2D目标检测
[1] 域自适应对象检测的语义完全图匹配
SIGMA: Semantic-complete Graph Matching for Domain Adaptive Object Detection
[2] 通过语义对齐匹配加速 DETR 收敛
Accelerating DETR Convergence via Semantic-Aligned Matching
3D目标检测
[3] 自动驾驶中用于单目 3D 目标检测的伪立体
Pseudo-Stereo for Monocular 3D Object Detection in Autonomous Driving
[4] 在全景分割的指导下,用于基于 LiDAR 的 3D 对象检测的多功能多视图框架
A Versatile Multi-View Framework for LiDAR-based 3D Object Detection with Guidance from Panoptic Segmentation
[5] 在 3D 场景中实现稳健的定向边界框检测
Canonical Voting: Towards Robust Oriented Bounding Box Detection in 3D Scenes
[6] 带有形状引导标签增强的弱监督 3D 对象检测
Back to Reality: Weakly-supervised 3D Object Detection with Shape-guided Label Enhancement
[7] 用于 LiDAR 3D 对象检测的点密度感知体素
Point Density-Aware Voxels for LiDAR 3D Object Detection
[8] 用于多模态 3D 目标检测的激光雷达相机深度融合
DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection
[9] 单目 3D 目标检测的联合语义和几何成本量
MonoJSG: Joint Semantic and Geometric Cost Volume for Monocular 3D Object Detection
[10]通过 Dual Cross-VIew SpaTial Attention 提升 3D 对象检测
VISTA: Boosting 3D Object Detection via Dual Cross-VIew SpaTial Attention
伪装目标检测
[11] 视频伪装对象检测的隐式运动处理
Implicit Motion Handling for Video Camouflaged Object Detection
显著性目标检测
[12] 显著性排名的双向对象上下文优先级学习
Bi-directional Object-context Prioritization Learning for Saliency Ranking
[13] 共同显著性目标检测的综合特征挖掘
Democracy Does Matter: Comprehensive Feature Mining for Co-Salient Object Detection
边缘检测
[14] 使用transformer的边缘检测
EDTER: Edge Detection with Transformer
消失点检测
[15] 深度消失点检测:几何先验使数据集变化消失
Deep vanishing point detection: Geometric priors make dataset variations vanish

那么这些目标检测的论文怎样才能又好又快地吃透呢?
无非三个步骤:泛读、精读、代码复现。
这次我们请来了BAT算法工程师——张老师,推出【目标检测】论文精讲直播,为期2天,对论文和实验结果进行手把手分析,还有直播现场互动答疑,彻底夯实目标检测基础。
直播嘉宾:

—— 直播内容与安排 ——
1、6月23日20:30直播
1.为什么要学习目标检测论文
2.目标检测发展历程与前进方向
3.学习路径推荐
4.注意事项
2、6月24日20:30直播
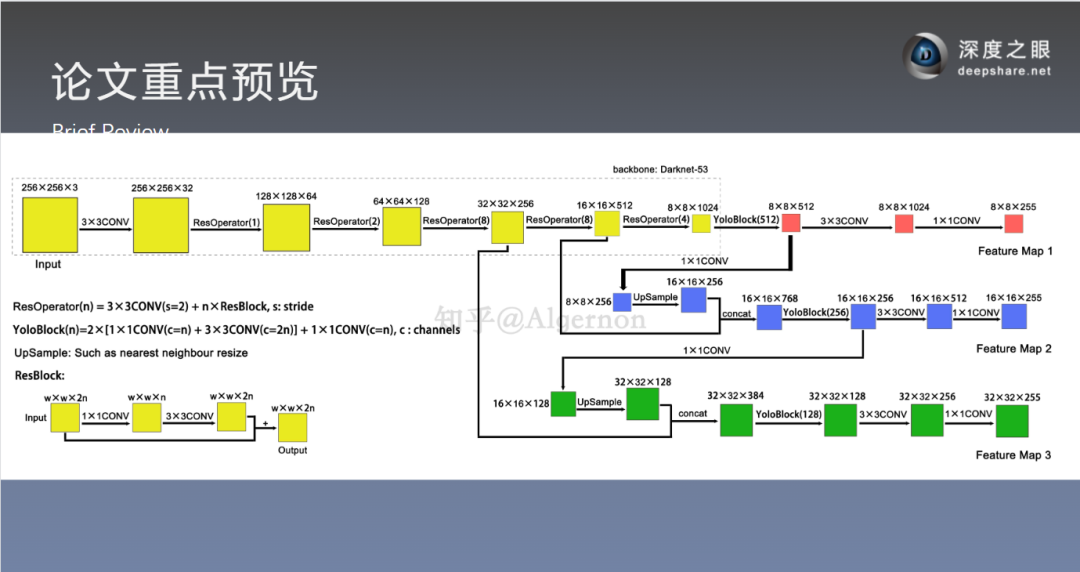
1.YOLO V3论文精读
2.YOLO V3细节讲解
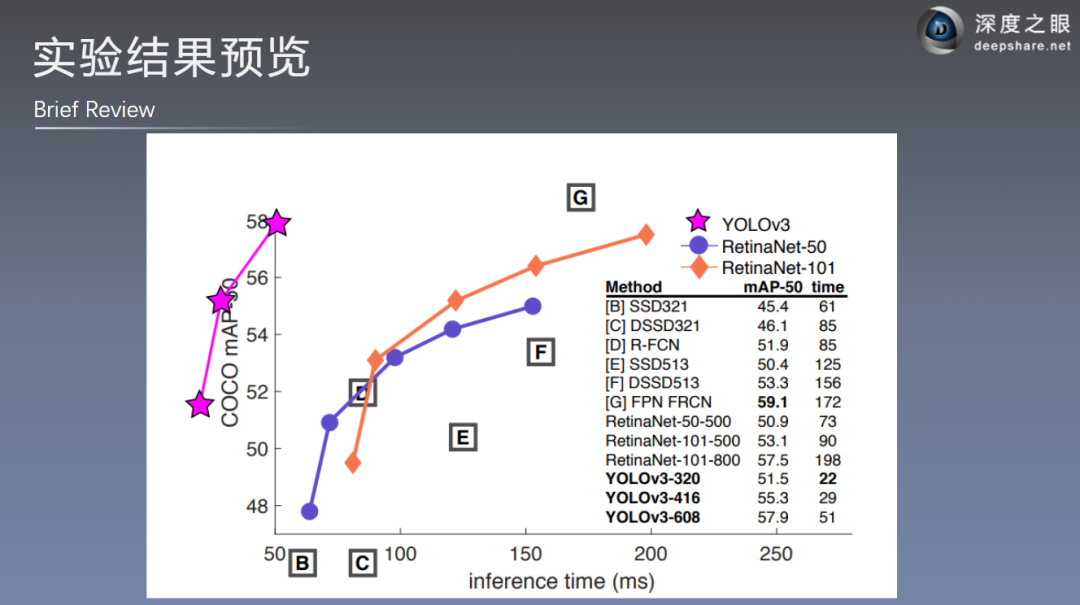
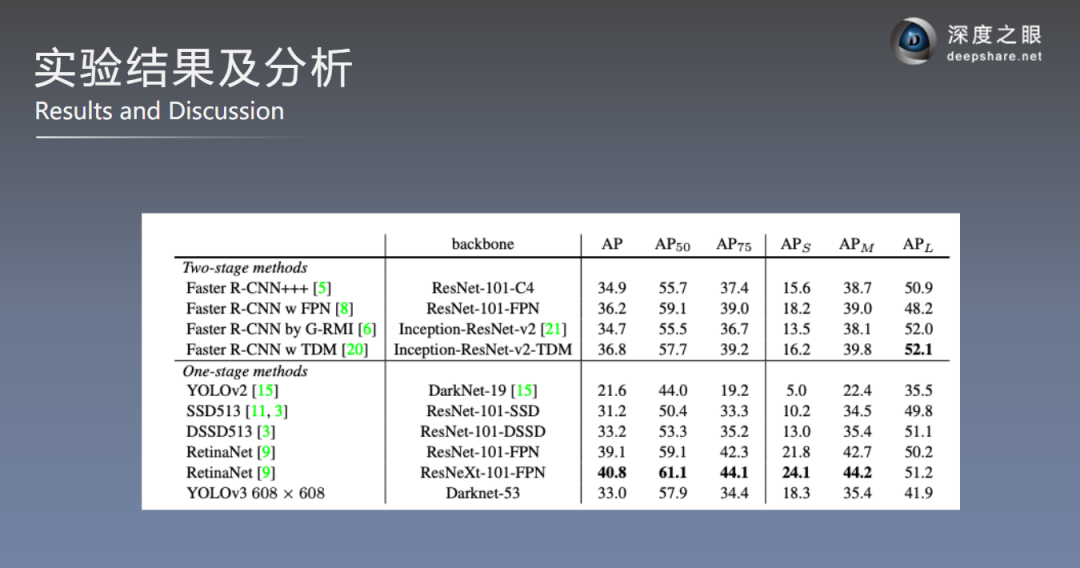
3.实验结果分析
4.论文总结
↓ 前方福利 ↓
原价399元,现在0.1元领取!
还在等什么!抓紧扫码上车吧!

扫码添加客服 即可领取↓
回复“目标检测论文”免费领目标检测论文PDF

