点击上方“芯片之家”,选择“置顶/星标公众号”
作者 | 嵌入式应用研究院
素材来源 |Github
一、项目概况

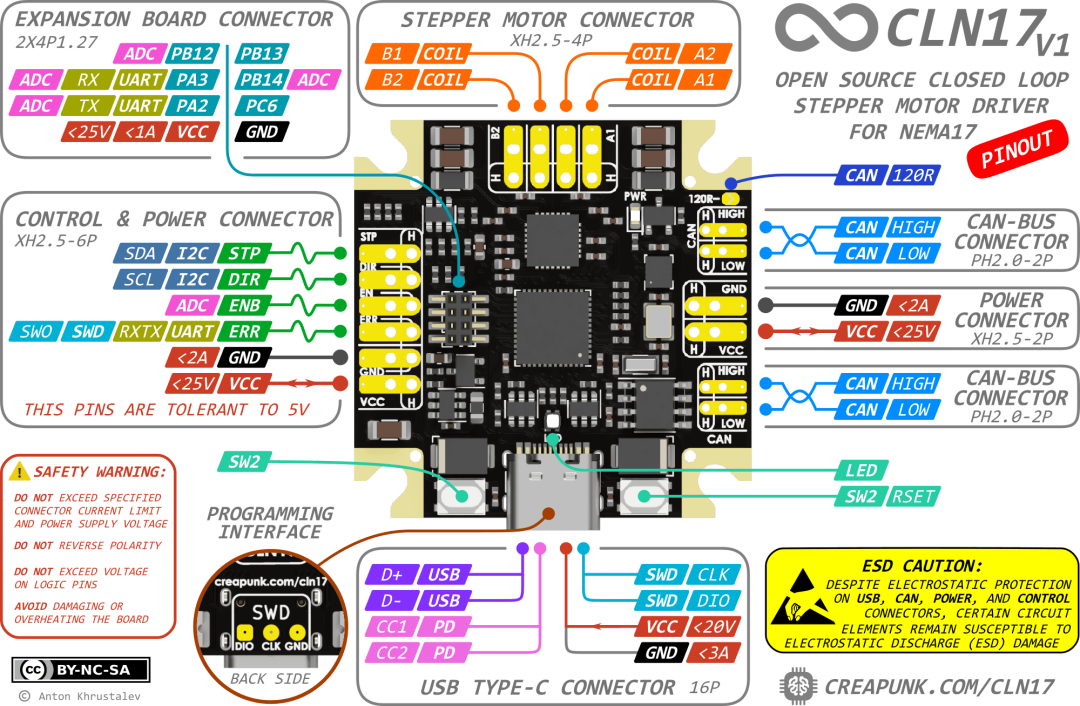
CLN17 电机驱动器是一款开源、紧凑、高性能的闭环步进电机驱动器,专为 NEMA17 外形尺寸电机设计。该驱动器提供先进的功能,如静音和平稳的运动、高精度的位置控制和节能功能,使其成为各种应用的理想选择,包括机器人、CNC 机床和 3D 打印机。
二、板框图
三、项目特点
(1)位置控制和精度
🕹️ 闭环控制:电机驱动器支持闭环控制,集成编码器进行实时位置监控和调整,确保在具有挑战性的条件下实现精确运动。
📏 精细定位:0.01 度的卓越位置控制精度确保了位置信息的高效和低延迟处理,并将噪音降至最低,从而实现平稳运行。
🎯 极其精确的无传感器泊车:先进的无传感器泊车算法无需额外的传感器即可准确定位电机,防止系统损坏。
📌 嵌入式 6 轴 IMU:LSM6DSO IMU 模块通过 3 轴陀螺仪和 3 轴加速度计提供卓越的惯性测量功能,提供精确的运动反馈、系统振动检测和应急响应。性能和效率
💪 自适应转矩控制和能源效率:电机驱动器根据负载要求调整扭矩,优化能源效率,减少应力并延长电机寿命。
🚀 高性能:32 位 170MHz ARM Cortex-M4® 微处理器为应用代码提供了显著的性能改进和充足的功能。
🔇超静音和平稳运行:TMC2209超静音驱动器可确保对噪声和振动敏感的应用安静平稳运行。
⏩ 被动制动和续流:被动制动和续流功能可实现电机的平稳减速和滑行,从而增强控制和效率。
(2)兼容性和模块化
🤝 开源方法:完全访问硬件原理图、PCB 布局、固件和软件,促进透明度、协作和创新,从而创建定制解决方案。
💻 增强的兼容性:多种连接选项,包括 UART、I2C、CAN 总线(支持 FD)和 USB2.0 Type-C(支持 PowerDelivery),有助于实现无缝通信并轻松集成到现有系统中。
🧩 模块化概念:各种配置满足尺寸和性能要求,同时保持成本效益,支持扩展板的附加功能。
🌐 网络互联:支持网络配置架构,允许多个驱动程序相互连接,而无需额外的设备。
(3)安全可靠
🔧 可靠运行:通过宽温度范围、诊断功能以及内置的 ESD、电流限制、反极性、过载和 3.3V/5V IO 容差保护功能,确保可靠运行。
🛡️ 增强的安全算法:增强的安全算法可智能监控电机状况,以保护电机系统和用户免受潜在伤害。
⏰ 具有实时时钟的精确定时:专用的 HSE 和 RTC 时钟晶振可确保对时间关键型任务的精确定时、可靠的代码执行和准确的时间处理。
四、应用场景
CLN17 步进电机驱动器适用于广泛的应用,包括但不限于下列应用。
(一)学习与研究
🎓 学习平台:开源设计和清晰的文档提供了通用的电机控制学习解决方案,促进了学生和教育工作者之间的创新和协作。例如:机械臂套件;太阳能跟踪系统。
🔬 实验室设备:精度、安全性和反馈功能对于可靠操作、准确结果和研究人员安全至关重要。例如:自动化液体处理系统;精密样品定位系统。
🤝 协作机器人和学习系统:精确的轴位置和速度检测使电机驱动器适用于协作机器人和学习系统,从而实现安全的人机协作。例如:用于社交互动的人形机器人;用于装配任务的协作式机械臂。
(二)机器人和自动运动
🛠️ CNC机床和3D打印机:精确和无差错的定位对于CNC机床和3D打印机的精确制造至关重要。例如:高速或大幅面3D打印机;激光切割雕刻机;台式数控铣床。
🤖 机器人和自动化系统:精确的控制和运动提高了机器人和自动化的整体性能。例如:自主移动机器人;拾取和放置机器人系统。
🏭 工业运动控制系统:可靠性和与工业接口的兼容性提高了工业运动控制的性能。例如:输送系统和三角机器人;自动化装配线。
(三)触觉和稳定
📳 触觉和力反馈系统:精确的电流和力控制对于逼真的触觉和力反馈体验至关重要。例如:用于远程控制的远程操作系统;具有力反馈的虚拟现实控制器。
🔭 相机/望远镜稳定系统:相机和望远镜系统的稳定方向依赖于精确的定位和位置保持,从而简化了系统校准,以实现精确的组件对准。例如:电动望远镜支架;摄像机滑块。
该项目仍在开发中,无法保证所有项目材料都没有错误,请大家持续关注更新。
Github开源地址:https://github.com/creapunk/CLN17
CLN17 Wiki:https://creapunk.com/