
7篇遥感分割CV论文带你冲榜赢10万奖金!更有100h免费算力提供
点击上方“CVer”,选择加"星标"置顶
重磅干货,第一时间送达
中国计算机学会举办的CCF 大数据与计算智能大赛(CCF BDCI)正式开启,本届大赛首度设立了全新的“自主平台”赛道,百度首发 “遥感影像地块分割” 赛题,飞桨作为该赛题的指定深度学习平台为选手提供技术支持,并提供10万元现金奖池。
比赛算力不够用?报名练习赛就能申请100小时Tesla V100 GPU 算力卡!
百度大脑AI Studio练习场为参赛选手额外发放100小时算力卡,更有官方Baseline可一键fork。还不快进群get报名链接?
遥感领域不熟悉,无从下手?出题老师亲授思路!
来自百度的出题老师已对赛题进行了详尽讲解,45分钟超长解析,从0为你讲解遥感领域知识背景,传授模型调优思路,快快进群get直播录像链接!
竞赛讨论群
快快进群和百度工程师交流
练习赛报名地址
快快报名申请100小时GPU算力
不仅如此,出题老师精心挑选了7篇顶会级论文,快快借鉴大咖思路冲榜吧!
赛题简介
遥感影像地块分割, 旨在对遥感影像进行像素级内容解析,对遥感影像中感兴趣的类别进行提取和分类,在城乡规划、防汛救灾等领域具有很高的实用价值,在工业界受到了广泛关注。
本次大赛希望选手能够利用人工智能技术,对多来源、多场景的异构遥感影像数据进行充分挖掘,打造高效、实用的算法,提高遥感影像的分析提取能力。具体来看,需要考察选手基于飞桨打造的遥感影像语义分割模型在建筑、耕地、林地、水体、道路、草地6个类别上的效果。
在复赛阶段,测评指标会加入区域连续性等评判标准。由于遥感影像的特殊性,道路、河流分割一直是遥感领域的一大难题。道路、河流这类区域在遥感图像上宽度一般不超过10个像素,使用视觉算法进行分割时,往往不能保证这类区域被完整、连续地分割出来。复赛阶段就是针对这类实际难题展开角逐。
论文指路
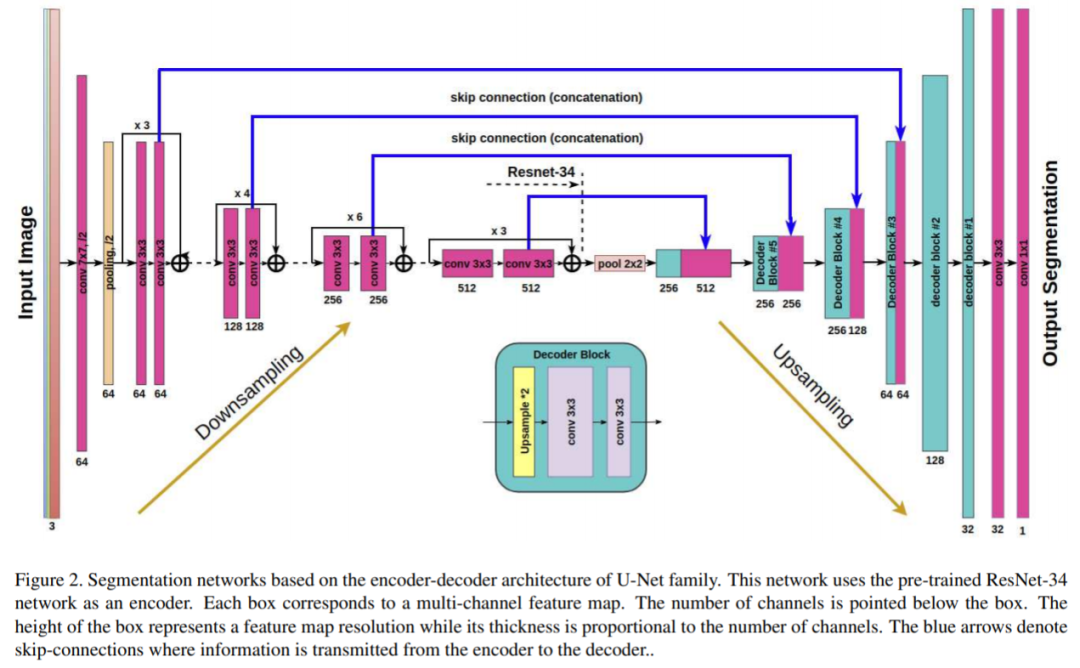
1. 基于全卷积网络的卫星图像道路自动提取
Fully Convolutional Network for Automatic Road Extraction from Satellite Imagery
论文地址:
https://openaccess.thecvf.com/content_cvpr_2018_workshops/papers/w4/Buslaev_Fully_Convolutional_Network_CVPR_2018_paper.pdf
简介:
高分辨率卫星图像分析一直是交通管理、城市规划和道路监测的重要研究课题。其中一个问题是自动、精确地提取道路。从原始图像中,由于存在其他具有直线的道路特征,提取道路很困难且计算成本很高。本文提出了一种基于U-net家族全卷积神经网络的道路自动提取方法。该网络由在ImageNet上预训练的ResNet-34和分割网络vanilla U-Net组成。根据验证结果,排行榜和作者的经验表明,该网络在“DEEPGLOBE - CVPR 2018 road extraction sub-challenge”中显示了优越的结果。此外,该网络使用中等内存,只允许使用一个GTX 1080或1080ti来执行整个训练,并做出相当快的预测。
2. 遥感影像解译基准数据集的建立
DiRS: On Creating Benchmark Datasets for Remote Sensing Image Interpretation
论文地址:https://arxiv.org/abs/2006.12485
简介:
近十年来,遥感影像解译取得了巨大的进步,其应用范围也越来越广。因遥感图像变得更容易获取,对这些图像自动解析的需求也就越来越大。在这之中,基准数据集成为了开发和测试算法智能度的必要先决条件。本文在回顾了国内外遥感影像解译研究领域现有的基准数据集的基础上,探讨了如何有效地为遥感影像分析准备一个合适的基准数据集。
3. 基于EOSResUNet和后向量化算法的道路检测
Road detection with EOSResUNet and post vectorizing algorithm
论文地址:
https://openaccess.thecvf.com/content_cvpr_2018_workshops/papers/w4/Filin_Road_Detection_With_CVPR_2018_paper.pdf
简介:
卫星图像目标识别是模式识别中最热门的课题之一。大量高分辨率的卫星图像、计算机视觉领域的重大发展(特别是卷积神经网络领域的重大突破)、广泛的行业应用领域以及仍旧相当开阔的市场都造就了卫星图像目标识别的热度。在这之中,道路是最受欢迎的识别对象之一。在这篇文章中,我们想把神经网络和后处理算法结合起来,这样我们不仅可以得到覆盖mask,而且还可以得到图像中所有单独道路的矢量,这些矢量可以用于将来处理更高级别的任务。该方法用于解决DeepGlobe道路开采难题。
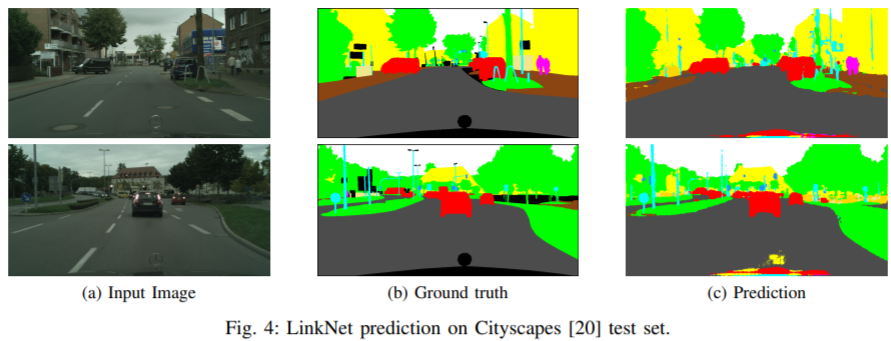
4. LinkNet:利用编码器表示进行有效的语义分割
LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation
论文地址:https://arxiv.org/abs/1707.03718
简介:
针对视觉场景的像素级语义分割不仅需要精确,而且要高效,这样才能在实时应用中找到用处。现有的算法虽然是精确的,但并没有把重点放在有效利用神经网络的参数上。因此,从参数和运算次数角度来看这些算法都非常庞大,因此速度也很慢。在这篇论文中,我们提出一个新的深层神经网路架构,使得它可以在不显著增加参数数目的情况下进行学习。我们的网络仅使用1150万个参数和21.2 GFLOPs来处理分辨率为3×640×360的图像。它在CamVid上展示了最先进的性能,并在Cityscapes数据集上给出了可比较的结果。我们在NVIDIA GPU和嵌入式系统设备上比较了我们的网络与现有的最先进的网络在不同分辨率图像下的处理时间。
5. 基于深度残差U-Net的道路提取
Road Extraction by Deep Residual U-Net
论文地址:https://arxiv.org/abs/1711.10684
简介:
从航空影像中提取道路一直是遥感影像分析领域的研究热点。本文结合残差学习和U-Net的优点,提出了一种用于道路区域提取的语义分割神经网络。该网络采用残差构建,具有与U-Net相似的体系结构。这种模式的好处有两个:第一,残差结构可以简化深层网络的训练。第二,网络中丰富的跳跃连接可以促进信息传播,使我们能够设计更少参数但的到性能更好的网络。我们在一个公共道路数据集上测试了这一网络,并将其与U-Net和其他两种基于深度学习的道路提取方法进行了比较,该方法的性能更优。
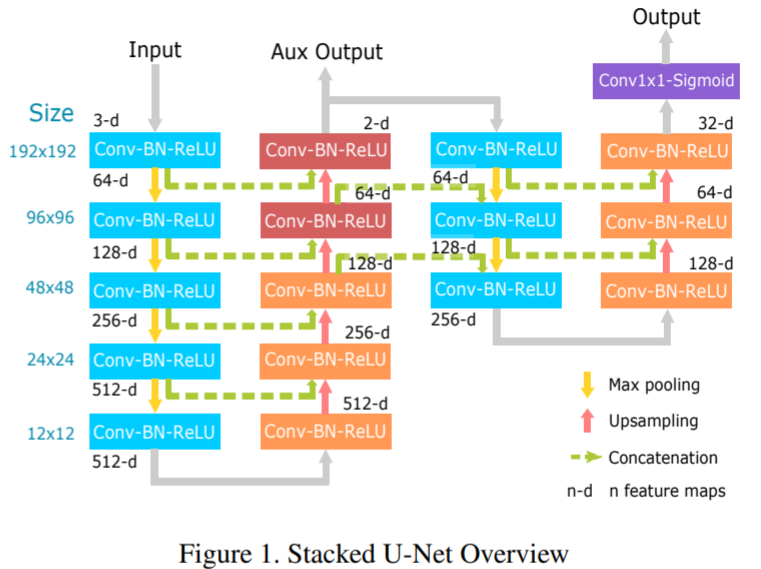
6. 用于道路提取的多输出堆叠U-Net
Stacked U-Nets with Multi-Output for Road Extraction
论文地址:
https://openaccess.thecvf.com/content_cvpr_2018_workshops/papers/w4/Sun_Stacked_U-Nets_With_CVPR_2018_paper.pdf
简介:
随着卷积神经网络(CNN)在计算机视觉领域的发展,从卫星图像中提取道路和其他特征用于制图和其他目的的研究取得了迅速进展。本文提出了一种新的基于多输出叠加U-Net的道路提取方法。采用混合损失函数来解决训练数据类别不平衡的问题。后处理方法(包括路线图矢量化和具有分层阈值的最短路径搜索)有助于提高召回率。与普通VGG网络相比,平均IoU的总体改进超过20%。
7. D-LinkNet:带有预训练编码器和空洞卷积的LinkNet,用于高分辨率卫星图像道路提取
D-LinkNet: LinkNet with Pretrained Encoder and Dilated Convolution for High Resolution Satellite Imagery Road Extraction
论文地址:
https://openaccess.thecvf.com/content_cvpr_2018_workshops/papers/w4/Zhou_D-LinkNet_LinkNet_With_CVPR_2018_paper.pdf
简介:
道路提取是遥感领域的一项基础性工作,也是近十年来研究的热点。本文提出了一种语义分割神经网络D-LinkNet,它采用编码器-解码器结构、空洞卷积和预训练编码器来完成道路提取任务。该网络采用LinkNet体系结构,中心部分有扩张的卷积层。Linknet体系结构具有高效的计算和存储能力。空洞卷积是一种在不降低特征地图分辨率的前提下,扩大特征点感受野的有力工具。在CVPR DeepGlobe 2018道路提取挑战赛中,我们在验证集和测试集上的最佳IoU分数分别为0.6466和0.6342。