
使用OpenCV实现图像增强
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
本期将介绍如何通过图像处理从低分辨率/模糊/低对比度的图像中提取有用信息。
下面让我们一起来探究这个过程:
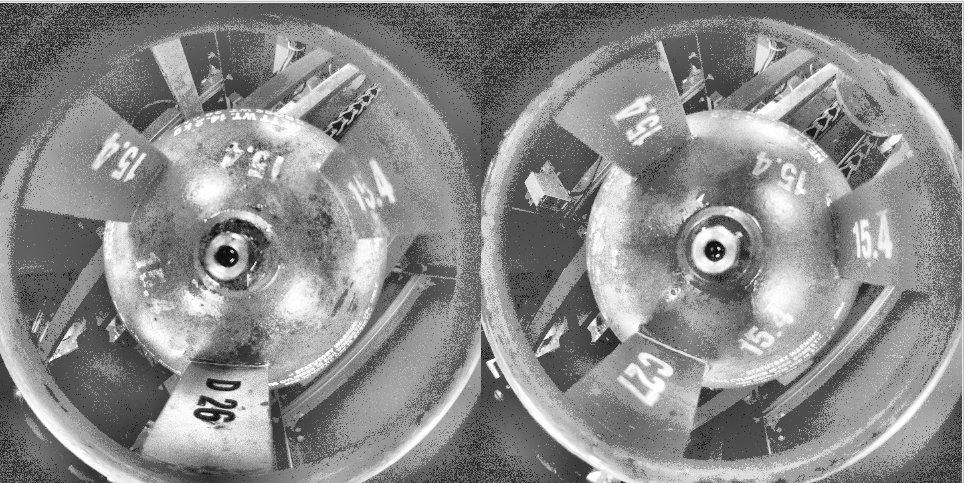
首先我们获取了一个LPG气瓶图像,该图像取自在传送带上运行的仓库。我们的目标是找出LPG气瓶的批号,以便更新已检测的LPG气瓶数量。
步骤1:导入必要的库
import cv2import numpy as npimport matplotlib.pyplot as plt
步骤2:加载图像并显示示例图像。
img= cv2.imread('cylinder1.png')img1=cv2.imread('cylinder.png')images=np.concatenate(img(img,img1),axis=1)cv2.imshow("Images",images)cv2.waitKey(0)cv2.destroyAllWindows()
 LPG气瓶图片(a)批次-D26(b)批次C27
LPG气瓶图片(a)批次-D26(b)批次C27
该图像的对比度非常差。我们几乎看不到批号。这是在灯光条件不足的仓库中的常见问题。接下来我们将讨论对比度受限的自适应直方图均衡化,并尝试对数据集使用不同的算法进行实验。
步骤3:将图像转换为灰度图像
gray_img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)gray_img1=cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
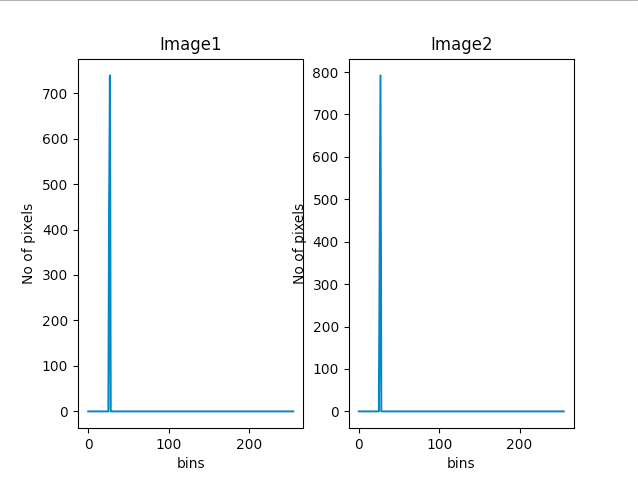
步骤4:找到灰度图像的直方图后,寻找强度的分布。
hist=cv2.calcHist(gray_img,[0],None,[256],[0,256])hist1=cv2.calcHist(gray_img1,[0],None,[256],[0,256])plt.subplot(121)plt.title("Image1")plt.xlabel('bins')plt.ylabel("No of pixels")plt.plot(hist)plt.subplot(122)plt.title("Image2")plt.xlabel('bins')plt.ylabel("No of pixels")plt.plot(hist1)plt.show()
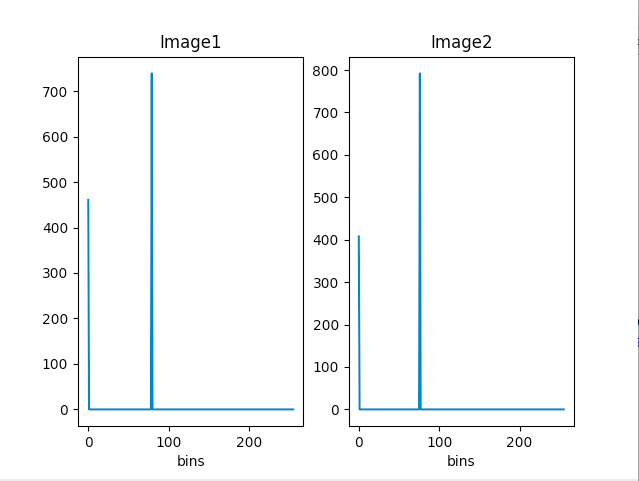
步骤5:现在,使用cv2.equalizeHist()函数来均衡给定灰度图像的对比度。cv2.equalizeHist()函数可标准化亮度并增加对比度。
gray_img_eqhist=cv2.equalizeHist(gray_img)gray_img1_eqhist=cv2.equalizeHist(gray_img1)hist=cv2.calcHist(gray_img_eqhist,[0],None,[256],[0,256])hist1=cv2.calcHist(gray_img1_eqhist,[0],None,[256],[0,256])plt.subplot(121)plt.plot(hist)plt.subplot(122)plt.plot(hist1)plt.show()
步骤6:显示灰度直方图均衡图像
eqhist_images=np.concatenate((gray_img_eqhist,gray_img1_eqhist),axis=1)cv2.imshow("Images",eqhist_images)cv2.waitKey(0)cv2.destroyAllWindows()
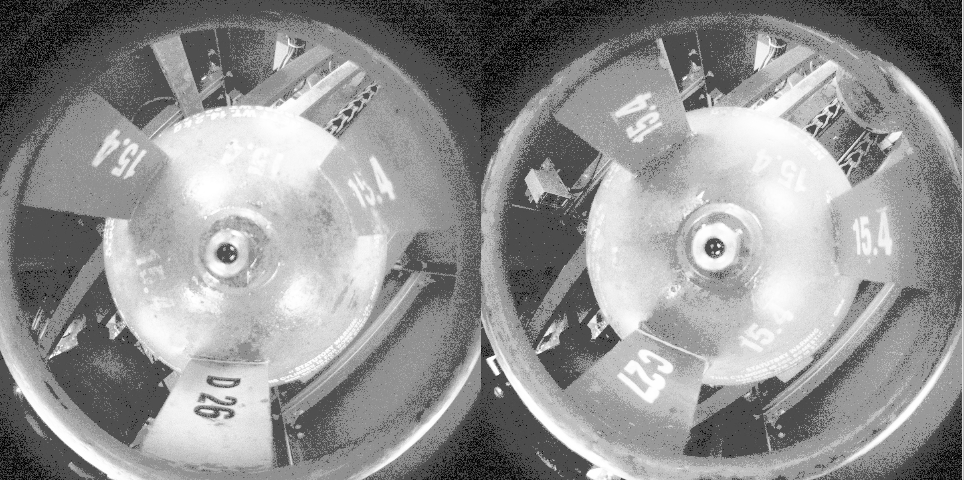
灰度直方图均衡
让我们进一步深入了解CLAHE
步骤7:
对比度有限的自适应直方图均衡
该算法可以用于改善图像的对比度。该算法通过创建图像的多个直方图来工作,并使用所有这些直方图重新分配图像的亮度。CLAHE可以应用于灰度图像和彩色图像。有2个参数需要调整。
1. 限幅设置了对比度限制的阈值。默认值为40
2. tileGridsize设置行和列中标题的数量。在应用CLAHE时,为了执行计算,图像被分为称为图块(8 * 8)的小块。
clahe=cv2.createCLAHE(clipLimit=40)gray_img_clahe=clahe.apply(gray_img_eqhist)gray_img1_clahe=clahe.apply(gray_img1_eqhist)images=np.concatenate((gray_img_clahe,gray_img1_clahe),axis=1)cv2.imshow("Images",images)cv2.waitKey(0)cv2.destroyAllWindows()
步骤8:
门槛技术
阈值处理是一种将图像划分为前景和背景的简单但有效的方法。如果像素强度小于某个预定义常数(阈值),则最简单的阈值化方法将源图像中的每个像素替换为黑色像素;如果像素强度大于阈值,则使用白色像素替换源像素。阈值的不同类型是:
cv2.THRESH_BINARY
cv2.THRESH_BINARY_INV
cv2.THRESH_TRUNC
cv2.THRESH_TOZERO
cv2.THRESH_TOZERO_INV
cv2.THRESH_OTSU
cv2.THRESH_TRIANGLE
尝试更改阈值和max_val以获得不同的结果。
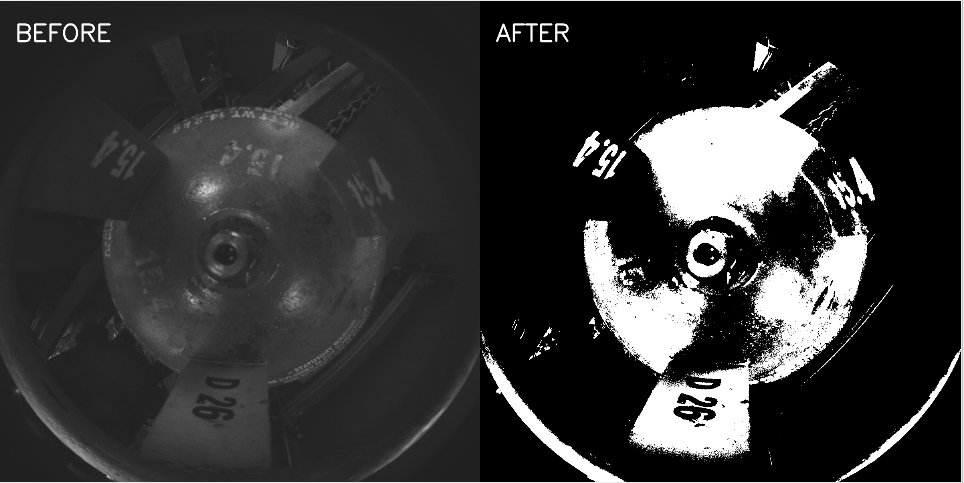
th=80max_val=255ret, o1 = cv2.threshold(gray_img_clahe, th, max_val, cv2.THRESH_BINARY)cv2.putText(o1,"Thresh_Binary",(40,100),cv2.FONT_HERSHEY_SIMPLEX,2,(255,255,255),3,cv2.LINE_AA)ret, o2 = cv2.threshold(gray_img_clahe, th, max_val, cv2.THRESH_BINARY_INV)cv2.putText(o2,"Thresh_Binary_inv",(40,100),cv2.FONT_HERSHEY_SIMPLEX,2,(255,255,255),3,cv2.LINE_AA)ret, o3 = cv2.threshold(gray_img_clahe, th, max_val, cv2.THRESH_TOZERO)cv2.putText(o3,"Thresh_Tozero",(40,100),cv2.FONT_HERSHEY_SIMPLEX,2,(255,255,255),3,cv2.LINE_AA)ret, o4 = cv2.threshold(gray_img_clahe, th, max_val, cv2.THRESH_TOZERO_INV)cv2.putText(o4,"Thresh_Tozero_inv",(40,100),cv2.FONT_HERSHEY_SIMPLEX,2,(255,255,255),3,cv2.LINE_AA)ret, o5 = cv2.threshold(gray_img_clahe, th, max_val, cv2.THRESH_TRUNC)cv2.putText(o5,"Thresh_trunc",(40,100),cv2.FONT_HERSHEY_SIMPLEX,2,(255,255,255),3,cv2.LINE_AA)ret ,o6= cv2.threshold(gray_img_clahe, th, max_val, cv2.THRESH_OTSU)cv2.putText(o6,"Thresh_OSTU",(40,100),cv2.FONT_HERSHEY_SIMPLEX,2,(255,255,255),3,cv2.LINE_AA)final=np.concatenate((o1,o2,o3),axis=1)final1=np.concatenate((o4,o5,o6),axis=1)cv2.imwrite("Image1.jpg",final)cv2.imwrite("Image2.jpg",final1)
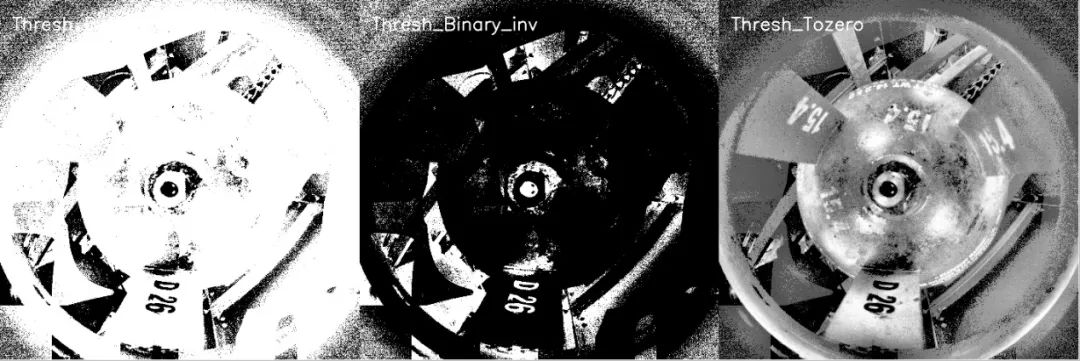
Thresh_Binary_inv,Thresh_Binary_inv,Thresh_Tozero

Thresh_Tozero_inv,Thresh_trunc,Thresh_OSTU
步骤9:自适应阈值
在上一节中,我们使用了全局阈值来应用cv2.threshold()。如我们所见,由于图像不同区域的照明条件不同,因此获得的结果不是很好。在这些情况下,您可以尝试自适应阈值化。在OpenCV中,自适应阈值处理由cv2.adapativeThreshold()函数执行
此功能将自适应阈值应用于src阵列(8位单通道图像)。maxValue参数设置dst图像中满足条件的像素的值。adaptiveMethod参数设置要使用的自适应阈值算法。
cv2.ADAPTIVE_THRESH_MEAN_C:将T(x,y)阈值计算为(x,y)的blockSize x blockSize邻域的平均值减去C参数。
cv2.ADAPTIVE_THRESH_GAUSSIAN_C:将T(x,y)阈值计算为(x,y)的blockSize x blockSize邻域的加权总和减去C参数。
blockSize参数设置用于计算像素阈值的邻域的大小,它可以取值3、5、7等。
C参数只是从均值或加权均值中减去的常数(取决于adaptiveMethod参数设置的自适应方法)。通常,此值为正,但可以为零或负。
gray_image = cv2.imread('cylinder1.png',0)gray_image1 = cv2.imread('cylinder.png',0)thresh1 = cv2.adaptiveThreshold(gray_image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)thresh2 = cv2.adaptiveThreshold(gray_image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 31, 3)thresh3 = cv2.adaptiveThreshold(gray_image, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 13, 5)thresh4 = cv2.adaptiveThreshold(gray_image, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 31, 4)thresh11 = cv2.adaptiveThreshold(gray_image1, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)thresh21 = cv2.adaptiveThreshold(gray_image1, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 31, 5)thresh31 = cv2.adaptiveThreshold(gray_image1, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 21,5 )thresh41 = cv2.adaptiveThreshold(gray_image1, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 31, 5)final=np.concatenate((thresh1,thresh2,thresh3,thresh4),axis=1)final1=np.concatenate((thresh11,thresh21,thresh31,thresh41),axis=1)cv2.imwrite('rect.jpg',final)cv2.imwrite('rect1.jpg',final1)
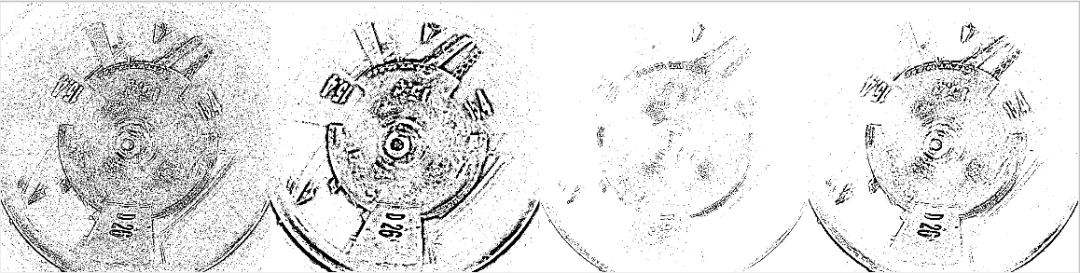
自适应阈值
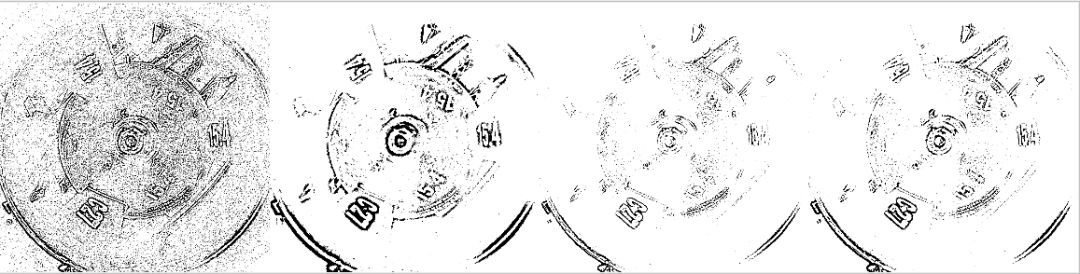
自适应阈值
步骤10:OTSU二值化
gray_image = cv2.imread('cylinder1.png',0)gray_image1 = cv2.imread('cylinder.png',0)ret,thresh1 = cv2.threshold(gray_image,0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU)ret,thresh2 = cv2.threshold(gray_image1,0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU)cv2.imwrite('rect.jpeg',np.concatenate((thresh1,thresh2),axis=1))

OTSU二值化
现在,我们已经从低对比度的图像中清楚地识别出批号。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~