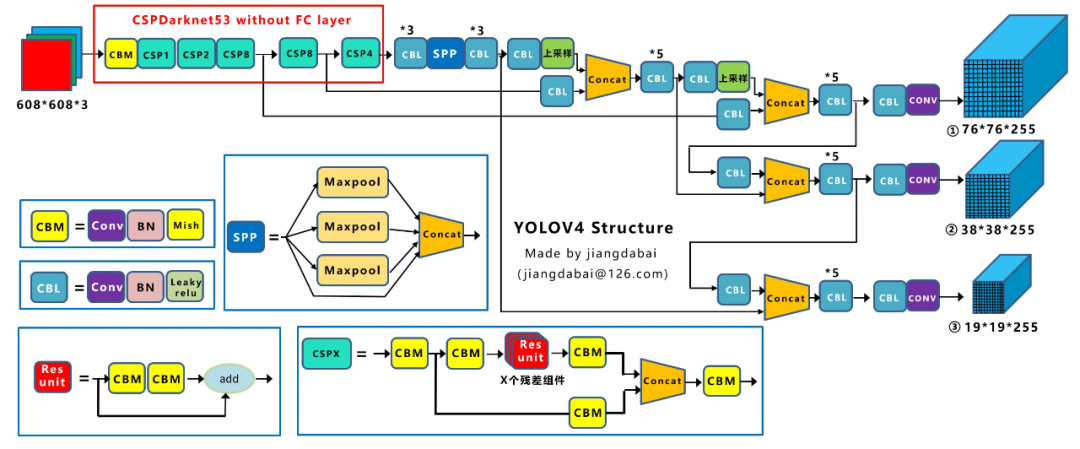
Yolov4在Yolov3的基础上进行了很多的创新。比如输入端采用mosaic数据增强,Backbone上采用了CSPDarknet53、Mish激活函数、Dropblock等方式,Neck中采用了SPP、FPN+PAN的结构,输出端则采用CIOU_Loss、DIOU_nms操作。因此Yolov4对Yolov3的各个部分都进行了很多的整合创新。这里给出YOLO V4的网络结构图:
Yolov5的结构其实和Yolov4的结构还是有一定的相似之处的,但也有一些不同,这里还是按照从整体到细节的方式,对每个板块进行讲解。这里给出YOLO V4的网络结构图:
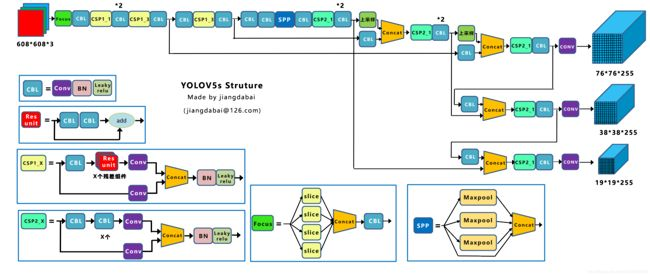
通过Yolov5的网络结构图可以看到,依旧是把模型分为4个部分,分别是:输入端、Backbone、Neck、Prediction。
1.1、输入端的区别
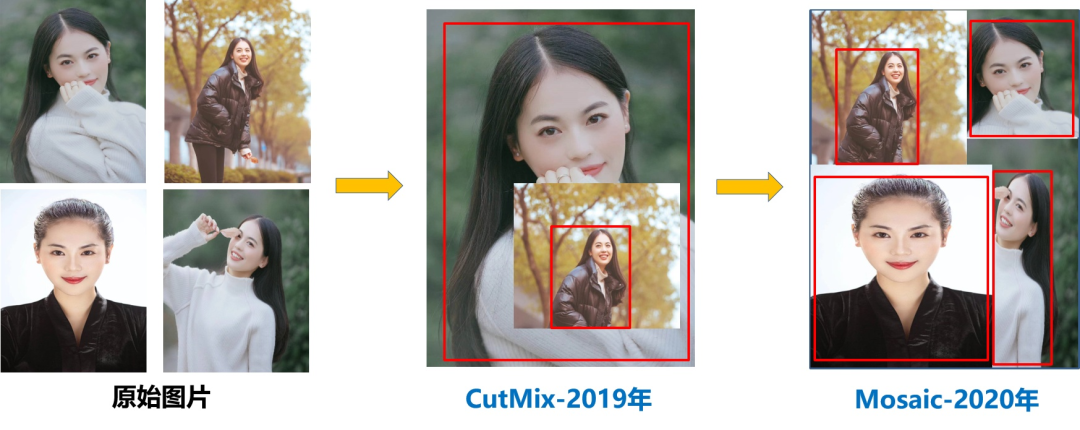
1 Mosaic数据增强
Mosaic是参考CutMix数据增强的方式,但CutMix只使用了两张图片进行拼接,而Mosaic数据增强则采用了4张图片,随机缩放、随机裁剪、随机排布的方式进行拼接。
主要有几个优点:
1、丰富数据集:随机使用4张图片,随机缩放,再随机分布进行拼接,大大丰富了检测数据集,特别是随机缩放增加了很多小目标,让网络的鲁棒性更好。
2、减少GPU:可能会有人说,随机缩放,普通的数据增强也可以做,但作者考虑到很多人可能只有一个GPU,因此Mosaic增强训练时,可以直接计算4张图片的数据,使得Mini-batch大小并不需要很大,一个GPU就可以达到比较好的效果。
2 自适应锚框计算
在Yolov3、Yolov4中,训练不同的数据集时,计算初始锚框的值是通过单独的程序运行的。但Yolov5中将此功能嵌入到代码中,每次训练时,自适应的计算不同训练集中的最佳锚框值。
比如Yolov5在Coco数据集上初始设定的锚框:
3 自适应图片缩放
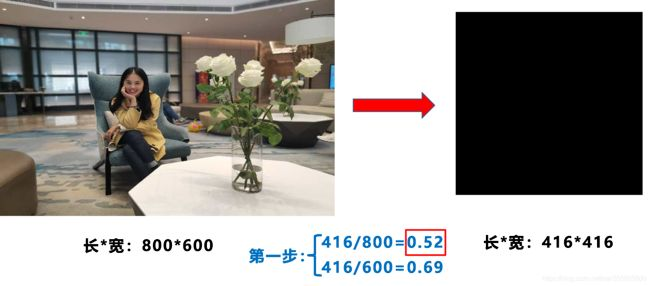
在常用的目标检测算法中,不同的图片长宽都不相同,因此常用的方式是将原始图片统一缩放到一个标准尺寸,再送入检测网络中。比如Yolo算法中常用416×416,608×608等尺寸,比如对下面800×600的图像进行变换。

但Yolov5代码中对此进行了改进,也是Yolov5推理速度能够很快的一个不错的trick。作者认为,在项目实际使用时,很多图片的长宽比不同。因此缩放填充后,两端的黑边大小都不同,而如果填充的比较多,则存在信息冗余,影响推理速度。
具体操作的步骤:
1 计算缩放比例
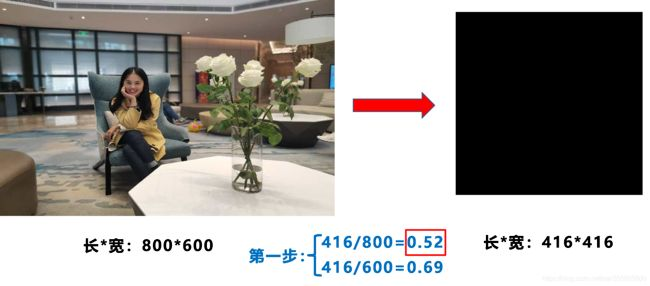 原始缩放尺寸是416×416,都除以原始图像的尺寸后,可以得到0.52,和0.69两个缩放系数,选择小的缩放系数0.52。
原始缩放尺寸是416×416,都除以原始图像的尺寸后,可以得到0.52,和0.69两个缩放系数,选择小的缩放系数0.52。
2 计算缩放后的尺寸
原始图片的长宽都乘以最小的缩放系数0.52,宽变成了416,而高变成了312。
3 计算黑边填充数值
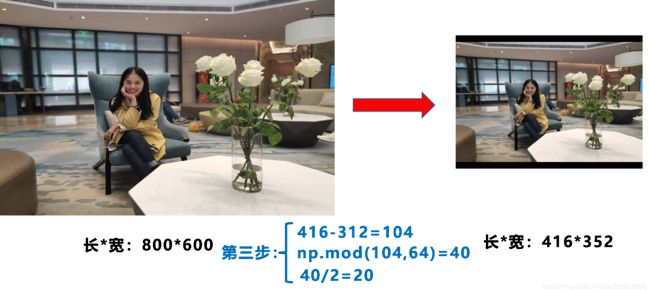
将416-312=104,得到原本需要填充的高度。再采用numpy中np.mod取余数的方式,得到40个像素,再除以2,即得到图片高度两端需要填充的数值。
1.2、Backbone的区别
1 Focus结构
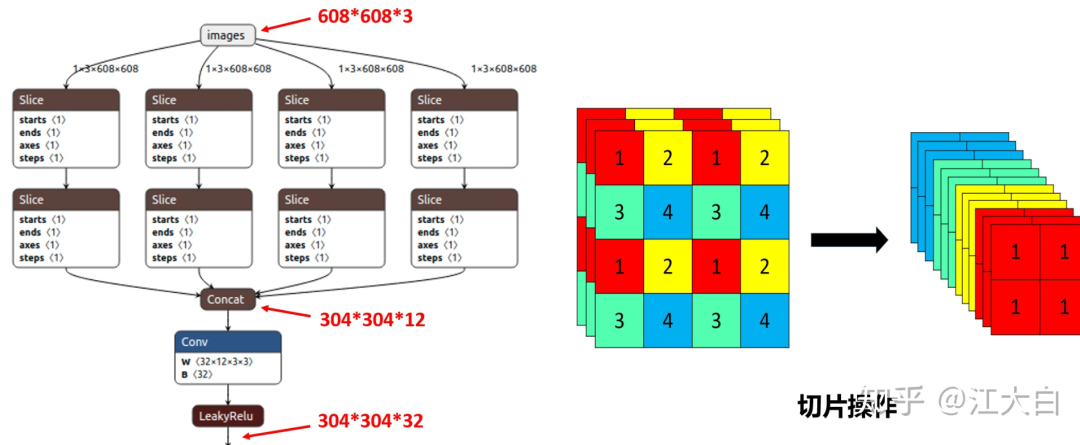
Focus结构,在Yolov3&Yolov4中并没有这个结构,其中比较关键是切片操作。比如右图的切片示意图,4×4×3的图像切片后变成3×3×12的特征图。以Yolov5s的结构为例,原始608×608×3的图像输入Focus结构,采用切片操作,先变成304×304×12的特征图,再经过一次32个卷积核的卷积操作,最终变成304×304×32的特征图。
需要注意的是:Yolov5s的Focus结构最后使用了32个卷积核,而其他三种结构,使用的数量有所增加,先注意下,后面会讲解到四种结构的不同点。
class Focus(nn.Module):
# Focus wh information into c-space
def __init__(self, c1, c2, k=1):
super(Focus, self).__init__()
self.conv = Conv(c1 * 4, c2, k, 1)
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
2 CSP结构
Yolov5与Yolov4不同点在于,Yolov4中只有主干网络使用了CSP结构,而Yolov5中设计了两种CSP结构,以Yolov5s网络为例,以CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。

class Conv(nn.Module):
# Standard convolution
def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
super(Conv, self).__init__()
self.conv = nn.Conv2d(c1, c2, k, s, k // 2, groups=g, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = nn.LeakyReLU(0.1, inplace=True) if act else nn.Identity()
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def fuseforward(self, x):
return self.act(self.conv(x))
class Bottleneck(nn.Module):
# Standard bottleneck
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super(Bottleneck, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c2, 3, 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class BottleneckCSP(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super(BottleneckCSP, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
self.cv4 = Conv(c2, c2, 1, 1)
self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
self.act = nn.LeakyReLU(0.1, inplace=True)
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
def forward(self, x):
y1 = self.cv3(self.m(self.cv1(x)))
y2 = self.cv2(x)
return self.cv4(self.act(self.bn(torch.cat((y1, y2), dim=1))))
1.3、Neck的区别
Yolov5现在的Neck和Yolov4中一样,都采用FPN+PAN的结构,但在Yolov5刚出来时,只使用了FPN结构,后面才增加了PAN结构,此外网络中其他部分也进行了调整。
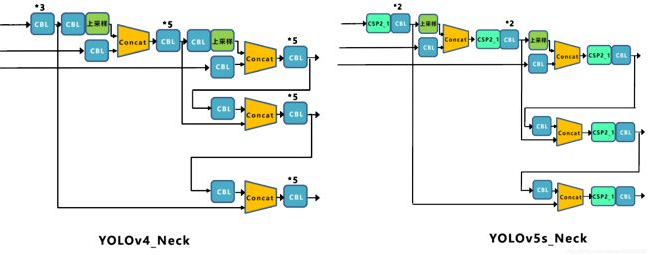
Yolov5和Yolov4的不同点在于,Yolov4的Neck中,采用的都是普通的卷积操作。而Yolov5的Neck结构中,采用借鉴CSPNet设计的CSP2结构,加强网络特征融合的能力。
1.4、输出端的区别
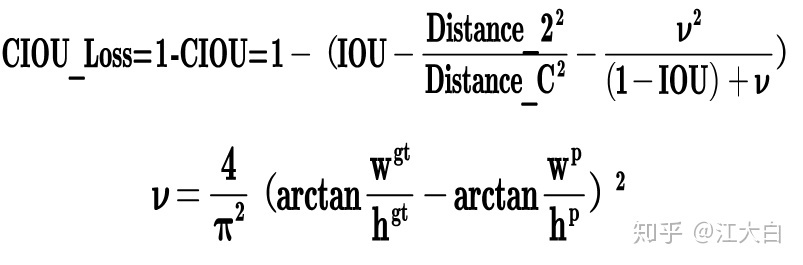
1 Bounding box损失函数
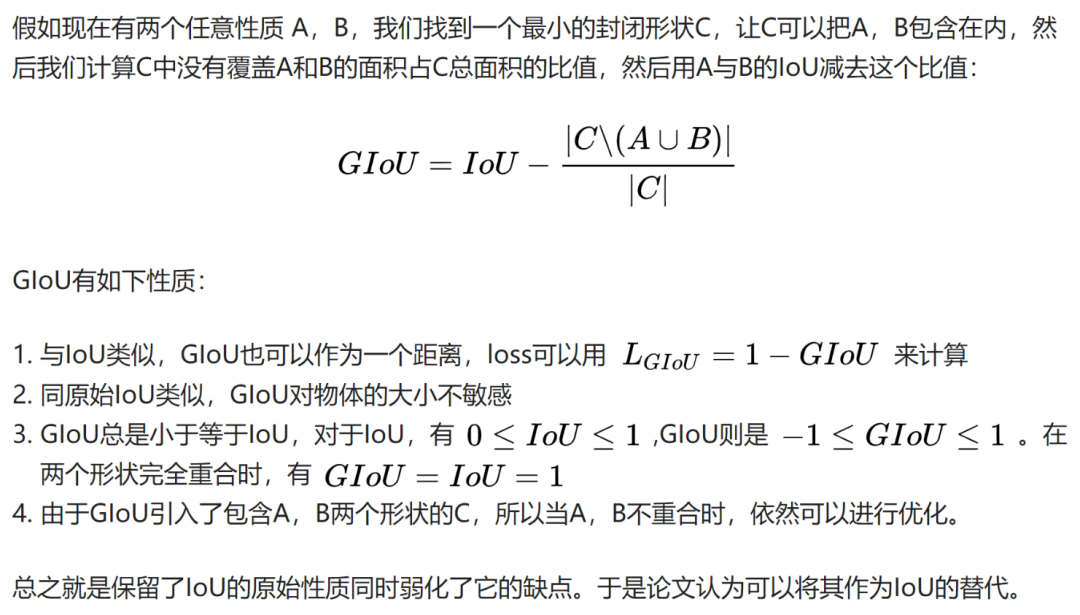
而Yolov4中采用CIOU_Loss作为目标Bounding box的损失。而Yolov5中采用其中的GIOU_Loss做Bounding box的损失函数。
def compute_loss(p, targets, model): # predictions, targets, model
ft = torch.cuda.FloatTensor if p[0].is_cuda else torch.Tensor
lcls, lbox, lobj = ft([0]), ft([0]), ft([0])
tcls, tbox, indices, anchors = build_targets(p, targets, model) # targets
h = model.hyp # hyperparameters
red = 'mean' # Loss reduction (sum or mean)
# Define criteria
BCEcls = nn.BCEWithLogitsLoss(pos_weight=ft([h['cls_pw']]), reduction=red)
BCEobj = nn.BCEWithLogitsLoss(pos_weight=ft([h['obj_pw']]), reduction=red)
# class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
cp, cn = smooth_BCE(eps=0.0)
# focal loss
g = h['fl_gamma'] # focal loss gamma
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
# per output
nt = 0 # targets
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros_like(pi[..., 0]) # target obj
nb = b.shape[0] # number of targets
if nb:
nt += nb # cumulative targets
ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
# GIoU
pxy = ps[:, :2].sigmoid() * 2. - 0.5
pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
giou = bbox_iou(pbox.t(), tbox[i], x1y1x2y2=False, GIoU=True) # giou(prediction, target)
lbox += (1.0 - giou).sum() if red == 'sum' else (1.0 - giou).mean() # giou loss
# Obj
tobj[b, a, gj, gi] = (1.0 - model.gr) + model.gr * giou.detach().clamp(0).type(tobj.dtype) # giou ratio
# Class
if model.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(ps[:, 5:], cn) # targets
t[range(nb), tcls[i]] = cp
lcls += BCEcls(ps[:, 5:], t) # BCE
# Append targets to text file
# with open('targets.txt', 'a') as file:
# [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
lobj += BCEobj(pi[..., 4], tobj) # obj loss
lbox *= h['giou']
lobj *= h['obj']
lcls *= h['cls']
bs = tobj.shape[0] # batch size
if red == 'sum':
g = 3.0 # loss gain
lobj *= g / bs
if nt:
lcls *= g / nt / model.nc
lbox *= g / nt
loss = lbox + lobj + lcls
return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
2 NMS非极大值抑制
Yolov4在DIOU_Loss的基础上采用DIOU_NMS的方式,而Yolov5中采用加权NMS的方式。可以看出,采用DIOU_NMS,下方中间箭头的黄色部分,原本被遮挡的摩托车也可以检出。
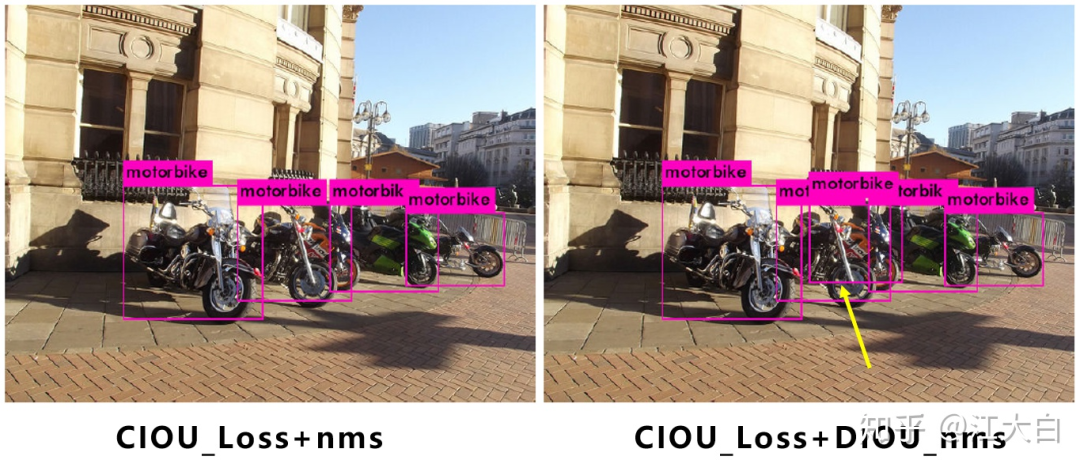
在同样的参数情况下,将NMS中IOU修改成DIOU_NMS。对于一些遮挡重叠的目标,确实会有一些改进。
2、YOLOv5社交距离项目
yolov5检测要检测的视频流中的所有人,然后再计算所有检测到的人之间的相互“距离”,和现实生活中用“m”这样的单位衡量距离不一样的是,在计算机中,简单的方法是用检测到的两个人的质心,也就是检测到的目标框的中心之间相隔的像素值作为计算机中的“距离”来衡量视频中的人之间的距离是否超过安全距离。
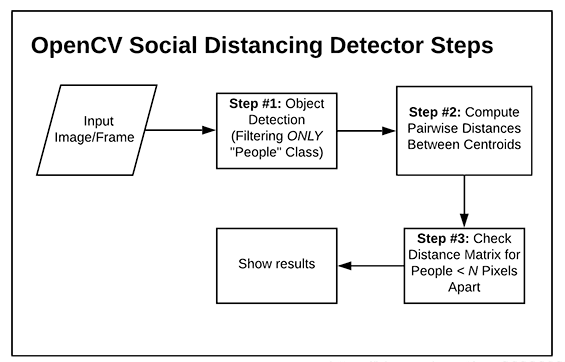
构建步骤:
使用目标检测算法检测视频流中的所有人,得到位置信息和质心位置;
计算所有检测到的人质心之间的相互距离;
设置安全距离,计算每个人之间的距离对,检测两个人之间的距离是否小于N个像素,小于则处于安全距离,反之则不处于。
项目架构:
detect.py代码注释如下:
import argparse
from utils.datasets import *
from utils.utils import *
def detect(save_img=False):
out, source, weights, view_img, save_txt, imgsz = \
opt.output, opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size
webcam = source == '0' or source.startswith('rtsp') or source.startswith('http') or source.endswith('.txt')
# Initialize
device = torch_utils.select_device(opt.device)
if os.path.exists(out):
shutil.rmtree(out) # delete output folder
os.makedirs(out) # make new output folder
half = device.type != 'cpu' # half precision only supported on CUDA
# 下载模型
google_utils.attempt_download(weights)
# 加载权重
model = torch.load(weights, map_location=device)['model'].float()
# torch.save(torch.load(weights, map_location=device), weights) # update model if SourceChangeWarning
# model.fuse()
# 设置模型为推理模式
model.to(device).eval()
if half:
model.half() # to FP16
# Second-stage classifier
classify = False
if classify:
modelc = torch_utils.load_classifier(name='resnet101', n=2) # initialize
modelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']) # load weights
modelc.to(device).eval()
# 设置 Dataloader
vid_path, vid_writer = None, None
if webcam:
view_img = True
torch.backends.cudnn.benchmark = True # set True to speed up constant image size inference
dataset = LoadStreams(source, img_size=imgsz)
else:
save_img = True
dataset = LoadImages(source, img_size=imgsz)
# 获取检测类别的标签名称
names = model.names if hasattr(model, 'names') else model.modules.names
# 定义颜色
colors = [[random.randint(0, 255) for _ in range(3)] for _ in range(len(names))]
# 开始推理
t0 = time.time()
# 初始化一张全为0的图片
img = torch.zeros((1, 3, imgsz, imgsz), device=device)
_ = model(img.half() if half else img) if device.type != 'cpu' else None
for path, img, im0s, vid_cap in dataset:
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
# 预测结果
t1 = torch_utils.time_synchronized()
pred = model(img, augment=opt.augment)[0]
# 使用NMS
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, fast=True, classes=opt.classes, agnostic=opt.agnostic_nms)
t2 = torch_utils.time_synchronized()
# 进行分类
if classify:
pred = apply_classifier(pred, modelc, img, im0s)
people_coords = []
# 处理预测得到的检测目标
for i, det in enumerate(pred):
if webcam:
p, s, im0 = path[i], '%g: ' % i, im0s[i].copy()
else:
p, s, im0 = path, '', im0s
save_path = str(Path(out) / Path(p).name)
s += '%gx%g ' % img.shape[2:] # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
if det is not None and len(det):
# 把boxes resize到im0的size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# 打印结果
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += '%g %ss, ' % (n, names[int(c)]) # add to string
# 书写结果
for *xyxy, conf, cls in det:
if save_txt:
# xyxy2xywh ==> 把预测得到的坐标结果[x1, y1, x2, y2]转换为[x, y, w, h]其中 xy1=top-left, xy2=bottom-right
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
with open(save_path[:save_path.rfind('.')] + '.txt', 'a') as file:
file.write(('%g ' * 5 + '\n') % (cls, *xywh)) # label format
if save_img or view_img: # Add bbox to image
label = '%s %.2f' % (names[int(cls)], conf)
if label is not None:
if (label.split())[0] == 'person':
# print(xyxy)
people_coords.append(xyxy)
# plot_one_box(xyxy, im0, line_thickness=3)
plot_dots_on_people(xyxy, im0)
# 通过people_coords绘制people之间的连接线
# 这里主要分为"Low Risk "和"High Risk"
distancing(people_coords, im0, dist_thres_lim=(200, 250))
# Print time (inference + NMS)
print('%sDone. (%.3fs)' % (s, t2 - t1))
# Stream results
if view_img:
cv2.imshow(p, im0)
if cv2.waitKey(1) == ord('q'): # q to quit
raise StopIteration
# Save results (image with detections)
if save_img:
if dataset.mode == 'images':
cv2.imwrite(save_path, im0)
else:
if vid_path != save_path: # new video
vid_path = save_path
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release() # release previous video writer
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*opt.fourcc), fps, (w, h))
vid_writer.write(im0)
if save_txt or save_img:
print('Results saved to %s' % os.getcwd() + os.sep + out)
if platform == 'darwin': # MacOS
os.system('open ' + save_path)
print('Done. (%.3fs)' % (time.time() - t0))
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='./weights/yolov5s.pt', help='model.pt path')
parser.add_argument('--source', type=str, default='./inference/videos/', help='source') # file/folder, 0 for webcam
parser.add_argument('--output', type=str, default='./inference/output', help='output folder') # output folder
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.4, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.5, help='IOU threshold for NMS')
parser.add_argument('--fourcc', type=str, default='mp4v', help='output video codec (verify ffmpeg support)')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
opt = parser.parse_args()
opt.img_size = check_img_size(opt.img_size)
print(opt)
with torch.no_grad():
detect()
参考
[1].https://zhuanlan.zhihu.com/p/172121380
[2].https://blog.csdn.net/weixin_45192980/article/details/108354169
[3].https://github.com/ultralytics/yoloV5
[4].https://github.com/Akbonline/Social-Distancing-using-YOLOv5
本文仅做学术分享,如有侵权,请联系删文。
—THE END—