
【论文解读】解读TRPO论文,深度强化学习结合传统优化方法
导读:本论文由Berkeley 的几位大神于2015年发表于 JMLR(Journal of Machine Learning Research)。深度强化学习算法例如DQN或者PG(Policy Gradient)都无法避免训练不稳定的问题:在训练过程中效果容易退化并且很难恢复。针对这个通病,TRPO采用了传统优化算法中的trust region方法,以保证每一步迭代能够获得效果提升,直至收敛到局部最优点。
本篇论文涉及到的知识点比较多,不仅建立在强化学习领域经典论文的结论:Kakade & Langford 于2002 年发表的 Approximately Optimal Approximate Reinforcement Learning 关于优化目标的近似目标和重要性采样,也涉及到传统优化方法 trust region 的建模和其具体的矩阵近似数值算法。读懂本论文,对于深度强化学习及其优化方法可以有比较深入的理解。本论文附录的证明部分由于更为深奥和冗长,在本文中不做具体讲解,但是也建议大家能够仔细研读。
阅读本论文需要注意的是,这里解读的版本是arxiv的版本,这个版本带有附录,不同于 JMLR的版本的是,arxiv版本中用reward函数而后者用cost函数,优化方向相反。
arxiv 下载链接为 https://arxiv.org/pdf/1502.05477.pdf
0. 论文框架
本论文解决的目标是希望每次迭代参数能保证提升效果,具体想法是利用优化领域的 trust region方法(中文可以翻译成置信域方法或信赖域方法),通过参数在trust region范围中去找到一定能提升的下一次迭代。
本论文框架如下
首先,引入Kakade & Langford 论文 Approximately Optimal Approximate Reinforcement Learning 中关于近似优化目标的结论。(论文第二部分)
基于 Kakade 论文中使用mixture policy保证每一步效果提升的方法,扩展到一般随机策略,引入策略分布的total variation divergence作为约束。(论文第三部分)
将total variation divergence约束替换成平均 KL divergence 约束,便于使用蒙特卡洛方法通过采样来生成每一步的具体优化问题。(论文第四,五部分)
给出解决优化问题的具体算法,将优化目标用first order来近似,约束项用second order 来近似,由于second order涉及到构造Hessian matrix,计算量巨大,论文给出了 conjugate gradient + Fisher information matrix的近似快速实现方案。(论文第六部分)
从理论角度指出,Kakade 在2002年提出的方法natrual policy gradient 和经典的policy gradient 都是TRPO的特别形式。(论文第七部分)
评价TRPO在两种强化学习模式下的最终效果,一种是MuJoCo模拟器中能得到真实状态的模式,一种是Atari游戏环境,即观察到的屏幕像素可以信息完全地表达潜在真实状态的模式。(论文第八部分)
本文下面的小结序号和论文小结序号相同,便于对照查阅。
1. 介绍
TRPO 第一次证明了最小化某种 surrogate 目标函数且采用non-trivial的步长,一定可以保证策略提升。进一步将此 surrogate 目标函数转换成trust region约束下的优化问题。TRPO是一种on-policy 的算法,因为每一步迭代,需要在新的策略下通过采样数据来构建具体优化问题。
2. 已有理论基础
第二部分主要回顾了 Kakade & Langford 于2002 年的论文 Approximately Optimal Approximate Reinforcement Learning 中的一系列结论。
先来定义几个重要概念的数学定义
是策略 的目标,即discounted reward 和的期望。

然后是策略的Q值和V值
最后是策略的advantage函数

接着,开始引入 Kakade & Langford 论文结论,即下式(公式1)。

公式1表明,下一次迭代策略的目标可以分解成现有策略的目标 和现有advantage 函数在新策略trajectory分布下的期望。
公式1可以很容易从trajectory分布转换成新策略在状态的访问频率,即公式2

状态的访问频率或稳定状态分布定义成

注意到公式2中状态的期望依然依赖于新策略 的稳定状态分布,不方便实现。原因如下,期望形式有利于采样来解决问题,但是由于采样数据源于 on-policy 而非 ,因此无法直接采样未知的策略 。
幸好,Kakade 论文中证明了,可以用 的代替 并且证明了这种代替下的近似目标函数 是原来函数的一阶近似
即满足
具体定义表达式为

是一阶近似意味着在小范围区域中一定是可以得到提升的,但是范围是多大,是否能保证 的提升?Kakade的论文中不仅给出了通过mix新老策略的提升方式,还给出了这个方式对原目标 较 的提升下届。
策略更新规则如下
公式6为具体提升下届为
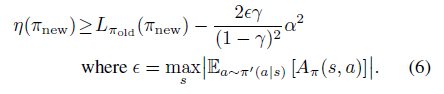
3. 扩展到随机策略
论文的这一部分将Kakade的mix policy update 扩展到一般的随机策略,同时依然保证每次迭代能得到目标提升。
首先,每次策略迭代必须不能和现有策略变化太大,因此,引入分布间常见的TV divergence,即 total variation divergence。

有了两个分布距离的定义,就可以定义两个策略的距离。离散状态下,一个策略是状态到动作分布的 map 或者 dict,因此,可以定义两个策略的距离为所有状态中最大的动作分布的 ,即

至此,可以引出定理一:在一般随机策略下,Kakade 的surrogate函数较原目标的提升下届依然成立,即公式8在新的定义下可以从公示6推导而来。

进一步将 TV divergence 转换成 KL divergence,转换成KL divergence 的目的是为了后续使用传统且成熟的 trust region 蒙特卡洛方法和 conjugate gradient 的优化近似解法。

由于上面两种距离的大小关系,可以推导出用KL divergence表示的 较 的提升下届

根据公式9,就可以形成初步的概念上的算法一,通过每一步形成无约束优化问题,同时保证每次迭代的 对应的 是递增的。
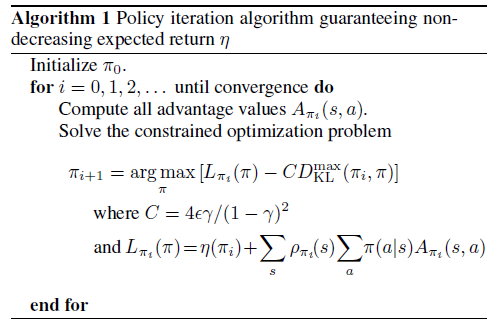
4. Trust Region Policy Optimization
看到这里已经不容易了,尽管算法一给出了一个解决方案,但是本论文的主角TRPO 还未登场。TRPO算法的作用依然是近似!
算法一对于下面的目标函数做优化,即每次找到下一个 最大化下式, 每一步一定能得到提升。
问题是在实践中,惩罚系数 会导致步长非常小,一种稳定的使用较大步长的方法是将惩罚项变成约束项,即:
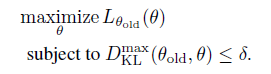
将 放入约束项中符合trust region 这种传统优化解法。
关于 约束,再补充两点
的定义是两个策略中所有状态中最大的动作分布的 ,因此它约束了所有状态下新老策略动作分布的KL散度,也就意味着有和状态数目相同数量的约束项,海量的约束项导致算法很难应用到实际中。
约束项的 trust region 不是参数 的空间,而是其KL散度的空间。
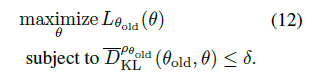
基于第一点,再次使用近似法,在约束项中用KL期望 来代替各个状态下的KL散度,权重为on-policy 策略的分布

最终,得到TRPO在实际中的优化目标(12式):
5. 用采样方法来Trust Region约束优化
论文第五部分,将TRPO优化目标12式改写成期望形式,引入两种蒙特卡洛方法 single path 和 vine 来采样。
具体来说, 由两项组成
第一项是常量,只需优化第二项,即优化问题等价为13式

随后,为了可以适用非 on-policy 的动作分布来任意采样,引入采样的动作分布 ,将13式中的 部分通过重要性采样改成以下形式:

再将13式中的 改成期望形式 ,并将 改成 值,得14式。
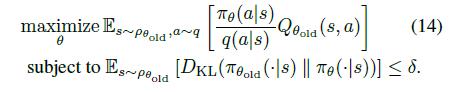
至此,我们得到trust region优化的期望形式:优化目标中期望的状态空间是基于 on-policy ,动作空间是基于任意采样分布 ,优化约束中的期望是基于 on-policy 。
5.1 Single path采样
根据14式,single path 是最基本的的蒙特卡洛采样方法,和REINFORCE算法一样, 通过on-policy 生成采样的 trajectory数据:,然后代入14式。注意,此时 ,即用现有策略的动作分布直接代替采样分布。
5.2 Vine 采样
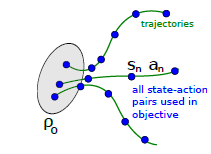
虽然single path方法简单明了,但是有着online monte carlo方法固有的缺陷,即variance较大。Vine方法通过在一个状态多次采样来改善此缺陷。Vine的翻译是藤,寓意从一个状态多次出发来采样,如下图, 状态下采样多个rollouts,很像植物的藤长出多分叉。当然,vine方法要求环境能restart 到某一状态,比如游戏环境通过save load返回先前的状态。

具体来说,vine 方法首先通过生成多个on-policy 的trajectories来确定一个状态集合 。对于状态集合的每一个状态 采样K个动作,服从 。接着,对于每一个 再去生成一次 rollout 来估计 。试验证明,在连续动作空间问题中, 直接使用 on-policy 可以取得不错效果,在离散空间问题中,使用uniform分布效果更好。
6. 转换成具体优化问题
再回顾一下现在的进度,12式定义了优化目标,约束项是KL divergence空间的trust region 形式。14式改写成了等价的期望形式,通过两种蒙特卡洛方法生成 state-action 数据集,可以代入14式得到每一步的具体数值的优化问题。论文这一部分简单叙述了如何高效但近似的解此类问题,详细的一些步骤在附录中阐述。我们把相关解读都放在下一节。
7. 和已有理论的联系
7.1 简化成 Natural Policy Gradient
再回到12式,即约束项是KL divergence空间的trust region 形式
对于这种形式的优化问题,一般的做法是通过对优化目标做一阶函数近似,即
并对约束函数做二阶函数近似,因为约束函数在 点取到极值,因此一阶导为0。
12式的优化目标可以转换成17式
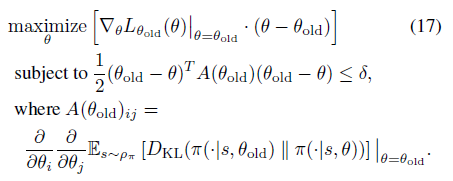
对应参数迭代更新公式如下

这个方法便是Kakade在2002年发表的 natrual policy gradient 论文。
7.2 简化成 Policy Gradient
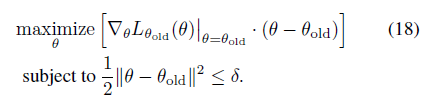
注意,的一阶近似的梯度
即PG定理
因此,PG定理等价于的一阶近似的梯度在 空间 约束下的优化问题,即18式
7.3 近似数值解法
这里简单描述关于17式及其参数更新规则中的大矩阵数值计算近似方式。
二阶近似中的 是 Hessian 方形矩阵,维度为 个数的平方。

直接构建 矩阵或者其逆矩阵 都是计算量巨大的, 注出现在natural policy update 更新公式中, 。
一种方法是通过构建Fisher Information Matrix,引入期望形式便于采样
另一种方式是使用conjugate gradient 方法,通过矩阵乘以向量快速计算法迭代逼近 。
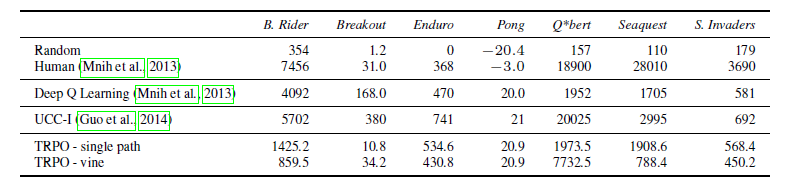
8. 试验结果
在两种强化学习模式下,比较TRPO和其他模型的效果。模式一是在MuJoCo模拟器中,这种环境下能得到真实状态的情况。
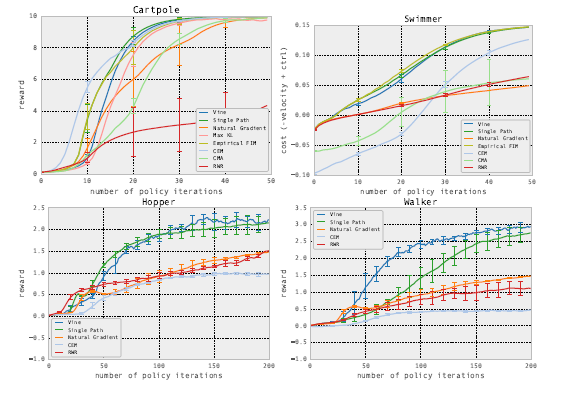
另一种模式是完全信息下的Atari游戏环境,这种环境下观察到的屏幕像素可以信息完全地表达潜在真实状态。
往期精彩回顾
获取本站知识星球优惠券,复制链接直接打开:
https://t.zsxq.com/qFiUFMV
本站qq群704220115。
加入微信群请扫码: