
自动驾驶中的激光雷达(LiDAR)总结
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
作者丨eyesighting@知乎
来源丨https://zhuanlan.zhihu.com/p/514851290
前言
为了理解当今市场上广泛的激光雷达技术,可以将其分为 4 代:
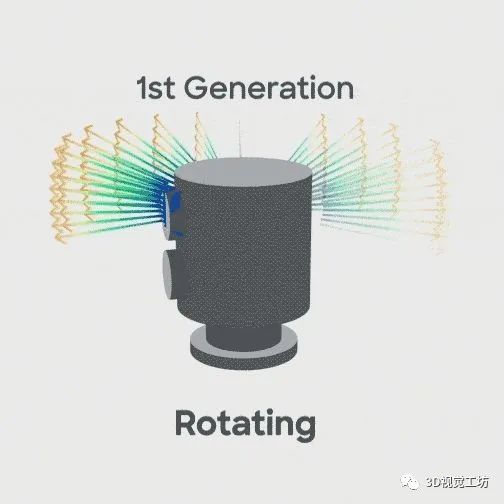
第1代:Rotating,机械旋转激光雷达;
第2代:MEMS,微驱动点扫描激光雷达;
第3代:Electronically Scanning,电子扫描激光雷达;
第4代:Global Shutter Flash,固态全闪光激光雷达。
1.第1代-机械旋转扫描激光雷达
1.1 基本原理
机械旋转激光雷达将多个离散激光器和探测器集成在一个外壳中。垂直分辨率由封装在外壳中的激光器数量定义,而 360 度视野是通过整个系统的快速机械旋转来实现的。
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
前言
为了理解当今市场上广泛的激光雷达技术,可以将其分为 4 代:
第1代:Rotating,机械旋转激光雷达;
第2代:MEMS,微驱动点扫描激光雷达;
第3代:Electronically Scanning,电子扫描激光雷达;
第4代:Global Shutter Flash,固态全闪光激光雷达。
1.第1代-机械旋转扫描激光雷达
1.1 基本原理
机械旋转激光雷达将多个离散激光器和探测器集成在一个外壳中。垂直分辨率由封装在外壳中的激光器数量定义,而 360 度视野是通过整个系统的快速机械旋转来实现的。
 机械旋转扫描激光雷达
机械旋转扫描激光雷达
1.2 优劣分析
虽然这在激光雷达诞生之初是一项令人兴奋的技术,并在 2000 年代 DARPA 大挑战赛期间帮助推出了该技术,但旋转系统以高昂的价格提供有限的分辨率,因为它们的分辨率是由离散激光器的数量定义的,这些激光器可以组装成一个小外壳,并通过这些激光器和收集其信号的离散探测器之间的精细对准。
此外,这些系统还存在扫描系统常见的几个额外缺陷,例如运动模糊、卷帘快门、失真以及由振动或冲击引起的可靠性问题。这些系统旨在优化系统性能,但忽略了尺寸、重量、功率、成本、冷却和合规性等考虑因素。具体来说,它们往往很大并产生 360 度视野,无论是否有必要。因此,它们通常从车顶突出,不适合将美学和空气动力学集成到车辆中。
1.3 主流产品
Velodyne-AlphaPrime
企业官网:https://velodynelidar.com/products/alpha-prime/
产品主页:https://velodynelidar.com/products/alpha-prime/

AlphaPrime

AlphaPrime
Ouster-OS2
企业官网:https://ouster.com/zh-cn/
产品主页:https://ouster.com/zh-cn/products/scanning-lidar/os2-sensor/scanning-lidar/os2-sensor/

OS2

OS2
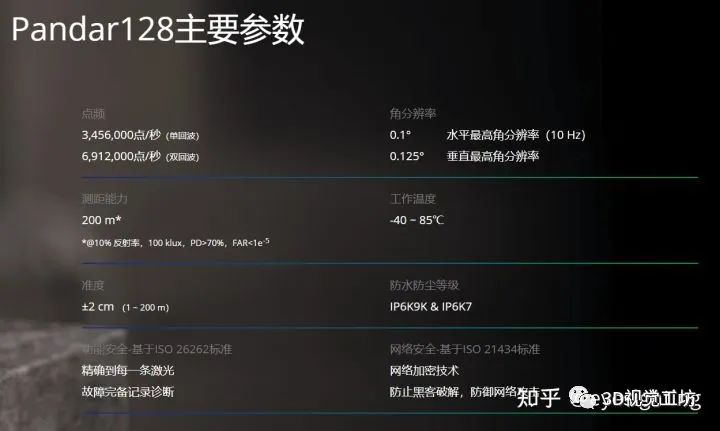
禾赛-Pandar128
企业官网:https://www.hesaitech.com/zh
产品主页:https://www.hesaitech.com/zh/Pandar1288

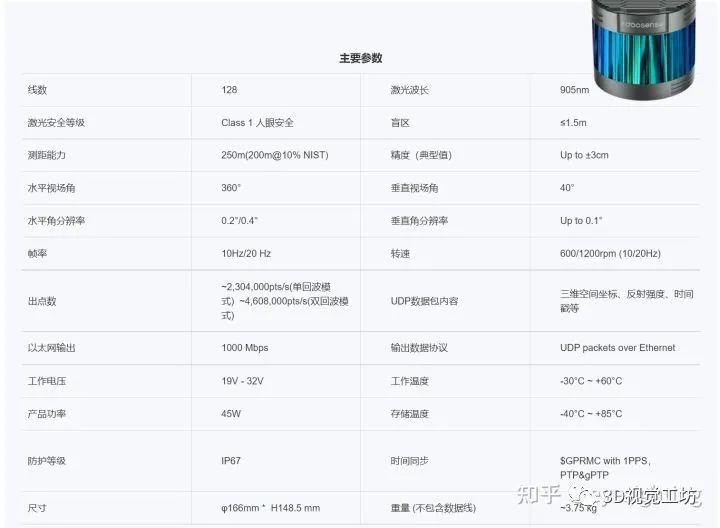
速腾聚创-RS-Ruby
企业官网:https://www.robosense.cn/
产品主页:https://www.robosense.cn/rslidar/RS-Ruby
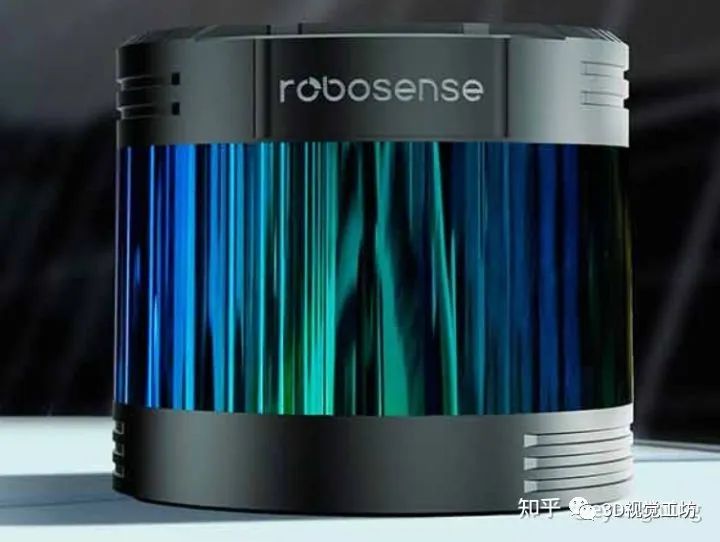
RS-Ruby
RS-Ruby
2.第2代-微驱动扫描激光雷达
2.1 基本原理
针对旋转镜激光雷达系统的不足,几家公司开发了微驱动扫描系统。这些系统通过偏转一束或多束准直激光束以及从一个或多个镜子接收到的信号来操作,从而扫描视场并将目标回波引导至检测器。使用离散微致动器或使用集成 MEMS 芯片实现光束控制。微驱动扫描系统存在许多严重缺陷。最值得注意的是,这些系统在以给定帧速率运行时会权衡视场分辨率。
例如,以每秒 25 帧(或 40 毫秒帧时间)运行的点扫描系统为例。由于光需要 1.63 微秒才能传播到 250 米目标并返回,因此单光束只能捕获 40 毫秒/1.63 微秒 = 每帧 24,500 个目标方向。如果系统的角分辨率为 0.05° x 0.05°,则总视野将被限制在大约 60 平方度,例如 7.7° x 7.7°。如此狭窄的视场通常不足以用于远程应用,迫使此类激光雷达系统在整个视场以可变分辨率运行。可变分辨率存在丢失意外对象的风险,并对下游数据融合引擎造成计算负担。
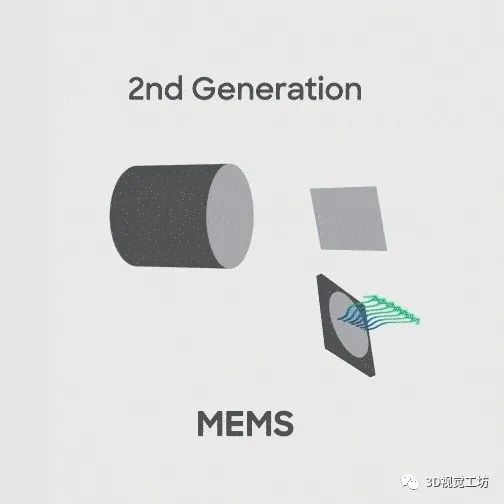 微驱动扫描激光雷达
微驱动扫描激光雷达
2.2 优劣分析
与第1代系统类似,第2代系统也存在运动伪影。例如,由于视野采集是连续的,当车辆处于第一位置时,可以对对象进行第一次成像,然后当由于车辆的变化而出现在不同方向时,可以再次扫描相同的对象位置。因此,使用此类系统在点云中看到街道标志两次出现的情况并不少见。
微驱动系统也存在机械缺陷。由于实现其角分辨率所需的严格公差,这些系统更容易受到振动、冲击和温度影响。它们还需要仔细对齐,除其他因素外,这也导致了它们的高成本。无论是利用直接飞行时间信号采集还是 FMCW(多普勒频移),当前的第 2 代激光雷达系统都在继续与复杂性、可靠性以及运动伪影作斗争。
2.3 主流产品
Innoviz-InnovizTwo
企业官网:https://innoviz.tech/
产品主页:https://innoviz.tech/innoviztwo
InnovizTwo

InnovizTwo
Luminar-Iris
企业官网:https://innoviz.tech/innoviztwo
产品主页:https://www.luminartech.com/iris/
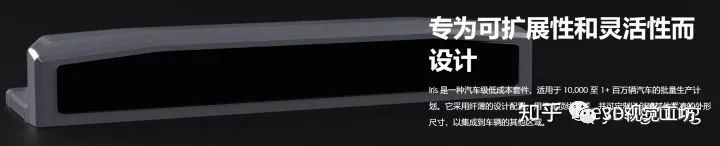
Luminar-Iris

Luminar-Iris
Opsys-SP3.0
企业官网:https://www.opsys-tech.com/
产品主页:https://www.opsys-tech.com/products
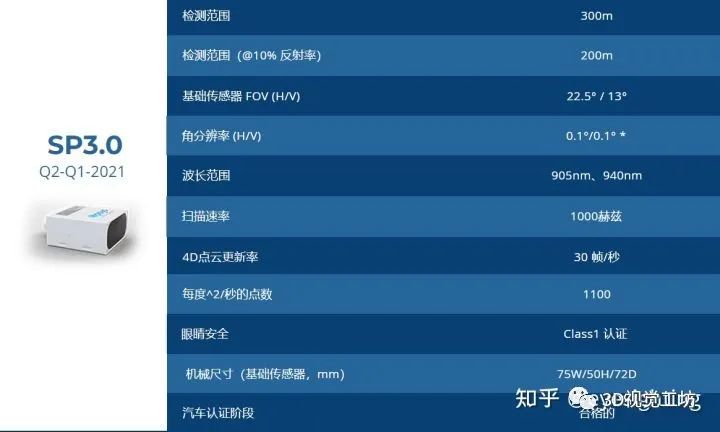
SP3.0
速腾聚创-RS-M1
企业官网:https://www.robosense.cn/
产品主页:https://www.robosense.cn/rslidar/RS-LiDAR-M11
量产车型:路特斯(4)、埃安LXPlus(3)、威马M7(3)、小鹏G9(2)、智已LS7(2)

RS-M1
RS-M1
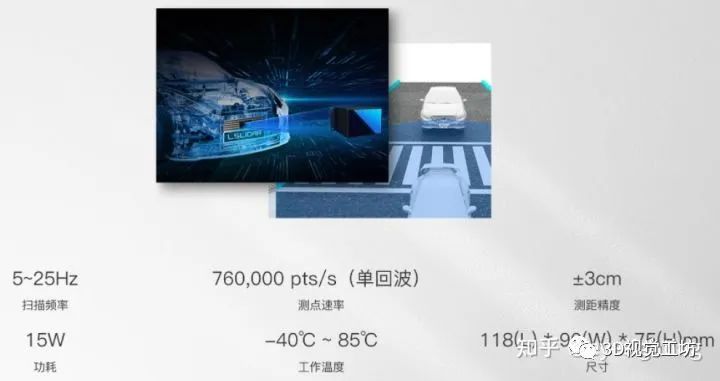
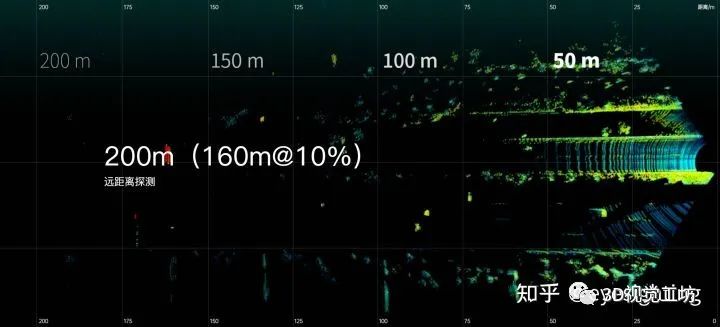
禾赛-AT128
企业官网:https://www.hesaitech.com/zh
产品主页:https://www.hesaitech.com/zh/AT128
量产车型:路特斯、集度、理想、高合
AT128
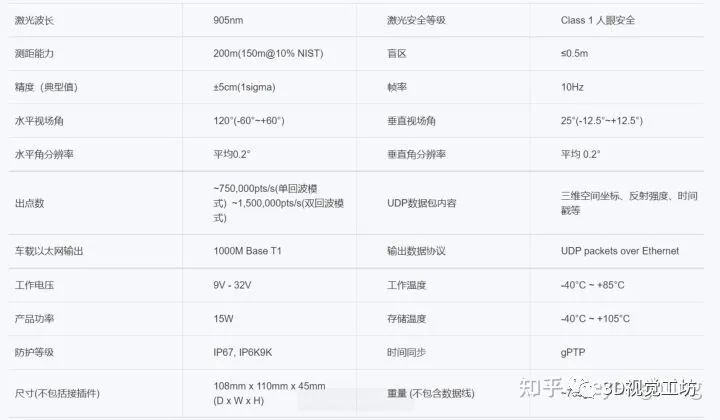
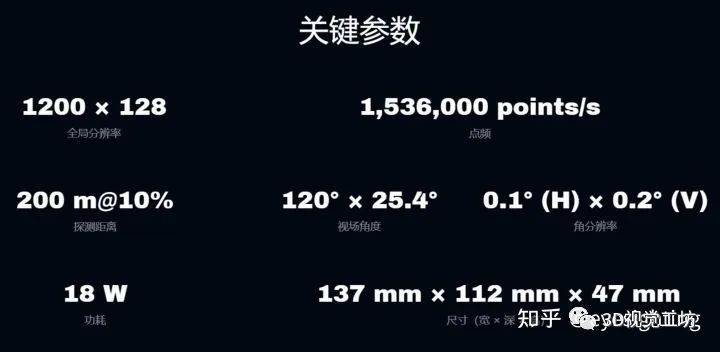
图达通-Falcon
企业官网:https://www.innovusion.info/
量产车型:ET7(1)
Falcon

Falcon
镭神-C系列
企业官网:https://www.leishen-lidar.com/
产品主页:7款
CX128S1:https://www.leishen-lidar.com/ch/154
CH128X1:https://www.leishen-lidar.com/ch/112
CH128:https://www.leishen-lidar.com/ch/68
CH64:https://www.leishen-lidar.com/ch/69
CH32:https://www.leishen-lidar.com/ch/70
CH16:https://www.leishen-lidar.com/ch/71
CB64S1:https://www.leishen-lidar.com/ch/72
CH128X1
CH128X1
CH128X1
3.第三代-电子扫描激光雷达
基本原理
对更可靠和更具成本效益的汽车激光雷达的追求导致一些公司开发电子扫描激光雷达。这些系统利用电子设备在没有机械运动的情况下控制激光束。这些方法包括光学相位阵列 (OPA) 以及使用具有集成微透镜的 VCSEL 阵列,这些微透镜将阵列部分的光输出引导到视场的各个子区域。
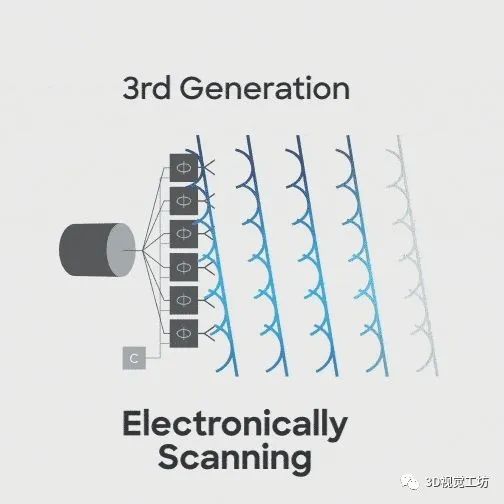 电子扫描激光雷达
电子扫描激光雷达
优劣分析
虽然第 3 代激光雷达比机械扫描激光雷达提供更高的可靠性,但由于它们连续采集完整的点云,它们仍然存在运动伪影。此外,许多扫描技术已被证明缺乏成熟度或对温度或设备到设备的可变性敏感。
主流产品
览沃-HAP
企业官网:https://www.livoxtech.com
产品主页:https://www.livoxtech.com/hap
量产车型:小鹏
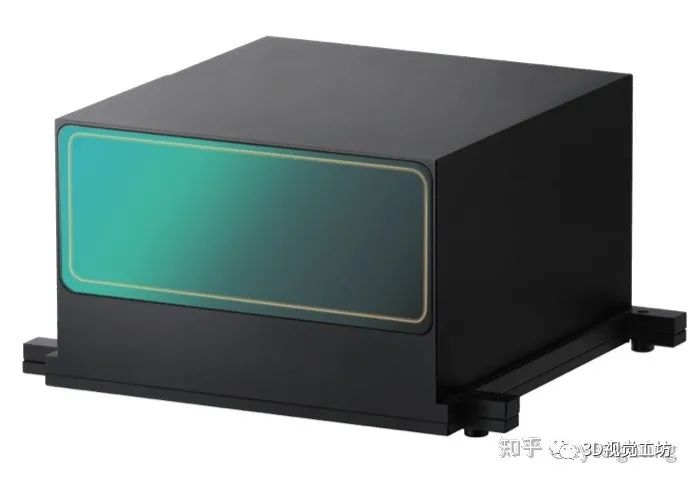
HAP
HAP
4.第四代-固态全闪光激光雷达
4.1 基本原理
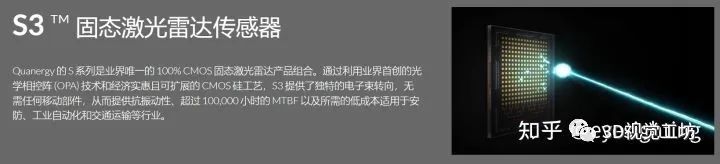
Sense Photonics 开发了唯一满足市场需求的闪光激光雷达系统。该公司通过使用其专有的微转移印刷工艺打印大量垂直腔表面发射激光器 (VCSEL) 来构建其定制发射器。通过扩散 VCSEL 的输出以照亮整个视野,确保了眼睛的安全性和可靠性。对于其接收器,Sense 选择了集成在内部设计的智能成像传感器芯片中的 CMOS 单光子雪崩二极管 (SPAD),该芯片可同时处理超过 100,000 个像素的直方图。该集成系统现已交付给选定的客户,可在广阔的视野范围内提供前所未有的点云分辨率。
 固态全闪光激光雷达
固态全闪光激光雷达
4.2 优劣分析
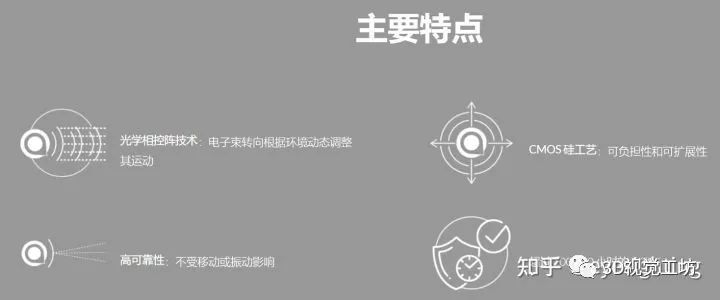
Sense 的第 4 代激光雷达采用可批量制造且符合汽车标准的技术,实现了前所未有的成本效益。其独特的架构可实现真正的全局快门采集,从而消除传统激光雷达世代中普遍存在的运动伪影。由于不需要扫描,该系统对振动和冲击具有鲁棒性,并且不需要精细对准或校准。凭借其类似摄像头的架构,这些系统可以以美观和空气动力学的方式有效地集成到车辆中。
4.3 主流产品
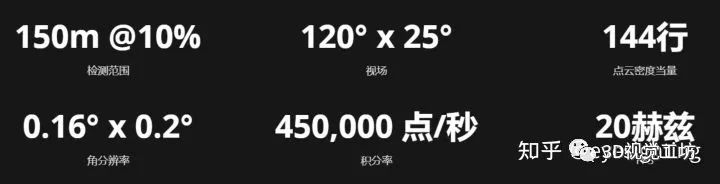
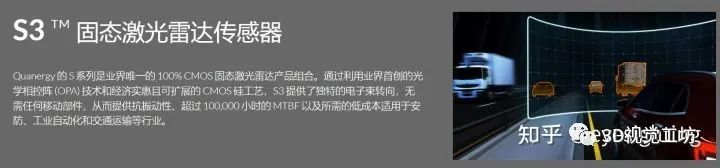
Quanergy-S3
企业官网:https://quanergy.com/
产品主页:http://180.76.36.115:8090/display/Sensor/

S3

S3
S3
S3
S3
SensePhotonics-Godzilla
企业官网:https://sensephotonics.com/
产品主页:https://sensephotonics.com/project-godzilla-end-of-compromise/
Godzilla
5.其他类型激光雷达
5.1 4DLiDAR
Aeva-AeriesII
企业官网:https://www.aeva.com/
产品主页:https://www.aeva.com/aeries-ii/
视频课程:自动驾驶中的深度学习模型部署实战
AeriesII

AeriesII
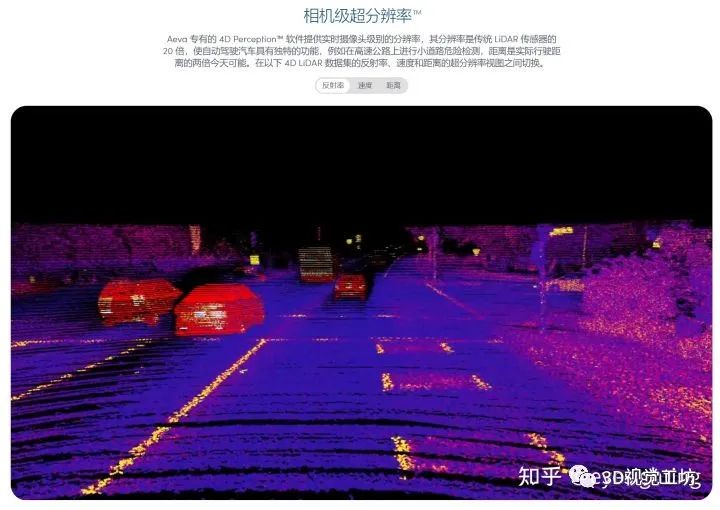
AeriesII
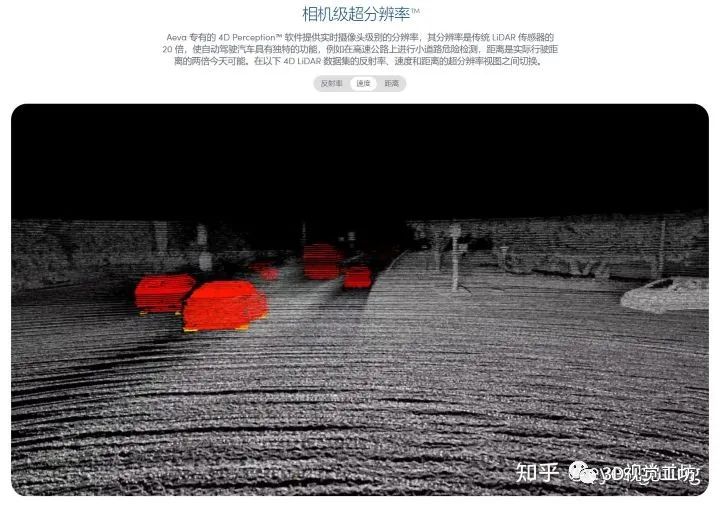
AeriesII

AeriesII
5.2 4DCam
TetraVue-4DCam
企业官网:https://tetravue.webflow.io/
产品主页:https://tetravue.webflow.io/technology

4DCam

5.3 LiDAR平台
Leddar-XLRator
企业官网:https://leddartech.com/
产品主页:https://leddartech.com/solutions/lidar-xlrator/
r-xlrator/

XLRator
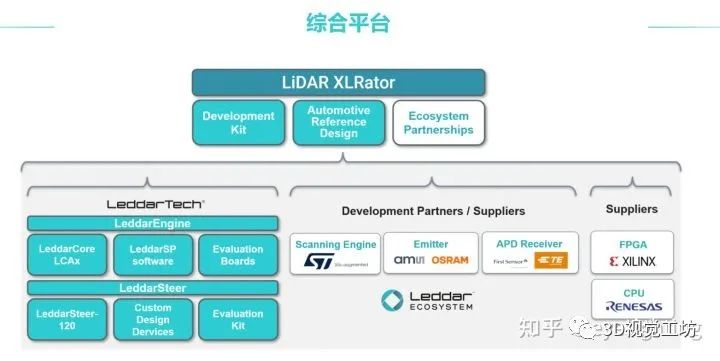
XLRator

XLRator
总结
第一代的激光雷达无法过车规认证,主要应用再非乘用车领域,比如:工业、物流,环卫,或者在乘用车乘领域作为数据、算法、软件的真值系统。第二代的激光雷达、第三代激光雷达的开发与量产是激光雷达在车领域落地的关键,目前很多车型已量产该类型的激光雷达。第四代激光雷达、4DLiDAR正在蓬勃发展,国内外不少企业正在研发,后续应该会逐渐走向落地和量产。4DRadar、4DCamera、第四代LiDAR(纯固态)、4DLiDAR可能会独立成为一种主流的传感器,也可能这几种传感器/技术走向融合,发展出新类型的复合传感器。
本文仅做学术分享,如有侵权,请联系删文。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

