
自监督学习的一些思考
作者:Xiaohang Zhan
来源:知乎
链接:https://zhuanlan.zhihu.com/p/150224914
注:本文已获作者授权转载,未经作者同意禁止二次转载
自监督学习的流行是势在必然的。在各种主流有监督学习任务都做到很成熟之后,数据成了最重要的瓶颈。从无标注数据中学习有效信息一直是一个很重要的研究课题,其中自监督学习提供了非常丰富的想象空间。
如何定义自监督学习?
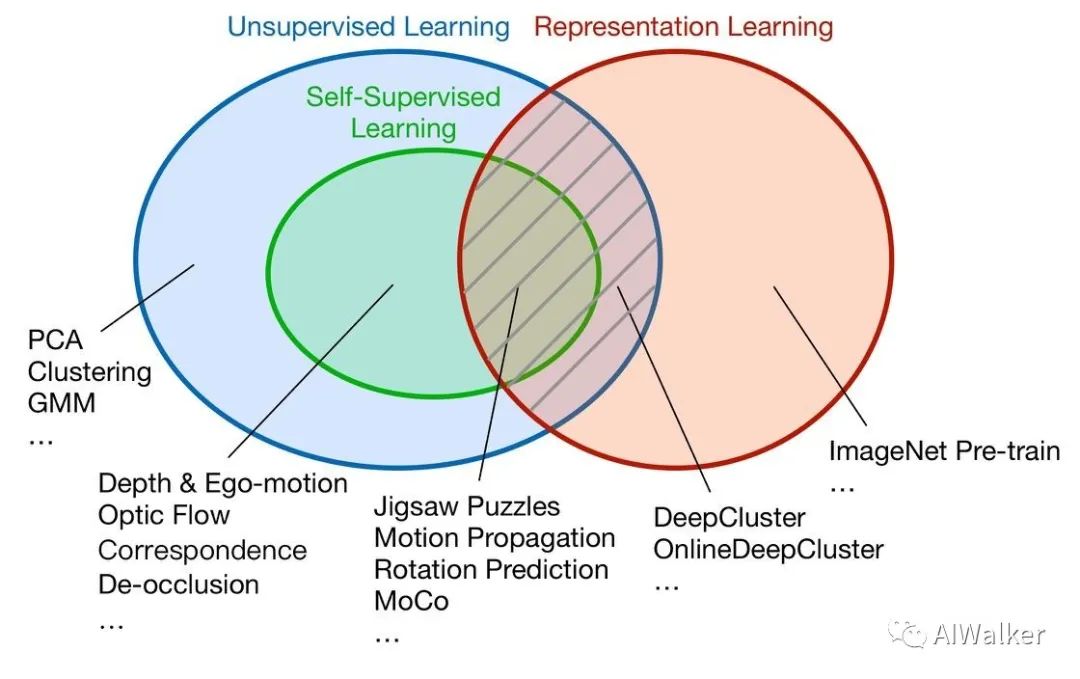
自监督学习是指用于机器学习的标注(ground truth)源于数据本身,而非来自人工标注。如下图,自监督学习首先属于无监督学习,因此其学习的目标无需人工标注。其次,目前的自监督学习领域可大致分为两个分支。第一个是用于解决特定任务的自监督学习,例如上次讨论的场景去遮挡,以及自监督的深度估计、光流估计、图像关联点匹配等。另一个分支则用于表征学习。有监督的表征学习,一个典型的例子是ImageNet分类。而无监督的表征学习中,最主要的方法则是自监督学习。典型的方法包括:解决Jigsaw Puzzles、运动传播、旋转预测,以及最近很火的MoCo等等。当然还有其他分类方法,比如根据数据也可以分为video / image / language的自监督学习。本文主要讨论image上的自监督学习。
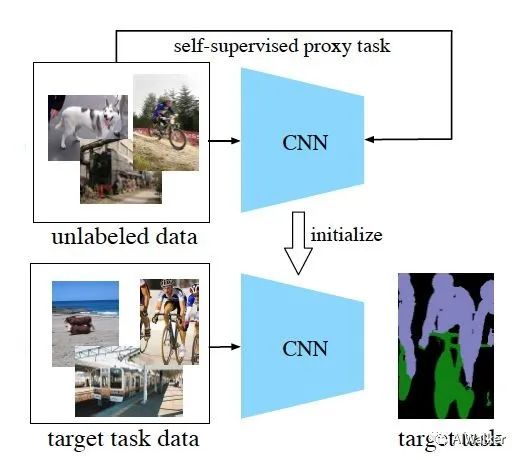
判断一个工作是否属于自监督学习,除了无需人工标注这个标准之外,还有一个重要标准,就是是否学到了新的知识。举个简单的例子,例如image inpainting是否属于自监督学习?如果一篇image inpainting的论文,其主要目的是提升inpainting的效果,那么它就不属于自监督学习,虽然它无需额外标注。但是如果它的目的是借助inpainting这个任务来学习图像的特征表达,那么它就是自监督学习(参考论文:Context Encoders [1])。如下图,以自监督表征学习为例,我们通常需要设计一个自监督的proxy task,我们期望在解决这个proxy task的过程中,CNN能学到一些图像高级的语义信息。然后我们将训练好的CNN迁移到其他目标任务,例如图像语义分割、物体检测等等。
那么,自监督的proxy task有哪些呢?如下图举了一些有代表性的例子,第一行中的思路是将图像以某种方式破坏,然后用神经网络来学习恢复原图的过程,期望在此过程中能学到一些图像语义信息。然而,将图像破坏,可能带来预训练的domain和目标任务domain不一致的问题。第二行中的proxy tasks则代表了无需破坏原图的自监督任务。第三行中的方法是利用运动信息等多模态信息来学习图像特征。当然除了图中这些例子之外,还有各种各样其他有趣的自监督任务。

为什么自监督学习能学到新信息 ?
1. 先验
我们的世界是在严格的物理、生物规则下运行的,那么对这个世界的观测结果(图像)也必然存在一些先验规律。例如图像上色任务,就是利用了物体类别和物体颜色分布之间的关联;image inpainting,则是利用了物体类别和形状纹理之间的关联;旋转预测任务,利用了物体类别和其朝向之间的关联。通过挖掘更多的先验,我们也能设计自己的自监督学习任务。
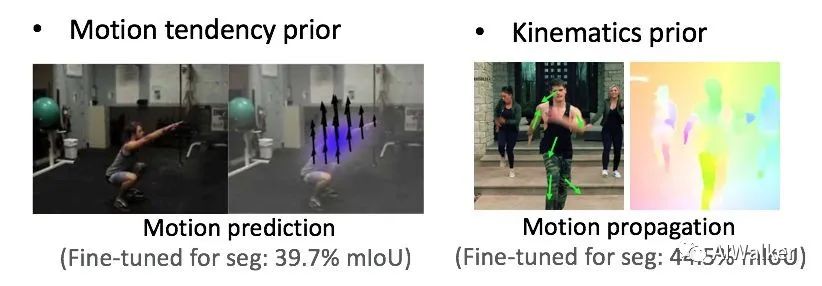
那么什么样的先验更有效呢?结论是,低熵的先验。如下图,左边的运动预测任务(ICCV 2015: Dense Optical Flow Prediction From a Static Image [2]) ,是从单张图片中直接预测运动场,其利用的先验是物体的运动倾向性。而运动倾向性是比较歧义的,例如人在半蹲状态,难以预测下一时刻会站起来还是继续下蹲。因而,运动倾向性是一个高熵的先验。而右图的运动传播任务(CVPR 2019: Self-Supervised Learning via Conditional Motion Propagation [3]),从给定的稀疏运动来恢复完整运动场,利用的则是物体的运动学属性先验。运动学属性,例如头部是刚体,四肢是铰接体等,是较为确定的先验,那么这就是一个低熵的先验。从实验结果也可以发现,在transfer到分割任务上,运动传播比运动预测更好。
2. 连贯性
图片具有空间连贯性,视频具有时空连贯性。那么就可以利用这些特点来设计自监督任务。如下图,Solving Jigsaw Puzzles [4] 利用图片中物体空间上的语义连贯性,Temporal order verification [5]任务利用了视频中物体运动的时间连贯性。

3. 数据内部结构
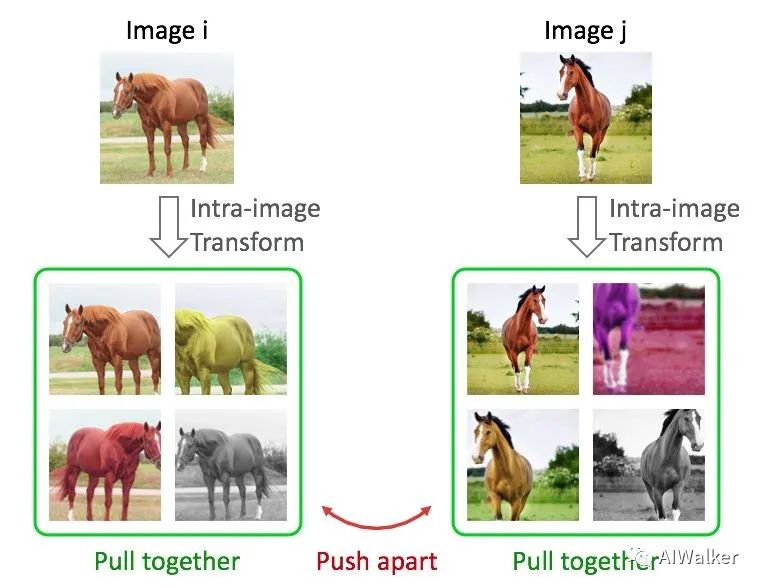
目前很火的基于contrastive learning的方法,包括NPID, MoCo, SimCLR等,我们可以将它们统一为instance discrimination [6]任务。如下图,这类任务通常对图片做各种变换,然后优化目标是同一张图片的不同变换在特征空间中尽量接近,不同图片在特征空间中尽量远离。
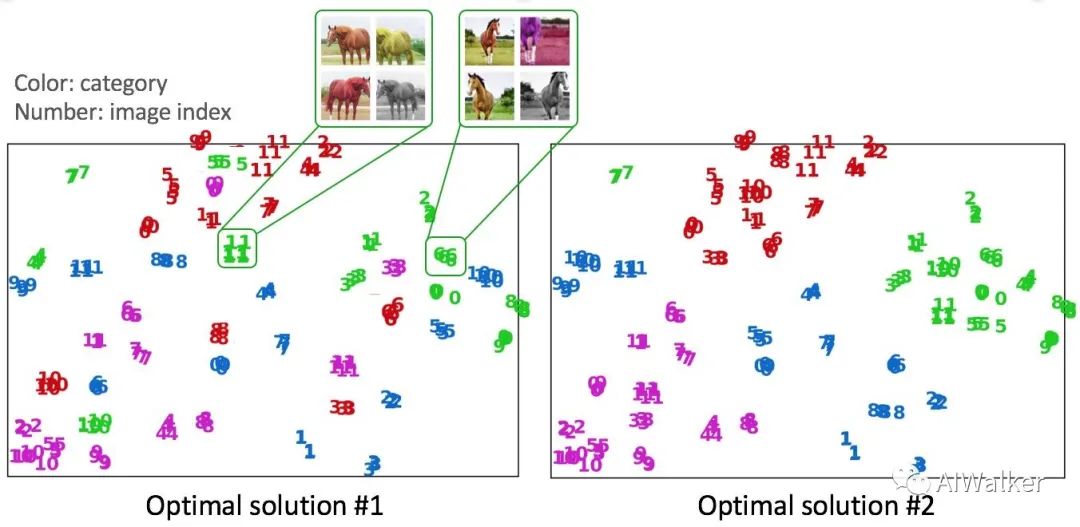
对于这类任务,下图假设了两种可能的优化后的特征空间。这两种结果都是符合instance discrimination优化目标的,即同一张图片的不同变换在特征空间中尽量接近,不同图片在特征空间中尽量远离。然而,我们发现,实际的优化结果更偏向于第二种而非第一种,也就是说,虽然我们在解决instance discrimination的过程中并没有用的物体的类别标签,但是在优化后的特征空间中,同类的物体还是相对能够靠拢。这就证明了,数据之间是具有结构性和关联性的。Instance discrimination则是巧妙地利用了这种结构性和关联性。类似地,最近的BYOL [7]也可能是利用了数据在特征空间中的分布结构特点来抛弃负样本对(个人理解)。
设计一个自监督学习任务还需要考虑什么?
捷径(shortcuts)
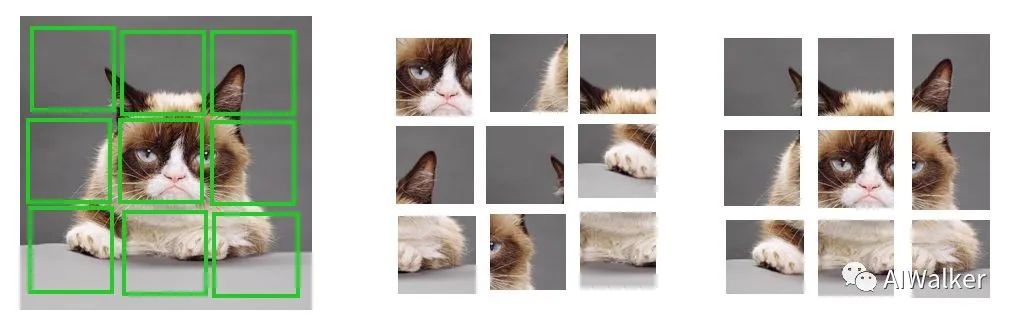
以jigsaw puzzles为例,如下图,如果我们让划分的patch之间紧密挨着,那么神经网络只需要判断patch的边缘是否具有连续性,就可以判断patch的相对位置,而不需要学到高级的物体语义信息。这就是一种捷径,我们在设计任务的过程中需要避免这样的捷径。

对于这种捷径,处理的方式也很简单,我们只需要让patch之间产生一些随机的间隔就行,如下图。
Solving jigsaw puzzles的其他捷径还包括色差、彗差、畸变、暗角等可以指示patch在图像中的相对位置的信息。解决方案除了想办法消除这些畸变外,还可以让patch尽量靠近图像中心。

2. 歧义性(Ambiguity)
大多数利用先验来设计的自监督任务都会面临歧义性问题。例如colorization中,一种物体的颜色可能是多种多样的,那么从灰度图恢复颜色这个过程就具有ambiguity;再例如在rotation prediction中,有的物体并没有一个通常的朝向(例如俯拍放在桌上的圆盘子)。有不少已有工作在专门解决特定任务的歧义性问题,例如CVPR 2019的Self-Supervised Representation Learning by Rotation Feature Decoupling。另外就是设计低熵的先验,因为低熵的先验也具有较低的歧义性。
3. 任务难度
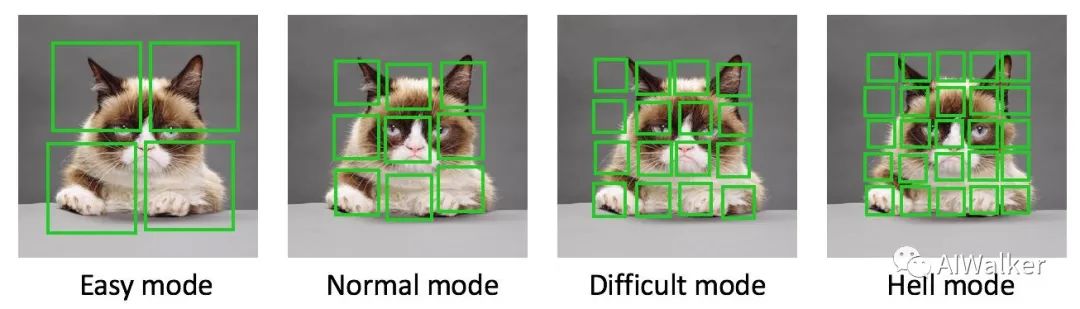
神经网络就像一个小孩,如果给他太简单的任务,他学不到有用的知识,如果给他太难的任务,他可能直接就放弃了。设计合理的难度也是一个需要考虑的方面。
展望
我们的世界是在严格的物理学、化学、生物学规则下运行的,视觉信号是这些内在规则的外在反映,而深度学习,正好非常擅长处理高维的视觉信号。所以,无监督、自监督学习的存在和发展是必然的,因为世界本身就是有序的、低熵的,这使得数据本身就已经包含了丰富的信息。自监督学习看似神奇,但理解了其本质之后,也就会觉得是情理之中了。当然,目前学术界对自监督学习的理解程度,可能也只是九牛一毛而已。未来会走向什么方向,谁也说不准。目前是基于数据之间的结构的instance discrimination处于state-of-the-art,未来,基于priors的方法更胜一筹也是有可能的。所以,千万不要受限于一类方法,不要让自监督学习变成了调参游戏,自监督领域的想象力空间其实非常大。
最后,这个总结主要基于自己的思考,也许不一定非常到位,权当抛砖引玉。希望大家都能够设计出有趣又有用的自监督学习任务,为这个领域添砖加瓦。
References:
1. Pathak, Deepak, et al. "Context encoders: Feature learning by inpainting."Proceedings of the IEEE conference on computer vision and pattern recognition. 2016.
2. Walker, Jacob, Abhinav Gupta, and Martial Hebert. "Dense optical flow prediction from a static image."Proceedings of the IEEE International Conference on Computer Vision. 2015.
3. Zhan, Xiaohang, et al. "Self-supervised learning via conditional motion propagation." Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2019.
4. Noroozi, Mehdi, and Paolo Favaro. "Unsupervised learning of visual representations by solving jigsaw puzzles."European Conference on Computer Vision. Springer, Cham, 2016.
5. Misra, Ishan, C. Lawrence Zitnick, and Martial Hebert. "Shuffle and learn: unsupervised learning using temporal order verification."European Conference on Computer Vision. Springer, Cham, 2016.
6. Wu, Zhirong, et al. "Unsupervised feature learning via non-parametric instance discrimination."Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2018.
7. Grill, Jean-Bastien, et al. "Bootstrap Your Own Latent: A New Approach to Self-Supervised Learning."arXiv preprint arXiv:2006.07733(2020).