
原理+代码实战 | 双目视觉中的极线校正
共 19470字,需浏览 39分钟
·
2021-07-14 17:09
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:计算机视觉life
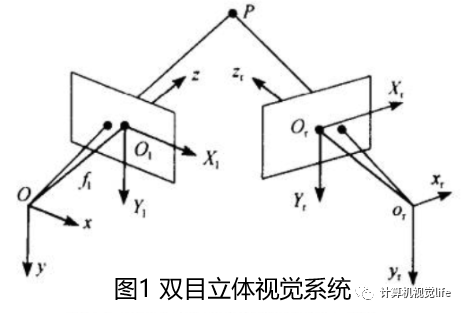
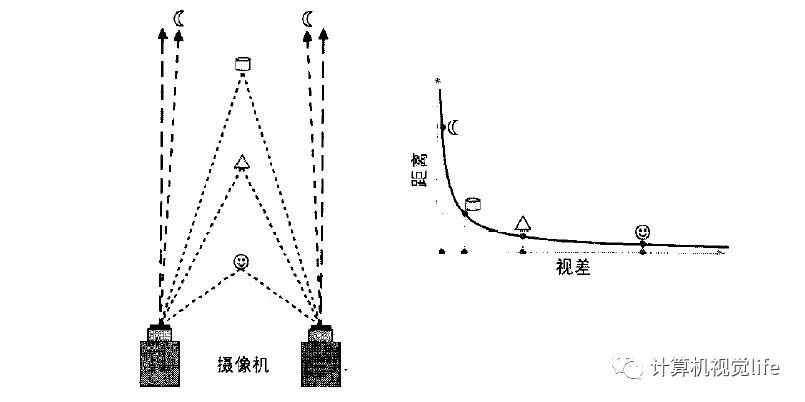
三维重建是通过双目立体匹配实现的如图1,通过匹配空间中点在两个图像中的投影点,再根据三角关系得到P的Z值。
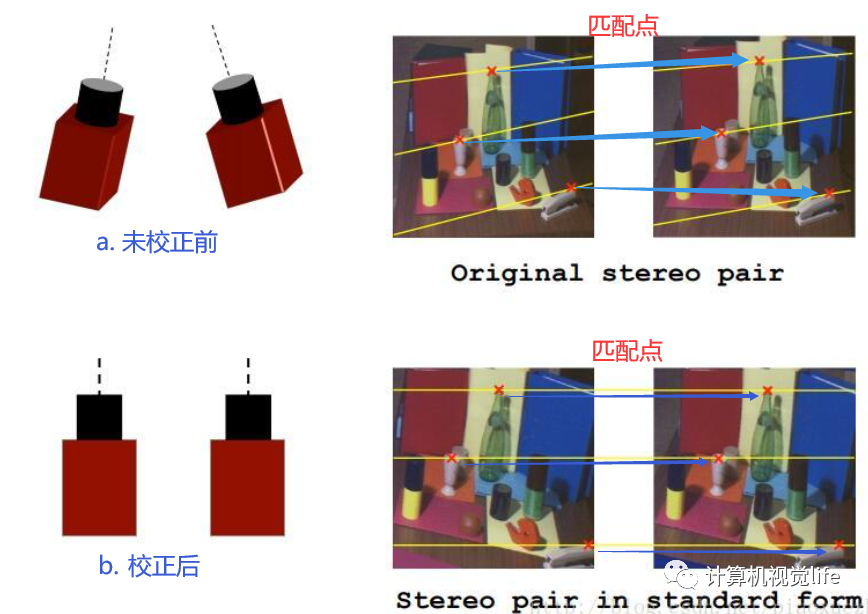
我们双目相机拍摄的时候实际情况下如下图a,两个图像做匹配时如我们图中蓝色箭头指示的匹配点那样,需要在全图中进行查找。但是如果我们对相机进行校正,使得它们成像面平行且行对齐如下图b,匹配点在同一行。那么我们只需在同行上查找,大大节约时间。因此,极线校正目的是对两幅图像的二维匹配搜索变成一维,节省计算量,排除虚假匹配点。
1.齐次坐标,刚体变换
齐次坐标
用n+1维矢量表示n维矢量,主要用途是可以方便矩阵运算。(参考下式)
刚体变换
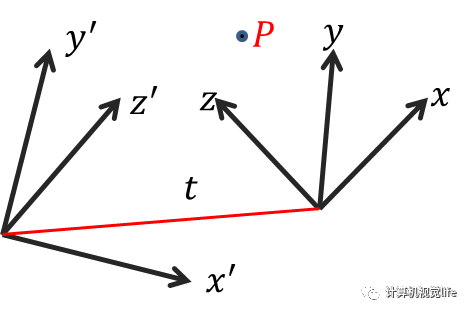
假设欧式空间中一点P,在两个坐标系中的坐标分别为和,那么图中变换公式:
即:
用齐次坐标表示:
刚性物体无论位置和方向发生变换还是在不同坐标系下观察同一个物体,它的形状和大小都保持不变;
3个旋转3个平移共6个自由度; 用途: 计算一个刚体经过旋转和平移后的新坐标 ;
计算同一刚体在不同坐标系下的坐标。
2.图像坐标系,相机坐标系,世界坐标系
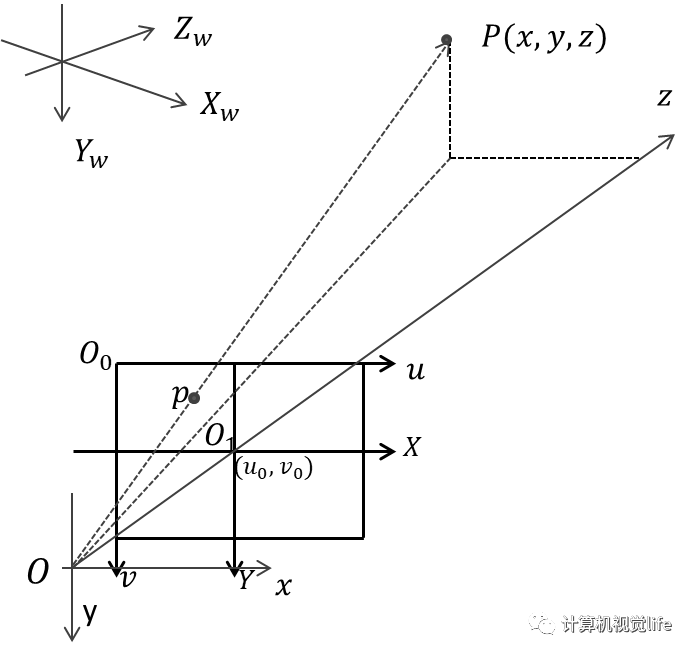
图像坐标系

上图中,是表示以像素为单位的图像坐标系的坐标,是以mm为单位的图像坐标系的坐标,是相机光轴与图像的交点其对应的像素坐标,每个像素在轴和轴对应的物理尺寸。两者转换关系如下:
用矩阵的表示形式:
逆关系:
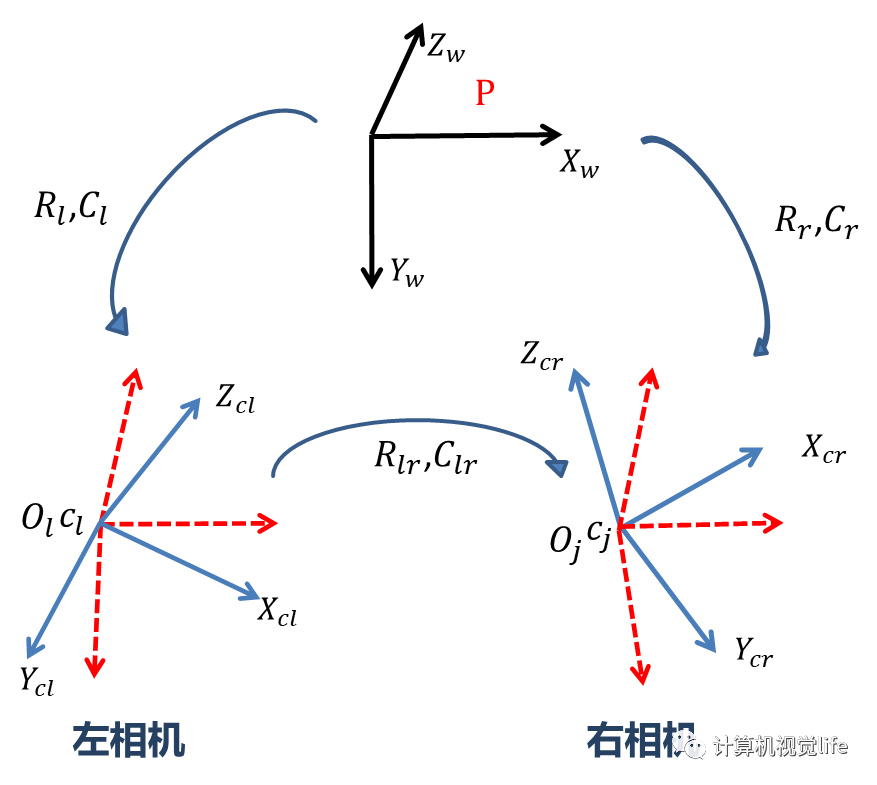
相机与世界坐标系
为相机光心,轴与图像的轴平行,轴为相机光轴与相机图像平面垂直交点就是图像坐标原点。与组成的直角坐标系为相机坐标系,为焦距。
世界坐标系与相机坐标系转换关系:
式中为3x3的正交单位矩阵,为三维平移向量,,为4x4矩阵。
3.相机投影模型(针孔投影模型)
把图像平面放到针孔前方(数学上等价,计算更简单):
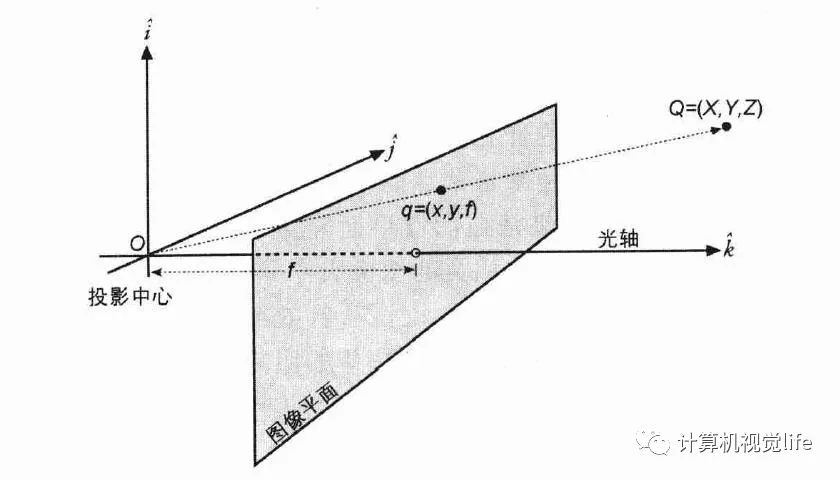
当已知图像点p时,由针孔成像模型,任何位于射线OP上的空间点的图像点都是p点,因此空间点不是唯一确定的。
投影关系(从世界坐标系到图像坐标系)
称为归一化焦距,只与相机内部参数有关,被称为相机内参;由相机相对世界坐标系的方位决定,被称为相机外参。确定相机内外参数被称为相机标定。
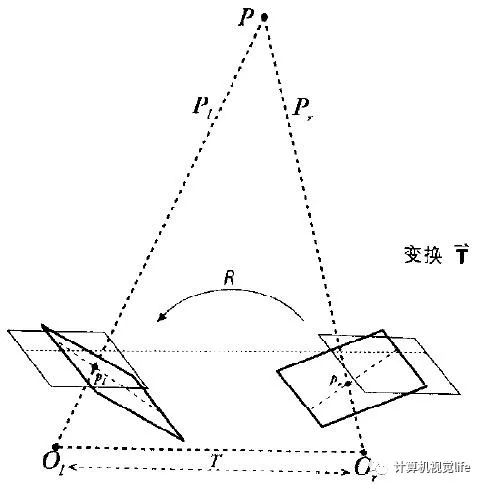
4.对极几何
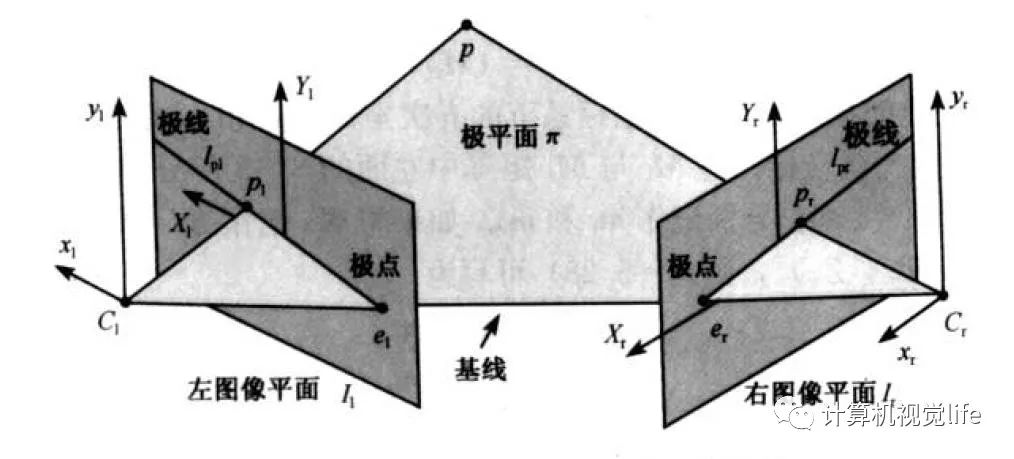
极点:极点:右相机坐标原点在左像平面上的像;极点:左相机坐标原点在右像平面上的像
极平面:由两个相机坐标原点、和物点组成的平面
极线:极平面与两个像平面的交线
极线约束:给定图像上的一个特征,它在另一幅图像上的匹配视图一定在对应的极线上,即已知则它对应在右图的匹配点一定在极线上反之亦然。
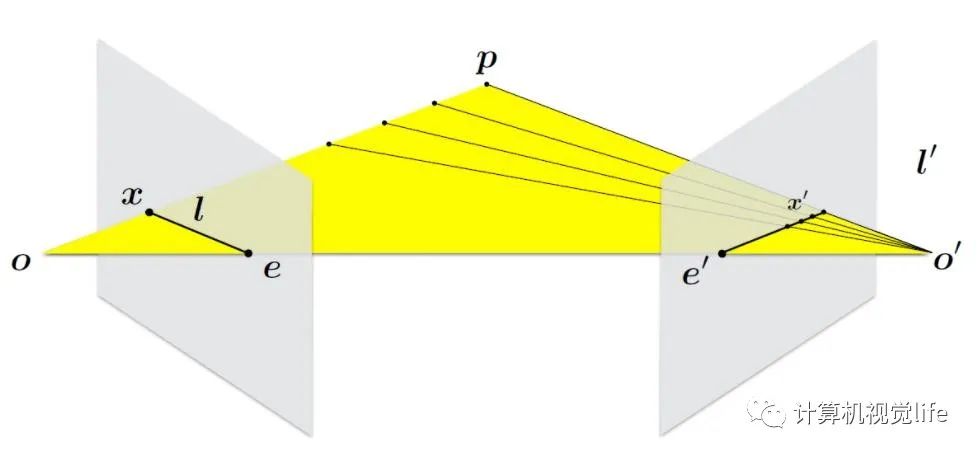
极线约束给出了对应点重要的约束条件,它将对应点匹配从整幅图像中查找压缩到一条线上查找,大大减小了搜索范围,对对应点的匹配起指导作用。
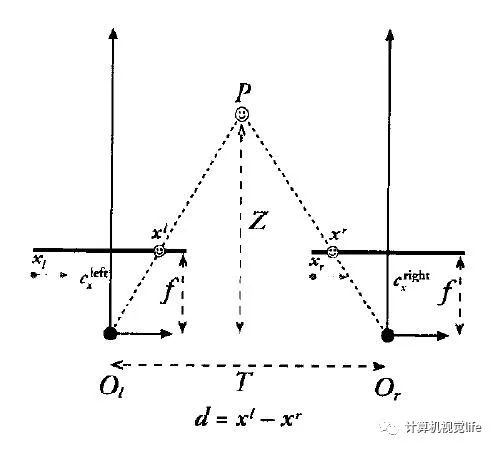
1.三角测量原理
假设我们两台摄像机像平面精准位于同一平面上,且行对齐,两个光轴严格平行。
利用三角形关系我们很容易推出Z值:
左右滑动可以查看完整公式
如果主点坐标相同则可简化为:
因为视差,且为我们的深度值,故:
视差与深度图关系:
视差与深度成反比,视差接近0时,微小的视差变化会产生较大的深度变化
当视差较大时,微小的视差变化几乎不会引起深度多大的变化
因此,立体视觉系统仅物体距离相机较近时具有较高的深度精度
2.极线校正原理
校正过程:将相机在数学上对准到同一观察平面上,使得相机上像素行是严格对齐的
校正目的:对两幅图像的二维匹配搜索变成一维,节省计算量,排除虚假匹配点
3.校正算法步骤:(参考文献A compact algorithm for rectification of stereo pairs)
为了将摄相机极点变换到无穷远使得极线水平对准,我们创建一个旋转矩阵,首先是轴的旋转,我们将轴旋转到与基线相同的方向即旋转后新轴就是,旋转向量:
确定旋转后的新轴,只需满足与正交即可:选则与主光轴和相交的方向:
新的轴,与垂直且满足右手定则:
最终得到的旋转矩阵:
则左右两个图像新的旋转矩阵:
4.校正后,baseline 计算:
下式中是指左相机光心在右相机坐标系下的坐标(也等于与右相机光心[0,0,0]的距离),求解公式的意义是左相机光心在右相机校正后的坐标系下的坐标(也等于与右相机校正后的坐标系下光心[0,0,0]的距离)。故baseline就是轴方向的距离。
// see: "A compact algorithm for rectification of stereo pairs", A. Fusiello, E. Trucco, and A. Verri, 2000
// 极线校正
REAL Camera::StereoRectifyFusiello(const cv::Size& size1, const Camera& camera1, const cv::Size& size2, const Camera& camera2, Matrix3x3& R1, Matrix3x3& R2, Matrix3x3& K1, Matrix3x3& K2)
{
// compute relative pose
// 计算相对位姿
RMatrix poseR;
CMatrix poseC;
ComputeRelativePose(camera1.R, camera1.C, camera2.R, camera2.C, poseR, poseC);
// new x axis (baseline, from C1 to C2)
// 新的x轴,基线方向
const Point3 v1(camera2.C-camera1.C);
// new y axes (orthogonal to old z and new x)
// 新的y轴,垂直旧的Z轴(光轴)和新的X轴
const Point3 v2(camera1.Direction().cross(v1));
// new z axes (no choice, orthogonal to baseline and y)
// 新的Z轴,垂直上面两个新轴
const Point3 v3(v1.cross(v2));
// new extrinsic (translation unchanged)
// 新的外参,平移不变
RMatrix R;
R.SetFromRowVectors(normalized(v1), normalized(v2), normalized(v3));
// new intrinsic (arbitrary)
// 新的内参
K1 = camera1.K; K1(0,1) = 0;
K2 = camera2.K; K2(0,1) = 0;
K1(1,1) = K2(1,1) = (camera1.K(1,1)+camera2.K(1,1))/2;
// new rotations
// 新的选择从校正前的相机坐标系转到校正后的相机坐标系
R1 = R*camera1.R.t();
R2 = R*camera2.R.t();
// 计算新的基线距离
const Point3 t(R2 * (poseR*(-poseC)));
ASSERT(ISEQUAL(-t.x, norm(v1)) && ISZERO(t.y) && ISZERO(t.z));
return t.x;
} // StereoRectifyFusiello视差图是校正后的坐标系下得到的值,首先将其转换为校正后坐标系下的深度图
已知:
把上式写成矩阵形式:
式中定义如下:
将校正后的坐标系下深度图转换到校正前的相机坐标系下
已知:校正前的相机坐标系下坐标转到校正后相机坐标系下坐标转换关系如下:
则已知校正后的求校正前的公式如下:
再将其投影到图像坐标系下:
即:
将上两步合并得到校正后坐标系下的视差图与校正前的坐标系下的深度图的转换矩阵
已知:
代码实现
转换矩阵求解
(左右滑动可以查看完整公式)
bool Image::StereoRectifyImages(const Image& image1, const Image& image2, const Point3fArr& points1, const Point3fArr& points2, Image8U3& rectifiedImage1, Image8U3& rectifiedImage2, Image8U& mask1, Image8U& mask2, Matrix3x3& H, Matrix4x4& Q)
{
ASSERT(image1.IsValid() && image2.IsValid());
ASSERT(image1.GetSize() == image1.image.size() && image2.GetSize() == image2.image.size());
ASSERT(points1.size() && points2.size());
#if 0
{ // display projection pairs
std::vector<Point2f> matches1, matches2;
FOREACH(i, points1) {
matches1.emplace_back(reinterpret_cast<const Point2f&>(points1[i]));
matches2.emplace_back(reinterpret_cast<const Point2f&>(points2[i]));
}
RECTIFY::DrawMatches(const_cast<Image8U3&>(image1.image), const_cast<Image8U3&>(image2.image), matches1, matches2);
}
#endif
// compute rectification
// 校正计算
Matrix3x3 K1, K2, R1, R2;
#if 0
const REAL t(Camera::StereoRectify(image1.GetSize(), image1.camera, image2.GetSize(), image2.camera, R1, R2, K1, K2));
#elif 1
const REAL t(Camera::StereoRectifyFusiello(image1.GetSize(), image1.camera, image2.GetSize(), image2.camera, R1, R2, K1, K2));
#else
Pose pose;
ComputeRelativePose(image1.camera.R, image1.camera.C, image2.camera.R, image2.camera.C, pose.R, pose.C);
cv::Mat P1, P2;
cv::stereoRectify(image1.camera.K, cv::noArray(), image2.camera.K, cv::noArray(), image1.GetSize(), pose.R, Vec3(pose.GetTranslation()), R1, R2, P1, P2, Q, 0/*cv::CALIB_ZERO_DISPARITY*/, -1);
K1 = P1(cv::Rect(0,0,3,3));
K2 = P2(cv::Rect(0,0,3,3));
const Point3 _t(R2 * pose.GetTranslation());
ASSERT((ISZERO(_t.x) || ISZERO(_t.y)) && ISZERO(_t.z));
const REAL t(ISZERO(_t.x)?_t.y:_t.x);
#if 0
cv::Mat map1, map2;
cv::initUndistortRectifyMap(image1.camera.K, cv::noArray(), R1, K1, image1.GetSize(), CV_16SC2, map1, map2);
cv::remap(image1.image, rectifiedImage1, map1, map2, cv::INTER_CUBIC);
cv::initUndistortRectifyMap(image2.camera.K, cv::noArray(), R2, K2, image1.GetSize(), CV_16SC2, map1, map2);
cv::remap(image2.image, rectifiedImage2, map1, map2, cv::INTER_CUBIC);
return;
#endif
#endif
if (ISZERO(t))
return false;
// adjust rectified camera matrices such that the entire area common to both source images is contained in the rectified images
// 调整校正后的相机矩阵,使两个源图像的公共区域都包含在校正后的图像中
cv::Size size1(image1.GetSize()), size2(image2.GetSize());
if (!points1.empty())
Camera::SetStereoRectificationROI(points1, size1, image1.camera, points2, size2, image2.camera, R1, R2, K1, K2);
ASSERT(size1 == size2);
// compute rectification homography (from original to rectified image)
// 计算校正的单应性矩阵(描述的是两个图像像素坐标的转换矩阵H[u,v,1]^t=[u',v',1]^t)(从原始图像到校正图像)
const Matrix3x3 H1(K1 * R1 * image1.camera.GetInvK()); H = H1;
const Matrix3x3 H2(K2 * R2 * image2.camera.GetInvK());
#if 0
{ // display epipolar lines before and after rectification
Pose pose;
ComputeRelativePose(image1.camera.R, image1.camera.C, image2.camera.R, image2.camera.C, pose.R, pose.C);
const Matrix3x3 F(CreateF(pose.R, pose.C, image1.camera.K, image2.camera.K));
std::vector<Point2f> matches1, matches2;
#if 1
FOREACH(i, points1) {
matches1.emplace_back(reinterpret_cast<const Point2f&>(points1[i]));
matches2.emplace_back(reinterpret_cast<const Point2f&>(points2[i]));
}
#endif
RECTIFY::DrawRectifiedImages(image1.image.clone(), image2.image.clone(), F, H1, H2, matches1, matches2);
}
#endif
// rectify images (apply homographies)
// 校正图像,就是利用单应性矩阵,把原图像每个像素坐标转换到校正的图像下。
rectifiedImage1.create(size1);
cv::warpPerspective(image1.image, rectifiedImage1, H1, rectifiedImage1.size());
rectifiedImage2.create(size2);
cv::warpPerspective(image2.image, rectifiedImage2, H2, rectifiedImage2.size());
// mark valid regions covered by the rectified images
// 标记正确图像覆盖的有效区域
struct Compute {
static void Mask(Image8U& mask, const cv::Size& sizeh, const cv::Size& size, const Matrix3x3& H) {
mask.create(sizeh);
mask.memset(0);
std::vector<Point2f> corners(4);
corners[0] = Point2f(0,0);
corners[1] = Point2f((float)size.width,0);
corners[2] = Point2f((float)size.width,(float)size.height);
corners[3] = Point2f(0,(float)size.height);
cv::perspectiveTransform(corners, corners, H);
std::vector<std::vector<Point2i>> contours(1);
for (int i=0; i<4; ++i)
contours.front().emplace_back(ROUND2INT(corners[i]));
cv::drawContours(mask, contours, 0, cv::Scalar(255), cv::FILLED);
}
};
Compute::Mask(mask1, size1, image1.GetSize(), H1);
Compute::Mask(mask2, size2, image2.GetSize(), H2);
// from the formula that relates disparity to depth as z=B*f/d where B=-t and d=x_l-x_r
// and the formula that converts the image projection from right to left x_r=K1*K2.inv()*x_l
// compute the inverse projection matrix that transforms image coordinates in image 1 and its
// corresponding disparity value to the 3D point in camera 1 coordinates as:
// 根据depth=Bf/d的关系,计算投影矩阵Q将校正的视差图转到为校正的深度图。
ASSERT(ISEQUAL(K1(1,1),K2(1,1)));
Q = Matrix4x4::ZERO;
// Q * [x, y, disparity, 1] = [X, Y, Z, 1] * w
ASSERT(ISEQUAL(K1(0,0),K2(0,0)) && ISZERO(K1(0,1)) && ISZERO(K2(0,1)));
Q(0,0) = Q(1,1) = REAL(1);
Q(0,3) = -K1(0,2);
Q(1,3) = -K1(1,2);
Q(2,3) = K1(0,0);
Q(3,2) = -REAL(1)/t;
Q(3,3) = (K1(0,2)-K2(0,2))/t;
// compute Q that converts disparity from rectified to depth in original image
// 计算将视差从校正到原始图像深度转换的Q值
Matrix4x4 P(Matrix4x4::IDENTITY);
cv::Mat(image1.camera.K*R1.t()).copyTo(cv::Mat(4,4,cv::DataType<Matrix4x4::Type>::type,P.val)(cv::Rect(0,0,3,3)));
Q = P*Q;
return true;
}
根据求解的转换矩阵进行视差图和深度图相互转换
(左右滑动可以查看完整公式)
/**
* @brief 根据原图的深度图计算校正后的图像的视差图,视差图事先根据有效尺寸分配好。
*
* @param[in] depthMap 原图的深度图
* @param[in] invH 转换矩阵:把校正图的像素坐标转换到原图
* @param[in] invQ 转换矩阵把[x*z y*z z 1]*w in original image coordinates(z即为depth) 转到[x' y' disparity 1] in rectified coordinates
* @param[in] subpixelSteps 亚像素精度,如果是4则对于精度是0.25,主要是视差值存储的都是整型。所以得到的视差会乘这个值转成整型。具体转回float真值时会除掉这个数
* @param[in] disparityMap 视差图
*/
void SemiGlobalMatcher::Depth2DisparityMap(const DepthMap& depthMap, const Matrix3x3& invH, const Matrix4x4& invQ, Disparity subpixelSteps, DisparityMap& disparityMap)
{
auto pixel = [&](int, int r, int c) {
// rc加half窗口的原因是视差图是有效像素开始的起始是从(halfWindowSizeX,halfWindowSizeY)开始的而非(0,0)
const ImageRef x(c+halfWindowSizeX,r+halfWindowSizeY); Point2f u;
//把校正图像上的像素坐标转到原图坐标上
ProjectVertex_3x3_2_2(invH.val, x.ptr(), u.ptr());
float depth, disparity;
//取深度值depth并转到视差上
if (!depthMap.sampleSafe(depth, u, [](Depth d) { return d > 0; }) || !Image::Depth2Disparity(invQ, u, depth, disparity))
disparityMap(r,c) = NO_DISP;
else
disparityMap(r,c) = (Disparity)ROUND2INT(disparity*subpixelSteps);
};
ASSERT(threads.IsEmpty());
if (!threads.empty()) {
volatile Thread::safe_t idxPixel(-1);
FOREACH(i, threads)
threads.AddEvent(new EVTPixelProcess(disparityMap.size(), idxPixel, pixel));
WaitThreadWorkers(threads.size());
} else
for (int r=0; r<disparityMap.rows; ++r)
for (int c=0; c<disparityMap.cols; ++c)
pixel(-1, r, c);
}
// Compute the depth-map for the un-rectified image from the given disparity-map of the rectified image
// 同上反向即可
void SemiGlobalMatcher::Disparity2DepthMap(const DisparityMap& disparityMap, const AccumCostMap& costMap, const Matrix3x3& H, const Matrix4x4& Q, Disparity subpixelSteps, DepthMap& depthMap, ConfidenceMap& confMap)
{
ASSERT(costMap.empty() || costMap.size() == disparityMap.size());
ASSERT(!depthMap.empty());
ASSERT(confMap.empty() || confMap.size() == depthMap.size());
if (!costMap.empty()) {
confMap.create(depthMap.size());
auto pixel = [&](int, int r, int c) {
const ImageRef x(c,r); Point2f u;
ProjectVertex_3x3_2_2(H.val, x.ptr(), u.ptr());
u.x -= halfWindowSizeX; u.y -= halfWindowSizeY;
float disparity;
if (!disparityMap.sampleSafe(disparity, u, [](Disparity d) { return d != NO_DISP; })) {
depthMap(x) = 0;
confMap(x) = 0;
return;
}
float cost;
costMap.sampleSafe(cost, u, [](AccumCost c) { return c != NO_ACCUMCOST; });
depthMap(x) = Image::Disparity2Depth(Q, u, disparity/subpixelSteps);
confMap(x) = 1.f/(cost+1);
};
ASSERT(threads.IsEmpty());
if (!threads.empty()) {
volatile Thread::safe_t idxPixel(-1);
FOREACH(i, threads)
threads.AddEvent(new EVTPixelProcess(depthMap.size(), idxPixel, pixel));
WaitThreadWorkers(threads.size());
} else
for (int r=0; r<depthMap.rows; ++r)
for (int c=0; c<depthMap.cols; ++c)
pixel(-1, r, c);
} else {
auto pixel = [&](int, int r, int c) {
const ImageRef x(c,r); Point2f u;
ProjectVertex_3x3_2_2(H.val, x.ptr(), u.ptr());
u.x -= halfWindowSizeX; u.y -= halfWindowSizeY;
float disparity;
if (!disparityMap.sampleSafe(disparity, u, [](Disparity d) { return d != NO_DISP; }))
depthMap(x) = 0;
else
depthMap(x) = Image::Disparity2Depth(Q, u, disparity/subpixelSteps);
};
ASSERT(threads.IsEmpty());
if (!threads.empty()) {
volatile Thread::safe_t idxPixel(-1);
FOREACH(i, threads)
threads.AddEvent(new EVTPixelProcess(depthMap.size(), idxPixel, pixel));
WaitThreadWorkers(threads.size());
} else
for (int r=0; r<depthMap.rows; ++r)
for (int c=0; c<depthMap.cols; ++c)
pixel(-1, r, c);
}
}交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~